



1 引 言
果园生产作业具有劳动强度大、劳动力密集、季节性强的特点。采用机器人代替人力能够有效缓解季节性用工难的问题,同时还能大大提高作业效率[1]。多机器人协同作业则能够完成一些单一机器人难以完成的任务。通信是多机器人之间彼此交换信息以及相互协作的重要基础[2]。与其他通信技术相比,Wi-Fi具有传输速度快、扩展性好、覆盖范围广、设备成本相对较低等特点[3],传输距离可满足果园多机器人通信的要求。Wi-Fi有基础网(Infrastructure)模式和自组网(Ad Hoc)两种组网模式[4]。果园内通常缺乏通信基础设施,为完成作业任务,缩减多机器人通信成本,采用Ad Hoc网络搭建Wi-Fi通信环境是解决果园内多机器人通信的一种可行方案。
在Ad Hoc网络中,路由协议是保障各节点(即机器人)有效信息交换的关键技术。按照路由建立方式的不同,Ad Hoc网络路由协议可分为表驱动路由协议、按需路由协议和混合路由协议[5]。表驱动路由协议的优点在于,当节点有分组待发送时可以即时获取所需路由,但多机器人在果园移动过程中通信网络拓扑发生变化后,路由更新需要的开销会随之增加[6];按需路由协议中的无线自组网按需平面距离向量路由协议(Ad Hoc On-Demand Distance Vector Routing,AODV)是基于表驱动方式目标顺序距离矢量(Destination Sequenced Distance Vector,DSDV)协议的优化协议[7,8],可以降低路由开销、节省网络资源,较适合在恶劣的果园环境中使用[9],已成为近年来无线通信领域的研究热点[10]。
Bisen和Sharma[11]针对监测与邻居的链路连接情况和维护路由表中能耗大的问题,提出了一种节能路由方法,能够减少不必要的消息广播。Das和Tripathi[12]针对应节点电池容量不足以维持节点高移动性的问题,提出了一种智能能量感知的高效路由协议,降低了与移动节点相关的不确定性。Fang等[13]为同时提高节点的传输性能和增强节点的安全性能,提出了一种轻量级安全路由协议,能实现节点的传输、能效、安全性的权衡。林涛等[14]针对传统AODV协议在路由建立过程中洪泛机制造成通信开销大的问题,引入基于路由级别的优化策略,减少了参与路由建立的节点数目,节省了能量。王军袖[15]针对节点间的距离、动态控制节点发射功率能量消耗大,节点死亡等问题,提出了一种新的能量优化路由算法,降低网络能量消耗,延长网络寿命,提高分组投递率和平均吞吐量。Mafirabadza和Khatri[16]针对电池电量耗尽导致的网络重建问题,对AODV作出了改进,通过选择能量更大的最短路径来增加网络寿命。Jabbar等[17]针对节点移动的不可预测导致的开销过大、能耗过高的问题,引入了一种能量和移动性感知的多点中继选择机制,利用链路评估函数对链路的稳定性进行排名,选择最有效和稳定的路径到达目的地。Periyasamy和Karthikeyan[18]针对通信节点易出现链路故障和路由断裂的问题,提出了一种新型的节点不相干多路径路由协议,利用路径-链路质量估计器和路径-节点能量估计器等两个指标,在任意源点和目的点对之间找到多条链路可靠节能路径进行数据传输。Reddy和Satyanarayana[19]针对节点的电池能量和链路的稳定性造成数据包丢失和发生拥塞问题,提出了一种被称为高效稳定的多路径路由的方法,根据节点的速度、方向、剩余能量、发射能量等参数选择节点之间的传输数据包的路径。上述这些改进的AODV协议可根据路由请求算法建立从源节点到目的节点的路由,在路由请求(Route Request,RREQ)过程中优先选用最短路径路由,即选用跳数最少的路由。但对于果园而言,环境冠层低矮、枝叶繁茂、株间枝条交叉等因素对节点数据传输能力影响较大,现有改进的路由协议在此环境中并不适用。尤其是多机器人在“一对所有”的广播通讯模式下,受环境影响易造成机器人通讯间的冗余传播[20],从而导致数据分组拥塞甚至丢失,更严重时会产生路由中断、时延加剧,降低了果园多机器人无线通信系统的稳定性能。
目前,现有农业环境路由协议的研究大多集中在无线传感器网络,不适用于缺乏通信设施条件的Ad Hoc网络,而果园生产环境大多无法配备基础通信设施。因此,为提升多机器人在果园中的通信性能,本研究选择桃园为环境对象,根据课题组[21]在桃园环境下得到的Wi-Fi信号传播模型,提出基于优先节点和路径信号强度阈值的无线自组网按需平面距离向量路由协议(Improved AODV Routing Protocol Based on Signal Strength Threshold and Priority Nodes,ADOV-SP),并通过NS2(Network Simulator Version 2)软件对ADOV-SP协议与传统AODV协议性能进行仿真对比分析,最后在多机器人通信物理平台上测试了AODV-SP协议通信系统的性能。
2 AODV-SP设计
AODV协议分为路由发现和路由维护两个阶段[22],路由发现是AODV路由维护的基础。由源节点(发送信息的机器人)到目的节点(最终接收信息的机器人)之间经过不同节点会产生不止一条路径。考虑到节点的移动性能较强,路由不稳定,选择与源节点和中间节点(与发送信息机器人相邻的其他机器人)距离相近的节点发送和接收信息能提高信号强度,减少在“一对所有”通讯模式下无用信息塞满带宽的可能性。
2.1 AODV-SP 协议
2.1.1 AODV-SP 优先节点的引入
在AODV-SP协议的路由发现阶段引入参数变量“优先节点”,即在源节点或中间节点的有效通信范围 R2内的节点(如图1 所示),其中R为有效通信距离,用于接收和发送信息。节点有效通信距离由实际测试得到,节点以2.4 GHz Wi-Fi通信频率收发信息时,断裂后节点重新连接的最佳通信距离为5 m,此处R取5 m。
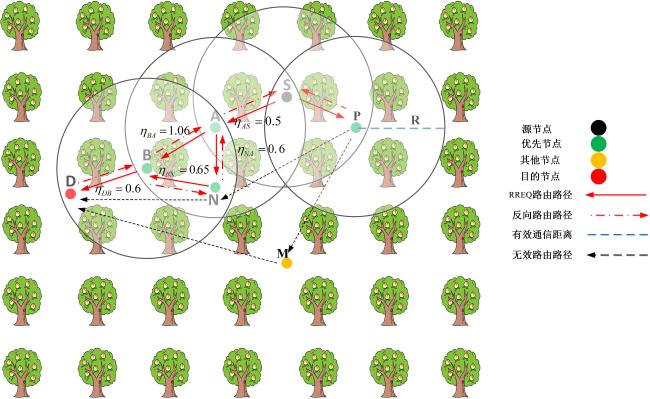
当节点S需要与目的节点D传输数据,但没有目的节点D的合法路由时,可以向全网广播RREQ消息,通过网络寻求到目的节点的路由。通过判断节点间的距离L与源节点有效通信距离R之间的关系,由于节点A、P与源节点S的距离L<R内,故选择节点A、P作为节点S的优先节点。节点S生成向其相邻节点A、P广播RREQ分组。当节点A、P接收到该RREQ分组后,会判断该节点是否为目的节点D或是否有到达目的节点D的路由信息;若是目的节点D,则建立反向路由并发送RREP(Route REPly)分组,反之丢弃该分组;判断该节点是否有到达目的节点D的路由信息,若是则更新并转发RREQ分组数据S→A→B直至到达目的节点D,否则就丢弃该分组。
节点间有效通信范围阈值可根据网络中的节点密度进行调整。当节点密度较大时,适当减小有效通信范围的取值,反之则适当增大其取值。
节点间的距离L为:
其中,θ为由节点j和上一跳节点i的横纵坐标计算所得;xi、yi为上一跳节点的横纵坐标,xj、yj为当前节点的横纵坐标。
2.1.2 添加AODV-SP 信号强度阈值
研究前期,课题组在位于陕西省杨凌示范区的国家桃产业技术体系西安综合试验站中(桃园基本环境:桃树行距约为4 m左右,株距约为2 m左右,株高约为3 m左右,树冠厚2.5 m左右,果树生长期在10年以上。主要枝干高度较矮,果树行间被茂密的枝叶所覆盖,枝干重叠交叉,重叠部分距离地面最高仅为1.2 m),仅能容纳单个小型机器人通过。小型机器人上架设的移动通信设备受周边树木冠层、树干、杂草等因素影响,在传输信号时易出现信号折射、反射、散射等现象,增加信号丢失概率。通过桃园Wi-Fi信号传播试验和SPSS回归分析,得到了不同收发节点方位角θ(0°、30°、60°和90°)和不同收发节点高度(25、50、75 和100 cm)在一定距离d(单位:m)时桃园内Wi-Fi信号的接收强度预测模型[21]。
其中,Pr为信号接收强度,dBm;d为传播距离,m;θ为收发节点方位角,(°)。
其中, 为节点j以节点i为发射节点时的信号接收强度,dBm; 为节点i和节点j之间的信号强度阈值,dBm。通过Wi-Fi信号接收强度预测模型得到路径信号强度阈值η,添加到RREP分组中。
RREP转发至源节点后,根据收到的两两节点之间的信号阈值,计算得出最终路径信号的强度阈值η,并选取从源节点发射信号到目的节点的最强信号路径进行通信。
2.2 AODV-SP报文设计
为适应AODV-SP,需要对AODV-SP报文进行修改,分别为AODV-SP RREQ(路由请求)报文和AODV-SP RREP(路由响应)报文。
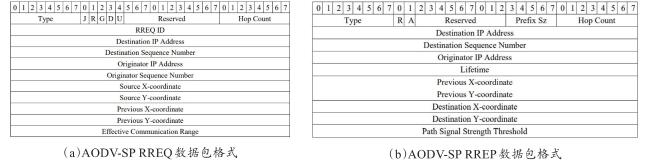
AODV-SP RREQ报文用于向网络寻求目的节点,如图2(a) 所示。其中,Type为分组类型,J为标志位,R为修复标志位,G为标记中间节点是否有到目的节点的路由,D为应答标志,U为对未知序列号的标记。Reserved为保留位,Hop Count为跳数,Destination IP Address表示目的节点地址,Destination Sequence Number为目的序列号,Originator IP Address为源节点的IP地址,Originator Sequence Number为源节点序列号。此外,与传统的AODV相比,在AODV-SP的RREQ数据包内还增加了Source X-coordinate源节点X轴坐标、Source Y-coordinate源节点Y轴坐标、Previous X-coordinate上一跳节点X轴坐标、Previous Y-coordinate上一跳节点Y轴坐标和Effective Communication Range有效通信范围。
AODV-SP RREP 报文用于目的节点确认收到信息,如图2(b) 所示。其中,Type、R、Reserved、Hop Count、Destination IP Address、Destination Sequence Number、Originator IP Address、Previous X-coordinate和Previous Y-coordinate与RREQ报文一样。与传统AODV路由协议不同,图2(b) 中的A表示回复标志,Prefix Sz表示前缀长度,Lifetime表示RREP分组时间,Destination X-coordinate表示目的节点X轴坐标、Destination Y-coordinate表示目的节点Y轴坐标和Path Signal Strength Threshold路径信号强度阈值。
3 AODV-SP路由算法构建
借鉴AODV路由发现阶段的工作原理,与AODV-SP中的“优先节点”和信号强度阈值相对应,AODV-SP路由算法的具体实施步骤主要分为发现路由算法和选择路由算法两部分,其中发现路由算法对应“优先节点”,选择路由算法对应“信号强度”。
3.1 发现路由算法
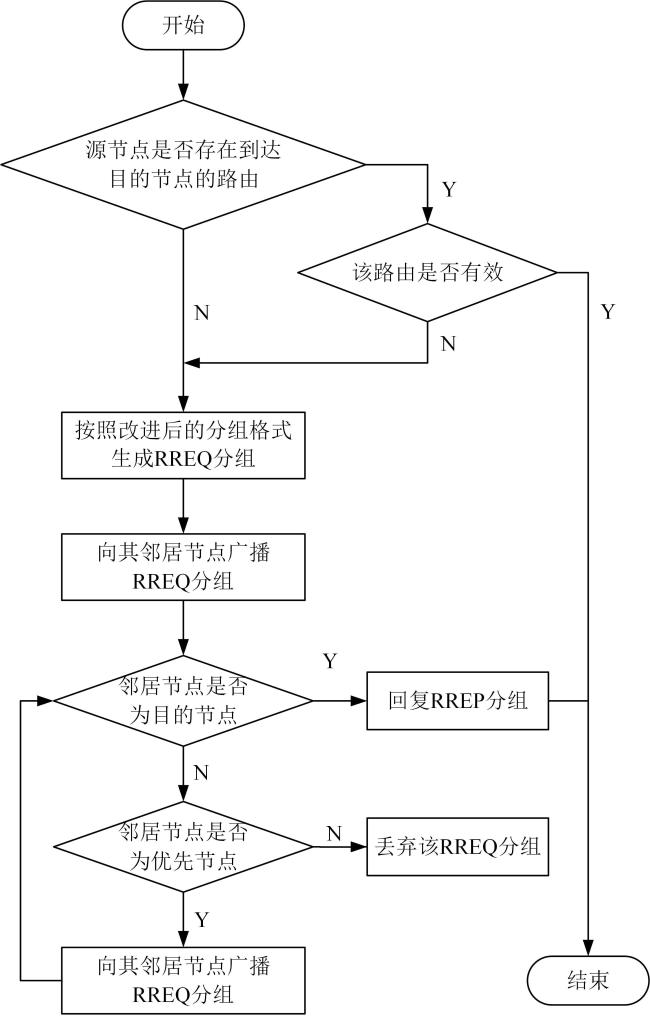
AODV-SP的发现路由算法流程如图3 所示,当源节点S向目的节点D发送数据分组时,先检查路由表项中是否有直接到达目的节点D的路由,若有则沿此路径进行数据通信,反之源节点S发起路由请求,向它相邻节点A、P广播RREQ分组。当有节点A、P接收到RREQ后,判断该节点是否为目的节点D或是否有到目的节点D的路由,若是,则建立反向路由,反之需根据公式(1) 计算两节点间的距离L,再比较L与有效通信距离R的关系;判断该节点是否为前一节点的优先节点,若是,则继续转发RREQ分组,否则就丢弃该RREQ分组。其中节点间的距离L由各节点的横纵坐标获得,即利用通用横墨卡托格网系统(Universal Transverse Mercartor Grid System,UTM)坐标系对全球导航卫星系统 (Global Navigation Satellite System,GNSS)经纬度信息进行坐标转换。因此,引入优先节点这一参量后,实际上只有①S→A→N→B→D和②S→A→B→D两条路由路径用于广播RREQ分组(如图1 所示),减少了两条非优先节点的路由路径③S→P→N→D和④S→P→M→D引起的RREQ洪泛,可有效抑制AODV广播风暴。
3.2 选择路由算法
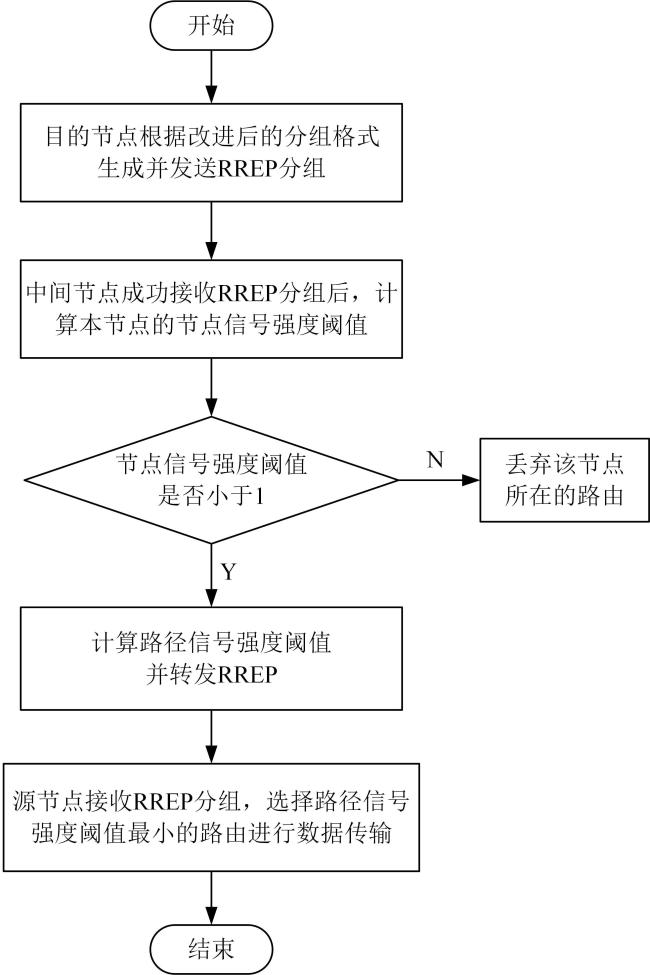
路由选择对多机器人通信系统提供可靠通信服务至关重要[23]。AODV-SP的路由选择算法流程如图4 所示。当中间节点接收到RREP分组后,首先根据公式(4) 计算该节点的信号强度阈值ηij,若是ηij˂1则转发分组,并基于公式(5) 计算路径信号强度阈值,反之则将该分组丢弃。最终当目的节点接收到RREP分组后,判断接收到的所有可能路由的信号节点强度阈值,并选择信号节点强度阈值最小的路径为源节点至目的节点的最佳路由。如图4 所示,引入节点信号强度阈值和路径信号强度阈值后,充分考虑每个节点的数据传输能力,首先丢弃信号节点强度阈值η≥1所在的路径,即丢弃路径② S→A→B→D,然后计算其余路径的路径信号强度阈值,可得路径 ①S→A→N→B→D的信号强度阈值为2.35,则该路径为源节点S和目的节点D的数据通信路径。
通过引入优先节点和信号节点强度阈值,使多机器人在果园内以“一对所有”通讯模式互换信息时,由原有路由中的四条路由路径减少为一条,即保证了有效信息的传递,又减少了无用信息塞满带宽的可能性。
4 AODV-SP性能仿真测试
为验证改进后的AODV-SP性能,通过NS2仿真软件,分析了节点不同移动速度下该协议的性能,并与传统的AODV进行性能对比。
4.1 仿真环境设置和相关参数配置
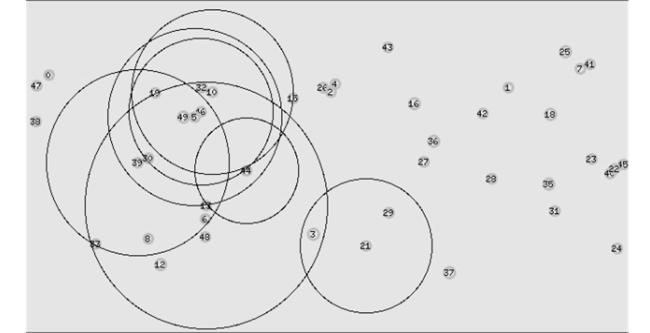
NS2是一种面向对象的、离散事件驱动的、完全免费的网络环境模拟器。仿真环境以国家桃产业技术体系西安综合试验站果园环境为参考,设置为500 m×500 m的区域,仿真时间为300 s,系统随机生成50个随机分布的节点,且每个节点以不同的移动速度在上述500 m×500 m的区域内,按照表1 设置的仿真条件,设置节点的移动模型为随机运动。农业机器人因作业任务不同,运动形式不同,其行驶速度也大不相同,如除草机器人行驶速度在0.45~1 m/s 左右[24],而喷药、施肥机器人的作业速度通常要比除草、采摘机器人、巡检机器人等要高[25,26],如大田农业自主行驶喷药机的行驶速度为3~8 m/s左右,空中无人机喷药的作业速度为1~10 m/s 左右[27]。为保证改进协议适用于高速作业的农业机器人,此处节点随机运动的移动速度的设置参考农业喷药机器人,速度在1~10 m/s。仿真结果如图5 所示。具体的参数配置见表1 。
4.2 仿真测试结果与分析
通过对比AODV和AODV-SP两种协议在路由发起频率、路由开销、平均端到端时延及分组投递率4个方面的性能差异,验证AODV-SP的改进效果。为保证结果的准确性,每个试验结果均为10次试验结果的平均值。
(1)路由发起频率。表示源节点发起的路由请求次数与仿真时间之比,用于表示网络的稳定性,其计算方法见公式(6) 。
(2)路由开销。网络中用于路由发现和路由维护的分组数与目的节点接收到的数据包个数之比,用于表示网络开销,其计算方法见公式(7) 。
(3)平均端到端时延。数据包从源节点到目的节点所需的平均时间,用于表示网络的实时性,其计算方法见公式(8) 。
(4)分组投递率。目的节点接收的数据包数与源节点发送的数据包数之比,用于表示网络的可靠性,计算方法如公式(9) 。
试验结果如图6 所示,引入了优先节点与路径信号强度阈值后的AODV-SP平均端到端时延、路由发起频率、路由开销三个指标均小于原始AODV,分组投递率较AODV有着明显提高。其中,当节点的移动速度为5 m/s时,AODV-SP的路由发起频率和路由开销较AODV分别降低了3.65%和7.09%;节点的移动速度为8 m/s时,AODV-SP的分组投递率提高了0.59%,平均端到端时延降低了13.09%。
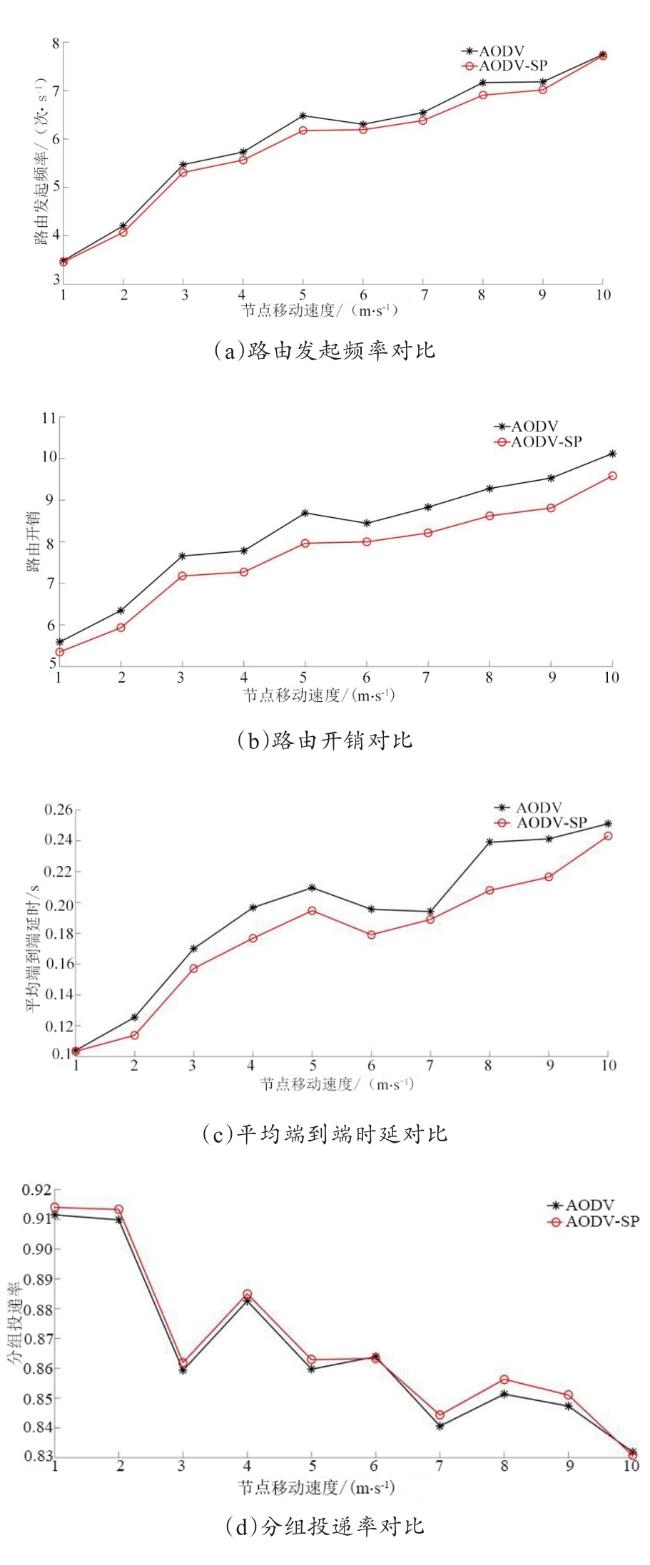
由于在AODV-SP的改进过程中引入了优先节点和路径信号强度阈值两个参量,使最终选择的路径更加稳定,不易断裂,故节点的不同移动速度下,AODV-SP低于AODV的路由发起频率(图6(a) )。当节点的移动速度为5 m/s时,AODV-SP的路由发起频率较原始AODV降低了4.73%。
在节点移动速度增大的同时,路由开销随之增加(图6(b) ),由于改进后的AODV-SP的路由更为稳定,降低了路由断裂的概率,使路由发现和路由维护的分组数减少,故节点的不同移动速度下,AODV-SP的路由开销低于AODV。当节点的移动速度为5 m/s时,AODV-SP的路由开销较原始AODV降低了8.38%。
节点的移动速度较低时,AODV和AODV-SP的平均端到端时延均较小(图6(c) ),在网络中节点移动速度增加的同时,平均端到端时延随之增大,而相同移动速度下AODV-SP小于AODV的平均端到端时延,其原因在于AODV-SP所建立路由的可靠性更高,节省了大量路由发现所需的时间。当节点的移动速度为8 m/s时,AODV-SP的平均端到端时延较原始AODV降低了13.09%。
网络中节点移动速度增加的同时,分组投递率逐渐降低(图6(d) ),由于AODV-SP所建立的路由有更好的稳定性,降低了路由断裂的几率,故相同移动速度下AODV-SP大于AODV的分组投递率。当节点移动速度为8 m/s时,AODV-SP的分组投递率较原始AODV提高了0.59%。
仿真测试结果表明,在传统AODV协议和AODV-SP协议下,农业机器人行驶速度越大,节点间路由发起频率、路由开销以及平均端到端时延随之增大,进而影响通信网络的稳定性和实时性;对应的分组投递率越来越小,说明通信系统的可靠性越差,易导致通信数据丢失。但相比传统AODV协议,AODV-SP协议在通信延时、能耗、路由断裂均有一定程度的改良。
5 AODV-SP性能物理平台测试
为进一步验证改进后的AODV-SP仿真结果在多机器人无线通信系统上的适用性,保证果园多机器人无线通信系统的正常运行,本研究选用了目前常用的基于领航-跟随法的多机器人运行模式,搭建了多机器人无线通信物理平台,并对该平台进行了通信测试。
5.1 多机器人无线通信物理平台的搭建
为保证多机器人无线通信物理平台的正常运行,基于领航-跟随法的多机器人运动方式,设计了多机器人无线通信物理平台的系统硬件和软件。其中领航机器人由遥控器控制,跟随机器人通过无线通信系统的信息交互,与领航机器的运动状态保持一致。
5.1.1 系统硬件选择
多机器人系统硬件选用基于ARM11架构的S3C6410处理器(飞凌OK6410-A开发板),并搭配SDIO Wi-Fi无线通信模块(FIT-WIFI-II_RTL8189ES)、GNSS模块(ATGM332D-5N)、超声波传感器(HC-SR04)、红外传感器(5 mm红外对管)和4.3寸LCD液晶屏(图7 )。其中Wi-Fi无线通信模块用于通信系统中的数据分组,GNSS模块用于获取机器人运行时的经纬度信息(通过坐标转换变为机器人横纵坐标),超声波传感器用于检测桃园跟随机器人的跟车距离,红外传感器用于保证车辆的跟车距离,LCD液晶屏可显示果园机器人的运行信息及指令信息。

5.1.2 通信系统软件设计
多机器人无线通信物理平台的通信系统软件主要包括根据AODV-SP 改进后的数据包的编写数据包可视化界面两部分。其中数据传输格式如表2 所示,除起始位和停止位以外,D0、D1、D3和COM分别代表本机的标识符(领航机器人设置为“0”,跟随机器人由“1”开始随数量递增)、IP地址、是否正常运行的状态和控制指令(前进、左转、右转、停止)。并采用Qt Creator设计了能实时显示该数据包的可视化界面,界面包括当前机器人的IP地址、运行状态、经纬度信息、跟车距离和其他机器人的当前状态等信息。设定无线通信系统的信息定时更新时间为100 ms,当系统初始化完成后会一直处于监听状态,若领航机器人接收到跟随机器人发送的数据包后,会提取数据并判断是否包含异常停车指令,出现异常则停车等待,反之则发送控制命令并继续进行监听。
表2 通信系统数据包格式Table 2 Data packet format of communication system |
| 单位:bit | ||||||
|---|---|---|---|---|---|---|
| 起始位 | D0 | D1 | D2 | D3 | COM | 停止位 |
| 8 | 8 | 8 | 16 | 8 | 8 | 8 |
5.2 AODV-SP测试
丢包率及通信链中断情况是衡量果园多机器人通信系统的重要指标。通过网络丢包率和物理平台测试,分别验证了在实验室环境下,多机器人静态和动态两种状态下,基于AODV-SP的多机器人无线通信物理平台数据包丢失、通信链中断的实际情况。
5.2.1 静态丢包率测试
桃园株距约为2 m,行距约为4 m,Wi-Fi通信模块的最大有效通信距离为105 m,为保证领航机器人通过Wi-Fi模块能与跟随机器人建立连接,参考桃园环境和多机器人的运动方式(图1 ),将网络丢包率为0时对应的通信距离(25 m)作为丢包率测试的初始距离,测试间隔距离为5 m,最大通信距离为100 m。
每次测试过程中,领航机器人发送400组数据,通过记录跟随机器人端接收到的数据个数即可求得网络的丢包率。通过测试结果可知节点相距25 m时多机器人无线通信物理平台的丢包率为0,100 m时丢包率为21.01%,可用于桃园多机器人协同作业(表3 )。
表3 多机器人在Wi-Fi网络下传输数据的丢包率Table 3 Packet loss rate of data transmission by multiple-robots in Wi-Fi network |
| 距离/m | 丢包率/% | 距离/m | 丢包率/% |
|---|---|---|---|
| 25 | 0 | 65 | 1.82 |
| 30 | 0.27 | 70 | 2.74 |
| 35 | 0.31 | 75 | 4.36 |
| 40 | 0.65 | 80 | 6.54 |
| 45 | 0.61 | 85 | 13.45 |
| 50 | 0.74 | 90 | 10.81 |
| 55 | 1.38 | 95 | 17.48 |
| 60 | 0.77 | 100 | 21.01 |
5.2.2 多机器人通信系统动态测试
为测试多机器人无线通信物理平台其系统动态时数据丢失、通信链中断的实际情况,首先为物理平台领航机器人A、跟随机器人B和跟随机器人C自动分配IP地址,并将端口手动设置为9000;其次根据红外传感器有效检测范围,将机器人间相对距离设置为40 m,然后使通信物理平台的机器人按照链状拓扑结构运行,即机器人按照编号顺序,沿直线依次遍历前一个机器人走过的位置(图8 )。
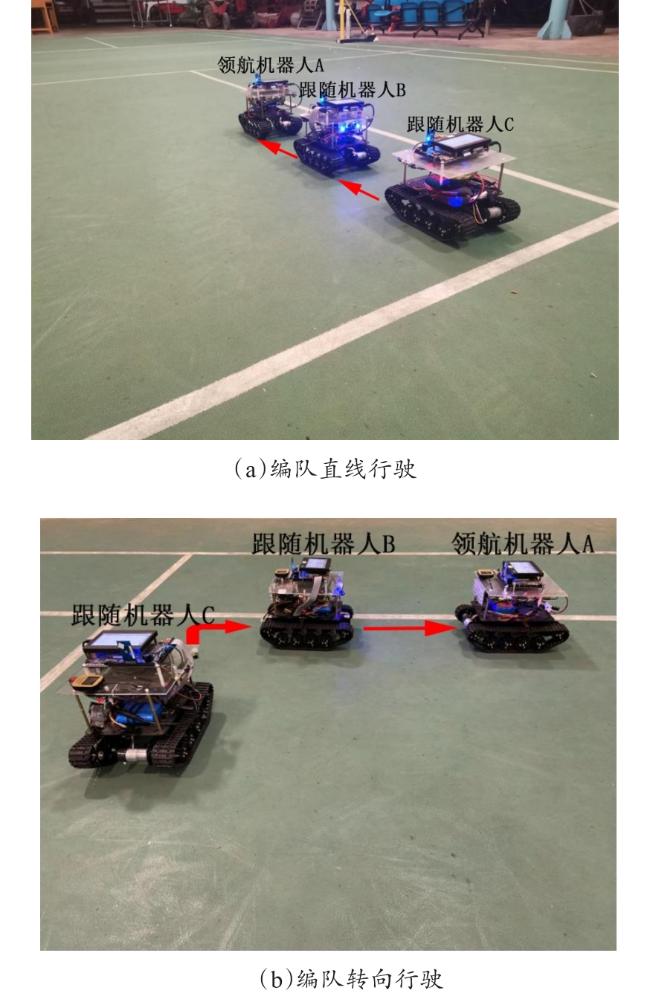
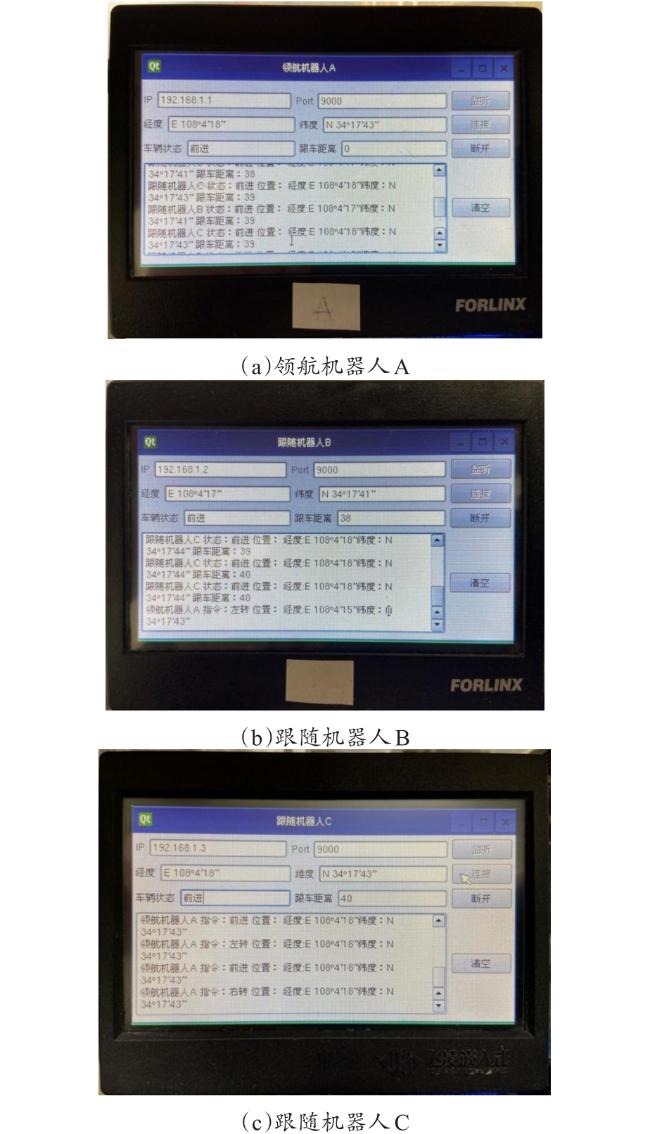
先通过遥控器向领航机器人发送控制指令,领航机器人A接收到控制信号后,在执行控制指令的同时会不断根据自身状态更新数据包中的经纬度、控制指令等信息,并发送至跟随机器人。跟随机器人B和跟随机器人C会根据接收到的数据包解析并执行其中的指令,并定时更新数据包中的经纬度、运行状态和跟车距离等信息。其中跟随机器人B向领航机器人A发送数据包,跟随机器人C向领航机器人A和跟随机器人B发送数据包。如图9 可视化界面所示,在多机器人运动时,各多机物理无线通信平台能实现双向通信,且跟随机器人能根据控制指令完成编队直线和转向行驶。试验结果表明,AODV-SP可用于多机器人无线通信物理平台。
6 结 论
本研究针对多机器人在桃园内作业时的通信需求,基于Wi-Fi信号在桃园内接收强度预测模型,在路由发现阶段引入优先节点和路径信号强度阈值参量为路由请求考虑因素,提出了一种AODV-SP,并通过NS2仿真对现有AODV和改进后的AODV-SP进行了对比分析试验。仿真试验结果表明,改进后的AODV-SP在路由发起频率、路由开销、平均端到端时延及分组投递率4个方面均优于AODV,其中当节点的移动速度为5 m/s时,AODV-SP的路由发起频率、路由开销较AODV分别降低了3.65%和7.09%;节点的移动速度为8 m/s时,AODV-SP的分组投递率提高了0.59%,平均端到端时延降低了13.09%,能有效提高无线通信网络性能。
为进一步验证AODV-SP的实用性,在搭建的基于领航-跟随法多机器人无线通信物理平台上,测试了基于AODV-SP的无线通信系统丢包率大小和通信系统在物理平台上的传输性能。试验结果表明,AODV-SP用于基于领航-跟随法的多机器人,可通过互相通信维持链状拓扑结构的运动状态。
为保证本研究提出的AODV-SP通信系统能用于果园多机器人协同作业,后续研究还需要考虑节点的运动状态对路由的影响,并将通信系统移植到在果园作业的机器人上,在实际果园环境中进行进一步测试。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}