



1 引 言
随着农业现代化的发展,当前中国农机装备水平以及农业机械化水平已逐渐无法满足农业高质量、高效率、低成本发展的要求。以智慧农业为代表的新技术正在世界范围内引领现代农业的发展方向。智慧农业以数据、知识和智能装备为核心要素,将互联网、物联网、大数据、云计算、人工智能等现代信息技术与农业深度融合,实现农业生产信息感知、定量决策、智能控制、精准投入及个性化服务,其具体实现途径是无人农场[1]。2017年,英国Harper Adams大学进行了小麦全程无人生产的实践,成为世界第一个无人农场的应用范例,该无人农场通过应用无人驾驶拖拉机、无人打药机、无人收割机等智能化农机装备,完成了小麦耕、种、管、收全程无人化生产[2]。中国在近几年也开展了小麦、玉米、水稻等大田无人农场以及蔬菜、果园、畜牧等领域无人农场的技术探索及实践,积累了一定的经验[3]。如北京市农林科学院智能装备技术研究中心围绕小麦、玉米、水稻等主粮作物的无人化生产开展了长期研究与产品研发,突破了农机自动导航、精准作业、农机作业监测等关键技术,创制了无人化耕整地、播种、施肥、施药、收获等智能农机装备,并在上海、吉林、内蒙古等地建设了多个无人农场,实现了农机耕种管收全程无人化农机作业。随着劳动力资源紧缺、农业生产成本逐年提高等问题的不断加剧,无人农场在世界范围内受到了广泛认可,世界多个发达国家和地区相继开展了以无人农场为具体形式的智慧农业的研究与实践,并制定了相应的发展计划。无人农场是中国发展现代农业,成为农业强国的关键支撑。
本文通过梳理无人农场在信息感知与决策、自动驾驶、精准作业、无人化农机装备及作业管控技术的研究进展与问题,分析发展中国无人农场亟待解决的关键技术问题,为中国无人农场的发展提供思路。
2 大田无人农场关键技术
2.1 大田无人农场总体架构
无人农场以数据和信息为基础支撑,通过自动分析与决策,指导无人化农机装备全自动、全覆盖、高质量、高效率地完成农业生产活动。一般情况下,无人农场总体系统架构如图1 所示。
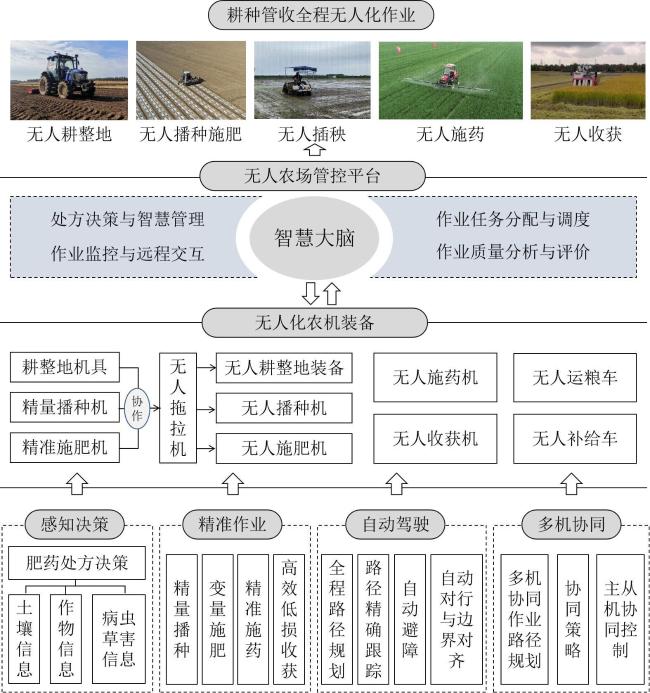
无人农场通常包括感知决策、精准作业、自动驾驶和多机协同4种核心关键支撑技术,覆盖“耕种管收”全程作业的无人化农机装备,以及支撑无人农场智能决策、任务分配与调度、作业监管与作业分析评价的信息化平台,其核心是智慧大脑。作为构建无人农场的关键支撑技术,信息感知与决策重点是通过获取农田土壤、作物、病虫草害等信息,并对信息进行融合分析,确定土壤和作物缺墒、缺肥、缺营养元素,以及病虫草害严重程度等情况,进而决策出施肥处方和施药处方;精准作业技术围绕农业耕种管收各个环节,根据农艺要求以及决策处方,利用精量播种机、精准施肥机和喷药机等将种、肥、药按质按量施用到地里,在作物收获阶段能够根据作物属性和收获质量等信息对收获机作业工况进行智能调控,实现低损高效收获作业;自动驾驶技术主要解决农机装备在田间自动行走的问题,包括农机作业路径规划、路径跟踪、避障、地头转弯掉头等;多机协同主要解决无人场景下多台农机同步或协同作业的问题,目前比较典型的作业场景有收获机与运粮车协同、多台农机同时开展同类型作业时协同分配任务并规划作业路径、无人播种施肥装备与补给车之间协同。无人化农机装备将信息感知、精准作业、自动驾驶与多机协同控制相关技术集成到农机装备上,使其具备在无人参与情况下自主完成耕种管收全程作业的能力,是构建无人农场较为关键的物质基础。无人农场信息管控平台是无人农场运转的总指挥,其将气象、农田环境、作物、农机等各类信息进行汇总,然后决策出农机最佳作业时间、最合理任务分配、最优作业路径以及种肥药作业处方等,无人化农机装备基于管控平台的决策信息与指令开展农业生产,并将作业信息反馈到平台,平台根据农机作业数据进行作业质量的分析与评价,并结合异常情况对农机作业任务进行优化和调整。
2.2 大田无人农场的信息感知与智能决策技术
2.2.1 精量播种信息感知与处方决策
精量播种是大田无人农场的关键技术之一,与传统播种方式相比,在播种过程中,整个地块不再是恒定不变的播种量,而是根据不同地块的增产潜力情况,适度增加或减少播种量,使种子可以充分利用土壤的养分、光照、蓄水能力等条件发育[4]。为了更加准确地指导精量播种,需要快速获取播种种床的土壤环境信息,从而为播种决策和控制提供实时的理论依据。土壤的环境信息通常包括土壤墒情、土壤电导率、土壤有机质等参数,为了获取上述信息并确保控制系统可以有足够的数据处理时间,通常在播种机前端设计安装实时传感器实现数据的获取。当前国内外学者在单一参数实时传感器研究方面已经取得了一定的进展和突破,但主要以单一传感器研究为主,在多源数据融合处理研究方面尚存在不足[4]。
土壤墒情反应土壤含水率的多少,土壤墒情的高低决定种子生长环境的优劣,一定程度上影响其后期出苗率。国内外学者在土壤墒情原位监测方面取得了许多研究成果,采用的方法有电阻法、频域反射法(Frequency Domain Reflectometer,FDR)、时域反射法(Time Domain Reflectometry,TDR)、中子法等。但是,采用原位监测技术无法满足播种决策的快速响应需求。近几年,部分学者开展了车载式土壤墒情在线监测装置,可在播种时实时获取当前土壤含水率,从而为后续播深、播种间距的控制提供理论依据。张东兴等[5]设计了一种可见光近红外式土壤水分传感器,实现了对播种沟土壤水分的在线测量。朱文静等[6]针对探针式土壤水分传感器插入土壤后因反馈点固定而需大量布点、成本高、破坏耕层等问题,研制了一种基于法布里-珀罗干涉近红外传感器的非接触式土壤墒情在线检测系统。Weatherly和Bowers[7]采用电阻法检测原理,开发了土壤墒情在线感知传感器,为玉米播深调控系统提供决策依据。Price和Gaultney[8]、Mouazen等[9]均采用近红外光谱法的检测原理,设计了土壤含水率在线测量仪,实现了田间作业时对土壤含水率动态实时检测,用于指导玉米播种深度。
土壤电导率是评价土壤生产力的一种常用参数指标。土壤电导率的测量通常采用电流-电压四端法原理,近些年,国内有学者开始从事车载式土壤电导率检测系统的研发工作。杨玮等[10]、杨文奇[11]均基于电流-电压四端法的测量原理,设计研发了车载式土壤电导率快速检测系统,该系统可以快速预测土壤浸出液电导率的分布趋势,为播种作业提供参考。国外对车载式土壤电导率传感器的研究相对较早,目前部分产品已经商用化,比较有代表性的有Geonic Limited公司[12]的EM38-MK2和Veris Technologies公司[13]研制的Veris 3150型土壤电导率传感器。车载式大田土壤电导率快速检测系统如图2 所示。

土壤有机质是评价土壤肥力水平的常用指标之一,基于土壤的有机质信息指导变量播种作业是一种较为常用的做法。国外在土壤有机质传感器方面取得了较为深入的研究,部分产品已经实现商业化应用。普渡大学的Ess[14]设计了一款基于光电式传感器的土壤有机质传感器,该传感器基于土壤中有机质含量的不同会造成反射的光谱频段值不同这一原理确定土壤有机质的含量。Precision Planting公司[15]开发的SmartFirmer传感器可同时发射和接收X射线、可见光谱、无线电波三种光线,通过分析三种光线的特征即可得到土壤的有机质含量信息。国内目前在车载式土壤有机质传感器的研究方面还较为缺乏,已有研究多集中在模型构建以及便携式速测仪的研发。例如,唐海涛等[16]、Xie等[17]借助近红外光谱技术,针对不同种特定情况,分别采用不同的特征波长提取算法,构建了土壤有机质含量预测模型,该算法为土壤有机质含量的在线预测提供了理论依据。崔玉露等[18]基于光谱学原理设计了一款便携式土壤有机质检测仪,仪器测量值与标准值的相关系数R 2达到0.891。
虽然用于土壤环境信息监测的传感器类型较多,但受限于播种作业过程中传感器安装空间紧凑、数据响应延迟的影响,当前难以实现多类型土壤传感器的同时检测,而且缺乏地块往年产量、当年气象信息等数据的支撑,使得在线式土壤传感器难以全面综合地决策播种作业,目前基于实时土壤传感器的变量播种控制系统在国外的使用率也相对较低。相应地,采用处方图指导变量播种作业仍然是最常用的一种变量播种方式。关于变量播种处方图的生成,美国已经形成了一个成熟的商业化服务系统,其中,CASE公司、Topcon公司、Ag Leader公司等也在变量播种处方图的决策和生成方面形成了许多技术服务。与发达国家相比,国内在变量播种决策方面的研究尚且处于起步阶段,已有研究多基于播种机前进速度进行播量控制[19,20],其研究重点多集中在控制系统上,较少涉及播种决策方面研究。
2.2.2 精准施肥信息感知与处方决策
精准施肥涉及到信息感知、处方决策与精确控制等多项关键技术。国内外关于作物氮素诊断方面做了大量研究工作,国外市场上几种代表性获取作物营养的传感器,包括美国俄克拉荷马州立大学和N-tech公司研制的GreenSeeker(660 nm,780 nm),美国Holland公司研制的RapidSCAN CS-45(670 nm,730 nm和780 nm)等。杨贵军等[21]、孙红等[22]、林维潘等[23]分别研发了作物长势监测仪CropSense(650 nm,810 nm)、双波段(650 nm,850 nm)主动光源叶绿素含量检测传感器、便携式三波段(660 nm,730 nm,815 nm)以及作物生长监测仪CGMD303,可获得归一化植被指数(Normalized Difference Vegetation Index,NDVI)、叶面积指数(Leaf Area Index,LAI)、植被覆盖度(Fractional Vegetation Cover,FVC)、叶绿素含量等指标。矫雷子等[24]和周鹏等[25]分别采用激光诱导技术测定土壤氮素、近红外光谱技术检测土壤氮素。
2.2.3 精准施药信息感知与处方决策
精准施药的核心是获取农田小区域内病虫草害差异性信息,采用变量施药技术,按需施药。病虫草害信息实时获取技术主要包括基于光谱、图像和光谱成像3种,分别适合防除作物出苗前的杂草、行间杂草和行内杂草。基于光谱方法,国外已有WeedSeeker、Weed IT等杂草传感器[30];基于图像方法,国外已有Autopilot、CamPilot、Robocrop等视觉导航产品;基于高光谱成像方法,潘冉冉等[31]结合化学计量学方法实现了对油菜中的杂草的分类识别。病害识别也已有较多成果,周巧黎等[32]基于改进轻量级卷积神经网络MobileNetV3对番茄叶片病害进行了识别;REDDY和REKHA[33]基于迁移学习的深叶病害预测框架(Deep Leaf Disease Prediction Framework DLDPF)实现了叶片病害自动检测;Bravo等[34]采用光谱反射数据对小麦黄锈病进行了早期诊断;Liu等[35]利用BP神经网络实现了对4个等级的水稻稻穗病害分类。在病虫草害检测基础上,结合土壤、气象、管理等多源异构数据,采用随机森林、人工神经网络等机器学习算法,建立了作物生长状态诊断模型与施药处方决策模型,融合多源数据和知识规则生成田块尺度施药处方。
综合国内外在大田无人农场的信息感知与智能决策技术方面,国外种肥药关键信息在线感知技术研究较为系统,已推出了面向种肥药精准施用决策的多款在线感知传感器商品,国内多以集成应用国外传感器为主,在传感器组合和决策模型的适应性上都受到了限制。国内科研团队也自主研发了部分土壤、作物传感器,并在不同地区初步开展了不同作物的精准施肥和精准施药的决策模型研究,随着传感技术和决策模型的完善,国内自主研发的传感器将在精准作业过程中发挥出更大的作用。
2.3 无人农场精准作业技术与装备
精准作业是按照农艺需求或处方决策对作物生长所需的种、苗、肥、药等农资精量投放到特定位置的作业过程。按施用农资的不同可分为精准播/栽、精准施肥和精准喷药。
2.3.1 精准播/栽技术作业技术与装备
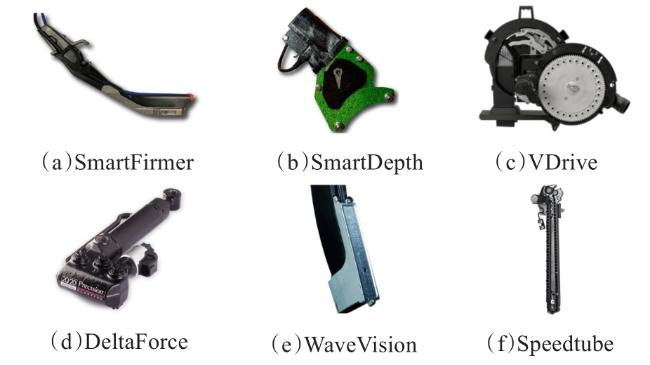
(1)单粒精量穴播是播种机按均匀的株距、稳定的播深和一致的行距将单粒种子播入土壤的过程,主要针对玉米、大豆、棉花等需要单粒精量播种的作物。为了实现播种机的无人作业,传统机械式播种机的关键作业部件包括排种器、导种管、播种深度调节、下压力控制、覆土镇压等机构均进行了智能化改造。Precision Planting、Kverneland等公司代表着单粒精量穴播的国际先进水平,实现了播种机排种器的电机驱动控制、播种深度的智能无级调节、下压力的液压/气动调控、作业质量监测等一系列功能。Precision Planting研发的SmartFirmer(图3(a) )可实现种沟内水分、温度、有机质含量等参数的实时监测;SmartDepth(图3(b) )可以在人机交互终端通过电机实现播种深度的快速无级调节;VDrive(图3(c) )采用电机周向驱动的方式,实现了排种器的精准控制;DeltaForce(图3(d) )可实现播种单体下压力的快速检测和基于液压的实时控制;WaveVision(图3(e) )排种检测传感器,具有强穿透性和高防尘功能; Speedtube(图3(f) )通过隔板传送带实现了种子从排种器到种床的平稳有序输送[38]。Kverneland公司在排种器电机驱动基础上,结合卫星定位技术,实现了种子横向和纵向的精准控制,可播种品种苗[39]。中国在播种机智能化改造方面也进行了开创性研究,He等[40-42]探索了电机驱动排种技术,利用直流电机驱动排种器,在12 km/h的高速播种作业条件下,排种单粒率可达到98.4%,在此基础上探索了基于处方图的变量播种技术。
(2)定量均匀条播是播种机按照作物所需播量将种子均匀播撒到深浅一致土层的过程,主要针对小麦和直播的水稻,基本要求是播量精确、下种均匀、深浅一致。条播机根据种子输送方式的不同,分为机械式和气力式,机械式采用不同曲线或形状的外槽轮式排种器为主要种子分配部件,气力式主要采用气送式集排器为种子分配部件,多用在大型播种机上。Amazone的Cataya系列条播机(图4(a) ),是耕整地和播种联合作业机,采用外槽轮式排种器,可实现播量快速校准和高精度控制,播量控制误差≤1%;Avant系列播种机(图4(b) )配备气送集排器,种子分配均匀,配合智能人机交互终端可实现区段控制功能。国内配备外槽轮式排种器的条播机与国外产品具有相同的工作原理,但在可靠性和作业精度上存在一定差距。针对气送式集排器,雷小龙等[51]采用气固两相耦合等方法,优化设计一种小麦油菜兼用型气送式集排器,排种油菜、小麦的各行排量一致性变异系数分别低于4%和5%,总排量稳定性变异系数和种子破损率分别低于1.0%和0.1%。张晓辉等[52]设计到气力集排器排量稳定性变异系数低至1.01%~1.19%,播种小麦效果良好。另外,中国独有的小麦宽幅精播技术因其良好的节种增产效果被广泛应用,主要通过优化导种管和均布器结构实现种子宽幅均布。

(3)移栽方式是将适龄作物秧苗依据所需穴株数按农艺要求的栽植深度和株距要求插入土壤。大田作业主要是指水稻插秧移栽,基本要求是保证所插秧苗“浅、直、匀、齐”。目前主流插秧机以Kubota、ISEKI、Yammar等日本品牌为主(图5 )。近年,中国插秧机也有了突破性发展,适合中国国情的各类插秧机逐步实现了国产化,苏州久富、沃得、星月神等国产化插秧机不断突破,可实现穴距、插秧深度、横向取禾次数、纵向取禾深度等作业参数的多级调节,适合不同品种和尺寸的秧苗。

2.3.2 精准施肥作业技术与装备
精准施肥是指通过农田作业装备对化肥实施精准投入,准确控制化肥的精量、定位施用。按照作业过程可以分为施肥量标定、精量施肥控制和施肥智能监测。
施肥量标定的目的是为了确定施肥器每转施肥量,标定后的结果作为精准施肥控制的基础。为了快捷高效开展施肥量标定,袁文胜等[53]设计了一种基于称重传感器的闭环施肥量快速标定装置,以称重传感器与目标施肥量的差值为输入,调整施肥轴驱动电机转速使施肥量达到目标值,从而计算每转施肥量。
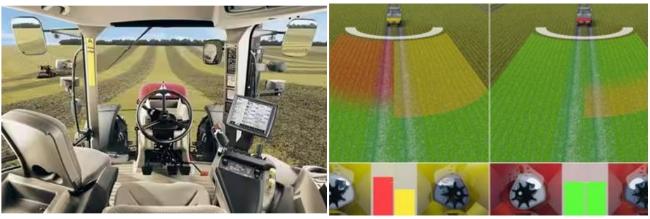
变量施肥依据土壤养分空间区域分布状况、作物需肥规律、目标产量等,按区域调节施肥比例和施肥量,包括基于处方图的变量施肥和基于实时传感器的变量施肥。国外已研制出相应变量施肥产品。美国Case IH公司设计了一套精准农业地理信息系统——AFS(Advanced Farming Systems),在其生产的ST820型变量施肥播种机上,可以将由AFS软件生成的处方图存入变量控制器中,控制变量施肥作业(图6(a) )。法国KUHN公司的Axis系列悬挂式变量撒肥机,配置了自动调节撒肥量的EMC控制系统,可实时调节撒肥盘开度与角度,实现高效变量撒肥作业(图6(b) )。Zhang等[58]设计了一种滞后时间检测系统,并采用基于平面坐标的滞后距离补偿方法来减小滞后时间,试验结果表明,该方法能有效减小变速施肥机的滞后距离。受限于实时传感器的性能,基于实时传感器的变量施肥技术还处在研究阶段。但随着遥感技术的发展和基于遥感技术的施肥决策模型研究的深入,基于遥感技术的无人机变量施肥或将成为一个突破口。
2.3.3 精准施药作业技术与装备
精准施药核心在于获取农田小区域内病虫草害的差异性,采用高效喷雾技术和变量施药技术,按需施药。
目前高光谱、可见光等技术是农田病虫草害识别的主流技术,从功能上已经基本实现了病虫草害的识别。孙文斌等[62]提出了一种基于可见光谱和改进注意力机制的浅层农作物病害识别模型,设计了新的注意力模块SMLP和农作物病害识别模型SMLP_ResNet,采用数据集AI Challenger 2018和Plant Village验证,病害识别率分别为86.93%和99.32%。Tronthmanna等[63]指出多特征融合技术的发展在一定程度上提升了杂草识别率与稳定性,如使用激光雷达与光谱成像相结合,从植被水平与垂直结构全方位了解作物信息。Cao等[64]提出采用高光谱、近红外、激光雷达等多样化数据设备,结合迁移学习算法、数据增强方法和深度学习网络等先机数据处理方法,实现了对农作物病虫害的精准识别。但是因为田间光照、作物交叠等复杂多变的条件,上述技术距离实际应用仍存在一定距离。
主流的精准施药仍以全区域均匀喷洒为主,主要依赖牵引式/悬挂式喷杆喷雾机、自走式喷杆喷雾机和航空植保机实现。国外如法国KUHN、丹麦HARDI等企业的精准喷药机可实现加药、喷洒、搅拌、冲洗主罐等功能,喷头调节、喷杆控制、变量喷施、智能监控等先进技术已广泛应用,可实现全区域农药精准喷施。KUHN公司的SprayKit[65]将喷药设备与除草设备结合,实现了机械除草和化学防控的融合。HARDI公司的MEGA系列[66]喷雾机引入SmartCom数组平台,实现喷雾机的监测诊断和控制,提高作业效率和作业精度。国内针对上述技术开展了广泛的研究,Chen等[67]研发了一种基于空气悬架的高度稳定性滑膜控制系统,可改善因药液减少造成的自走式喷雾机喷杆高度变化。张春凤等[68]针对精准对靶喷药系统作业中由于不同数量喷头反复启闭造成管路压力波动问题,开展了对靶喷药系统回流比例对管路压力波动影响的研究,为精准对靶施药装置的进一步优化提供支撑。Jeon等[69]采用超声传感技术测量植物冠层与喷嘴距离,辅助实现变量喷雾,试验表明,优化超声传感器与喷嘴相对位置可以改善测距精度。Wei等[70]研发了一种基于Pulse-Width-Modulation(PWM)控制的变量喷雾系统,喷药流量从最大调至最小过程中,雾滴直径变化量不超过10%。Wen等[71]构建的流体动力学模型可以高精度还原四旋翼无人机在喷药过程中雾滴漂移与沉积情况,为植保无人研究提供良好理论研究基础。
中国企业在精准喷药领域形成了众多符合中国国情、具有自主知识产权的产品,在国内具有较高认可度。巨大的市场需求驱动下,以电动多旋翼植保无人机为主的航空植保机械在中国快速发展,成为高秆作物、水田、丘陵山地等场景下植保作业的有效方式,是地面喷药机械的有效补充。一键起飞、自主路径规划、精准施药控制、自动绕障、仿地形飞行等先进技术在植保无人机上快速迭代,推广应用。综合国内外精准作业技术的研究,在精准作业监测与控制技术上国内外均有广泛研究及成熟产品的应用。在处方生成和智能决策方面,无法快速、准确、低成本地获取地块种肥药处方图,缺乏准确制定基于实时传感器决策模型的数据和理论基础,是限制精准作业技术发展的瓶颈,也是未来精准作业技术创新发展的突破口。
2.4 自动驾驶技术
2.4.1 自动驾驶环境感知技术
自动驾驶的环境感知是服务于农机自主行走的农田环境感知技术,主要包括对农田地块边界的感知、作物行的感知和田间障碍物的感知。
农田物理边界的信息感知主要是对农田在耕种过程中人为或自然形成的耕地边界的检测,可为自动驾驶确定起始行、转弯掉头处和结束行,对确定农机自动驾驶的作业范围具有重要意义。常用的农田地块边界检测方式主要有基于全球卫星导航系统(Global Navigation Satellite System,GNSS)高精度定位的检测、基于遥感方法的检测和基于车载视觉信息的检测。目前在自动驾驶中应用最多的地块检测方法是采用GNSS的预先定位检测方法,基于遥感影像的大面积地块边界提取和车载传感器的实时检测仍处于研究阶段[72-75]。刘东等[76]通过无人机获取农田多光谱数据,基于不同区域NDVI值的差异,采用大津阈值法实现农田分割。Zhang等[77]采用无人机搭载图像和GNSS定位传感器拼接得到完整农田地图;王侨等[78]和乔榆杰等[79]基于农田内外像素灰度的跳变等图像处理方法判断地头出现的准确率在96%以上,地头边界线的检测准确率在92%以上。阚韬和辜斌[80]发明了一种农田边界检测方法及装置,通过获取待检测图像并进行第一干扰降低处理以得到第一图像,对第一图像进行边界处理以得到第二图像,对第二图像进行第二干扰降低处理从而得到农田边界图形。
作物行的感知是确定农机自动驾驶每个作业行路径的基础。对于无作物场景的农机自动驾驶作业,如耕整、播种环节,确定作物行主要采用GNSS高精度定位数据生成作业行线,对于苗期田间管理的作物行感知主要采用基于车载传感器如图像等的实时感知。姜国权等[81,82]采用基于图像特征点提取并对特征点进行粒子群聚类的小麦行检测算法,识别率达95%。孟庆宽等[83]提出一种基于线性相关系数约束的玉米中心线检测方法,当速度为1.2 m/s时,最大横向偏差不超过7 cm。王侨等[84]根据垂直间距、趋势角和覆盖宽度等特征参数聚类并用最小二乘法拟合得到玉米苗期的多条作物行线。Choi等[85]提出了利用叶片通常朝着中心茎区域的方向会聚的形态学特征来识别水稻植株的中心区域的方法。Hu等[86]提出了一种利用激光雷达数据识别水稻作物行的方法,最大平行度为45 mm,最大中值偏差为7 mm。Zhai等[87]提出了一种基于双目视觉的多作物行检测算法,检测正确率大于92.78%。Gasparino等[88]提出一种摄像机和二维激光雷达融合的玉米行检测方法,其有64.02%的误差在5 cm以内。
田间障碍物的感知是农机自动驾驶安全作业的基础。常用的障碍物检测传感器有视觉、激光雷达、毫米波雷达、红外相机和超声波探测器等,目前,基于视觉和激光雷达的田间障碍物检测准确率不断提高,近几年成为研究热点。Yang和Nocuchi等[89]采用全向立体视觉重建场景中人的位置,实现田间行人检测,障碍物的检测均方差小于0.5 m。Li等[90]基于深度学习卷积神经网络,实现水稻收获环境下不同姿势状态行人的检测,平均处理速度为32.2帧/秒,障碍物检测的平均成功率为96.6%。尚业华等[91]提出了基于欧式聚类的三维激光点云田间障碍物检测方法,田间行人在30 m内平均检出率为96.11%。郎朗等[92]提出采用LiDAR(激光雷达)技术对农田地形进行重建,设计了车载农田地形重建系统,平整前后所重建农田地形和原始农田地形点云数据的投影面积逼近度为93%以上。Zeng等[93]研究了基于几何特征的网络结构苹果园稀疏三维点云的语义分割方法,创建了树冠密度和深度图,对树冠的格子线、支撑杆和树干分割的准确率分别为88.6%、82.1%和94.7%。Rovira-mas等[94]使用双目立体相机对站立在田间的人进行检测,试验表明在0.3 ~2.9 m范围内该方法可以有效检测到障碍物,且检测精度随车辆与障碍物距离的增加而减小。Yin等[95]使用3D相机采用基于二维直方图的聚类算法,将障碍物像素反投影到地平面上,用于图像分割和分析实时检测田间的人,试验表明静态条件下的定位精度平均误差为5.6 cm,移动情况下的距离检测误差为7.1 cm。
2.4.2 无人化农机路径规划方法
近年来,因全覆盖作业相较于手动作业主观判断的作业方式,具有降低路径重复率、提高作业质量与效率的优势[101],在耕作、喷药、施肥、收获等领域进行了广泛的研究与应用。如华中农业大学罗承铭等[102]提出全覆盖作业路径规划算法对油菜联合收获机作业路径进行规划,减少了非作业路径长度。但是,由于农田作业环境复杂,大部分田块为不规则地块,全覆盖路径规划存在重复率高、无法覆盖整个区域等问题,且农机作业过程需考虑最优作业路径、避障以及绕障等特定的作业场景,单一的路径规划算法无法满足农机自动驾驶需求,国内外采用多种算法结合的方式进行作业区域的全覆盖路径规划算法优化[103] 。Khan等[104]基于未知区域提出在线牛耕运动结合双向邻近搜索算法的优化回溯机制,实现完全覆盖路径规划。Liu等[105]提出了一种启发式模板结合贪心准则的回溯机制实现全覆盖路径规划方法。
针对农田地头转弯、掉头等路径规划需求,相关学者多从机具自身运动属性结合田块特点,对地头转弯局部路径算法进行设计优化,以达到最好的地头转向效果。袁加红[106]以插秧机为研究对象,设计了五种转向方式,作业时根据作业间距和机械的最小转弯半径的关系对转弯方式进行选择。Wang和Noguchi等[107]提出了Circle-back转弯方式,并以对行精度、地头宽度、非作业行驶距离等约束条件为优化目标设计了环境自适应的地头转弯路径规划和控制方法。基于该方法的无人驾驶拖拉机在转弯的效率和对行精度上都有明显提升。翟卫欣等[108]研究设计了一种基于区块套行作业模式的路径规划方法,作业区域内的四边形地块适应性、无人驾驶农机适应性和农田作业路径完整规划等问题得到了有效解决。
2.4.3 路径跟踪控制技术
在规划好作业路径的前提下,农机自动导航系统通过实时采集传感器信息的方式获取车辆状态信息,如位置、航向等姿态信息,以及速度、加速度等运动学信息,利用运动学或动力学建模结合所选路径跟踪控制算法计算并获得车辆运动控制参数,如车速、转向轮转角等,最终达到使车辆可以自动跟踪由规划算法得到的轨迹路线的目的。农机自动导航作业过程对规划路径的跟踪效果直接影响作业质量和效率。目前,农机自动导航路径跟踪方法主要包括PID算法、模型预测控制算法和纯跟踪控制算法等[109]。
PID算法是一种基于反馈误差的控制方法,不需要对被控制对象建模,原理简控制性能良好。如日本国家农业研究中心的Nagasaka等[110]以农机当前位姿与期望路径之间的横向偏差和航向偏差为输入,设计比例控制器,根据不同的横向偏差设置比例参数,求解车轮转向角,实现直线跟踪。由于PID控制参数受外界环节以及车身状态影响较大,参数的调整过程耗时严重,影响作业效率,单一PID控制方法无法满足农机自动驾驶作业需求,针对该技术瓶颈,许多学者应用改进的PID控制器对轨迹追踪进行了研究。Netto等[111]设计了一种加入了反馈机制的PID结合视觉导航的控制方法,实验表明在大曲率的路径上可以保证良好的跟踪性能。Al-Mayyahi等[112]提出基于粒子群算法的分数阶PID控制器,将跟踪偏差的平方和作为粒子群算法的适应度评价函数,求解最优的控制器参数,提升了算法的鲁棒性。
模型预测控制算法(Model Predictive Control,MPC)通过对当前模型进行预测,并对其进行滚动优化和反馈校正算法控制,以达到控制目标的目的[113]。近年来,国内外学者基于MPC算法结合农机实际作业情况对农机路径跟踪控制算法进行了设计及优化,对路径跟踪控制精度有了一定程度的提高[114]。如张万枝等[115]在分析PID路径跟踪控制算法的基础上,为进一步提升农业车辆导航路径自动跟踪精度,设计了一种基于线性时变模型预测控制的路径跟踪算法,该方法将农业车辆非线性运动学模型进行了线性化与离散化处理,以系统控制增量为状态量作为目标函数,将目标函数求解转为带约束的二次规划问题,实现了优化控制。
在农机自动驾驶路径跟踪领域,纯跟踪算法以其简单、易实现的特点,得到了广泛应用。该算法利用几何关系,计算农机到达指定位置所需走过的圆弧路径,进而获得车身运动控制参数,以实现路径跟踪的效果。然而,农机作业环境复杂,作业过程常伴随自身定位的偏差及波动,车辆系统在传统的基于几何模型的跟踪控制中不易进行几何路径的调整,基于该现状,相关学者对纯跟踪系统的相关算法进行了优化。Wang等[116]提出一种改进纯追踪模型的农机路径跟踪方法,采用速度自适应的前视距离,有效提高了无人农机高速作业时的导航精度。
2.4.4 作物对行与边界对齐控制技术
稻麦收获边界对齐控制是农机自动驾驶系统在作物收获环节的一个特殊场景,由于稻麦收获时一般不需要对行作业,其主要的工作路径为使割台边界沿着作物边界行走作业。目前关于稻麦收获边界对齐控制的研究主要有收割边界的检测和自动对齐的控制两方面。收获环节的作物行感知以图像和二维激光雷达检测为主,Wu等[117]根据已收获与未收获区域颜色特征确定候选点,提出了改进随机Hough变换的收割直线检测算法,算法可有效检测出直线,处理时间在200 ms作业。Zhao等[118]采用二维激光雷达应用邻域均值微分法和Otsu边缘检测算法得到水稻收割边界线,静态测试的平均横向误差为±12 cm,动态测试的平均侧向误差为±25 cm。Zhang等[119]提出了一种基于机器视觉的稻麦收获边缘检测方法,用多项式拟合直线与曲线边界,收割边界的平均定位误差为2.84 cm。Jiang等[120]提出了一种利用深度图像提取导航路径曲线的方法,农田试验表明,边界点的平均检测精度为99.0%,每帧的平均处理时间为45 ms。收获环节的自动对齐控制以基于动力学模型的控制为主,Snider等[121]基于GNSS定位获得的行走信息设计了纯追踪控制器。Coen等[122]将车辆简化为二轮车运动学模型,基于阿克曼转向几何计算车轮转角实现了对行控制。赵腾[123]基于二维激光雷达检测的边界根据履带收获机转向模型设计了PI控制器进行稻麦的对齐收获。王立辉等[124]根据GNSS定位信息采用了基于粒子群的模糊控制算法实现履带收获机的导航控制。
2.4.5 主从农机协同控制技术
多机协同路径规划能够提高协同系统的执行效率,实现区域农田内的多机协同作业调度管理,如Li等[127]提出了基于NSGA-III和改进蚁群算法的多机协同作业智能调度方法,可输出具有部署信息的准确调度规划方案。宫金良等[128]提出了一种以机器人组整体效能最优为目标的协同作业策略,提高了机器人总遍历面积的重复率。姚竟发等[129]考虑联合收割机转弯和作业冲突的情况,提出了以总作业时间和作业时长为综合优化目标的路径优化算法(Improved Genetic Algorithm,IGA),降低了总作业时间和时长。Qin等[130]提出了一种基于主从指令的果园地图多机器人协同导航系统,喷雾机器人的绝对横向误差最大值为24.9 cm,加药机器人的绝对横向误差最大值为29.7 cm,满足传统果园喷药机器人群协同任务的自动导航需求。Zhang等[131]提出了一种农业主从机器人系统的路径规划与跟踪算法,主机能够完成收割、耕作、种植等工作,从机跟踪主人完成运输、加油等辅助工作。
主从协同作业是针对主从农机间距保持、速度跟随、姿态跟随等进行精确控制的技术,是多目标优化控制问题,广泛应用于耕地、播种、收获等环节。近年来,国内外针对主从农机协同作业开展了大量研究。如Shojaei等[132]设计了一种基于饱和观测器的自适应引领-跟随神经网络控制器,实现了多辆拖拉机协同控制。Moorehead等[133]采用一台远程监控终端管理两个自动拖拉机,使用雷达和摄像头引导拖拉机沿着树行的中心行驶。Zhang等[134]开发了一种智能农用车主从系统,该系统通过从车在给定的横向和纵向偏移跟随主车。Noguchi等[126]提出了“GO-TO”和“FOLLOW”两种运行模式的农机协同运行系统,实现了主从农机的协同作业。Zhang等[135]开发了leader-follow系统,实现两台机器人相互配合,完成直线行走与跟踪、地头转弯等协同作业。Luo等[136]采用两车转向角控制律和速度控制律,解决了主从协同运行模式下两车不在同一直线上行驶的问题。Li等[137]设计了由一台主机和一台从机械组成的农机自动导航系统,根据主从机的位置信息控制从车的横向与航向偏差实现主从车的跟随控制。Mao等[138]采用点云地面点滤波(Cloth Simulation Filter,CSF)和随机样本一致性(Random Sample Consensus,RANSAC)算法获取路径点,并采用纯追踪算法对这些路径点进行跟踪,解决了在主从导航模式下转弯无法连续行驶的问题。白晓平团队[139,140]结合反馈线性化理论和滑模控制理论,设计了收割机组队保持控制律和路径跟踪控制律,实现了农业机械的高精度跟踪操作。
经过近30年的研究,国内外已经在环境识别、导航避障、路径规划、多机协同等自动驾驶关键技术方面取得突破,围绕水田、旱田作物在耕、种、管、收全程无人化的生产需求创制了多种无人化作业装备,并开展了应用示范。然而,目前在不规则地块的边界信息获取以及路径规划还需要进一步研究,结合区域气候、农艺、地形、作业能力和作业效率等约束开展作业方向、不规则地块子区域划分、自动加装补给等路径规划相关的研究。此外,还需要针对高速作业、土壤湿滑、坡地等情况开展高精度导航控制算法的研究,保障无人农机的作业质量。在多机协同方面,机群的任务动态分配是今后研究的重点和难点。针对作业时间窗口的改变、可调配农机数量的增加等突发情况,快速完成作业任务的优化与再分配,对于抢种、抢收保障粮食生产至关重要。
2.5 无人化作业装备
无人化作业设备是大田无人农场全生产环节中所使用的移动设备的统称,其发展得益于物联网、大数据、云计算以及人工智能技术在农业智能装备、机器人领域的快速推广应用,现已基本涵盖了农作物耕、种、管、收的全程无人化生产环节,可全自动、全覆盖、高质量、高效率地完成各项必需的农业生产活动。
土地耕整是大田无人农场中各项农业生产环节的基础。无人耕整作业设备是指采用具有自动驾驶功能的拖拉机或具有足够动力源的机器人挂载犁具、深松机、旋耕机以及联合耕整等整地机具开展大田无人耕整作业,具备路径规划、路径跟踪、耕深检测以及机具控制等功能。其中,采用无人驾驶拖拉机挂载深松机进行旱地深松,田间导航作业误差≤2 cm,自动转向稳态误差≤0.23°,作业质量好、作业效率高[116]。图7 所示为北京市农林科学院智能装备技术研究中心研发的无人化耕整地装备。

播/栽、施肥和喷药是大田无人农场中种、管生产环节的重要部分。无动力精准播/栽、施肥和喷药机具与无人驾驶拖拉机组成种苗肥药无人化作业装备。自走式机具安装自动驾驶系统及自动控制装置,经无人化改造形成无人作业装备,可实现大田农资的无人化精准施用。种苗肥药无人化作业装备多具备农资播施量快速精准调节、自动精准播施、余量检测与加装预警、作业质量监测、数据远程传输等功能,部分无人作业装备配备处方图可实现变量无人作业,改变了传统粗放型农资投入模式、提高了作业精度和肥药利用率、实现了作业过程数据的实时监控。图8 所示为北京市农林科学院智能装备技术研究中心研发的无人化播种、喷药装备。

物料补给是实现农机全程无人化作业的关键,也是其中的薄弱环节。目前农机作业过程中的物料补给以人工和简易机械为主,劳动强度大、补给效率低。现有的物料补给方法和装备无法满足农机无人化补给的作业要求。今后应结合无人化作业过程中种、肥、药、油等物料的补给需求,开发适合不同物料运送的无人化补给移动平台,集成研制模块化无人化物料补给装备,实现大田无人农场中种、肥、药、油等物料无人化自动补给。
作物收获是无人化作业的最终环节,也是一锤定音的环节。自走式收获机械安装自动驾驶系统及自动控制装置和无人化改造,结合已改装完毕的配套运粮车,可实现大田作物的无人化精准收获,具备作物行感知、障碍物检测、路径规划、路径跟踪、作物对行、边界对齐、主从协同以及割台控制等功能。图9 所示为北京市农林科学院智能装备技术研究中心研发的无人化收获装备,现场试验结果显示,作业路径跟踪精度±2.5 cm;可地头自动掉头并与作物边界自动对齐,对齐误差≤10 cm;可实现收割机机器人脱分、清选等关键作业部件的工况自动控制,控制精度≥97%。

综上,目前无人化农机装备研发主要聚焦于自动驾驶、精准作业等单机智能控制技术,而多机协同、主机与机具作业协同等相关技术研究不足。在单机控制方面也存在问题,如无人化农机装备自动驾驶目前主要根据规划好的路线进行导航跟踪,尚无法实现基于实时传感信息进行导航和避障控制。未来,无人化农机装备一定朝着更高智能化程度的自主无人方向发展,面向非结构化农田环境信息感知、自主路径规划与导航避障、多机自主协同等核心技术将成为亟待突破的关键技术难题。
2.6 无人农场管控平台
目前,国外知名农机装备企业均研发了农机远程监管平台,通过安装在农机上的车载终端向监管平台实时传输农机作业位置、工作状态、工况等信息,对农机作业进行全方位的监控、管理和提供远程服务。如德国CLAAS公司研发的TELEMATICS系统能够访问机器性能参数、电子数据、作业数据,并进行远程故障维修和智能运维服务[141]。CASE IH公司的AFS Connect系统具有远程监控农机车队的状态和位置、管理作业数据、故障信息分享、故障远程诊断与警报处理等功能,可为农场主的农业生产提供主动服务[142]。John Deere公司开发的远程信息处理的协作系统JDLink具有农机监控、故障诊断、电子围栏和共享地图和AB线等功能,基于该系统构建了覆盖其农机产品较为完备的运维管理与服务体系[143]。AGCO公司研发的FUSE智慧农业系统实现了农场农机播种量、施肥量决策和农机燃料消耗量统计分析等功能,利用该系统能够进行作业路线规划,以减少转弯次数、压实和消耗时间,提高了农机作业效率[144]。欧洲农场管理平台365FarmNet具有农场管理、土壤养分信息采集、处方图制作、作物轮作及品种规划等功能,通过定制实现个性化、便捷智能的农业服务[145]。
随着“互联网+”信息化农业的快速发展,国内在农机监控调度平台(Agricultural Machinery Monitoring & Mcheduling Platform,AMMSP)方面的研究也逐步深入,采用物联网等信息化技术构建了多个业务化运行的监管服务系统,实现了农机作业远程监控与调度,提高了农机作业质量和农机装备的智能化水平[146]。如北京市农林科学院智能装备技术研究中心建立了农机作业远程监管服务平台,实现了农机作业位置、工况、图像等实时监测,作业面积、捆数、质量等参数的监测与统计核算,施肥量、播种量、喷洒量等处方决策,以及农机作业地块的重漏检测、跨区检测等服务,产品面向全国27个省区市开展了推广应用,服务耕地面积1.5亿亩次(1000万公顷)[147]。中国农业机械化科学研究院建立了农业机械化精准作业平台,该平台可实时获取农机作业工况、位置、时间等信息,并进行作业面积统计分析,能够满足农机作业远程监测和管理的需要[148]。哈尔滨工业大学构建的农机智能管理系统可进行农机深松、播种、收获及秸秆还田等不同类型的作业监管服务[149]。雷沃重工股份有限公司面向农机装备集群精准作业服务与远程运维需求,发布了智慧农业解决方案iFarming,构建了农机装备智能云服务平台,实现了耕整、播种、种植、植保、收获、粮食烘干存储等农业生产全程精细化运营管理,该系统服务了20多万台农机[150]。
综上,国外主流农机企业面向农场生产运营、农事服务及农机作业与运维管理等需求,广泛利用大数据、云计算和移动互联等新一代信息技术,打造基于智能服务和数字化应用的农业智能决策与管控平台,向用户提供农机装备全生命周期的管理、监测和运维服务以及农场生产智慧管理服务,提高农场的生产效率和经济效益。经过多年发展,国内目前在农机作业监管方面建成了多个适应国内农业生产模式的服务系统,并实现了业务化运行,为农机高效作业监管提供了有力支撑。但是,农机作业监管技术目前主要用于农机作业监管,在农场农事智能管理、精准作业决策、农机机群任务分配与调度、远程交互等方面缺乏高效分析与决策模型,服务技术也不成熟,尚不能支撑农机全程无人化生产作业。这是当前中国无人农场管控平台面临的主要技术难点,也是未来需要攻克的关键技术。
3 无人农场技术建设案例分析
以北京市农林科学院智能装备技术研究中心在吉林省公主岭市参与建设的玉米无人农场为例,阐述玉米无人农场的组成与应用。公主岭无人农场位于吉林省公主岭市102国道南侧吉林省农业科技示范园内,无人农场建设面积67公顷(1000亩),其中核心区(旱田)23公顷(350亩)。
3.1 无人农场建设内容
玉米无人农场由信息感知系统、智能农机装备、管控云平台三部分组成。
3.1.1 信息感知系统
包含无人机遥感设备、田间综合监测站、物联网测控系统的天空地一体化观测和数据感知系统,能够自动监测农场环境及作物生长信息,并传输至智慧农机管理系统。
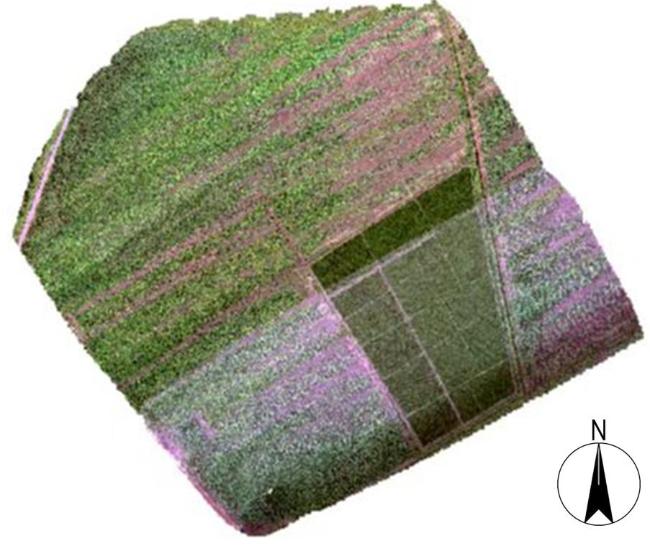
部署了无人机遥感设备用于开展农田地块信息、作物信息采集监测,为农场生产管理和农机装备无人作业提供基础地块边界、作物长势等信息数据。采集到的农田地块信息如图10 所示。
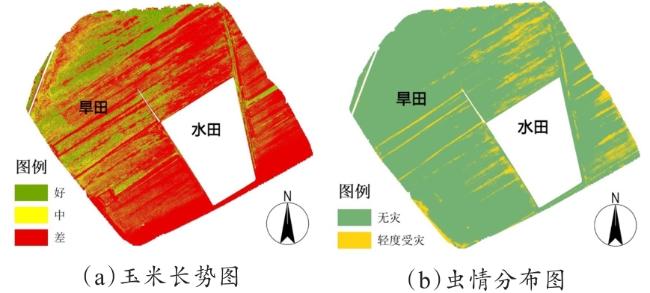
此外,无人农场部署了田间综合监测站点和物联网监控系统,用于实时采集土壤肥力、土壤温湿度、大气温湿度、日照辐射等玉米生长环境信息和叶龄等生长状态的信息,为农场生产管理和农机装备精准作业提供基础数据。虫情、土壤、气象观测站如图11 所示,采集到的玉米长势、虫情分布如图12 所示。

3.1.2 智能农机装备
面向无人农场高效、精准作业需求,将现有的拖拉机及其配套机具、植保机、收割机、运粮车等进行无人化改造,加装无人驾驶系统、精准作业控制装置、远程监测终端等,通过与无人农场云平台进行数据共享和指令交互,实现玉米的耕、种、管、收无人化作业。
如图13 所示,无人拖拉机可搭载深松机、秸秆还田机等农机具进行无人耕整作业,可实现自主规划路径、运行状态实时监测、作业效果实时拍摄上传、作业机具自动升降。

无人拖拉机挂接电驱播种机,并集成高精度卫星定位系统、导航控制系统、精量播种控制系统、作业路径规划系统和网络通信系统,实现主从机协作,完成无人播种作业。玉米无人播种作业场景如图14 所示。

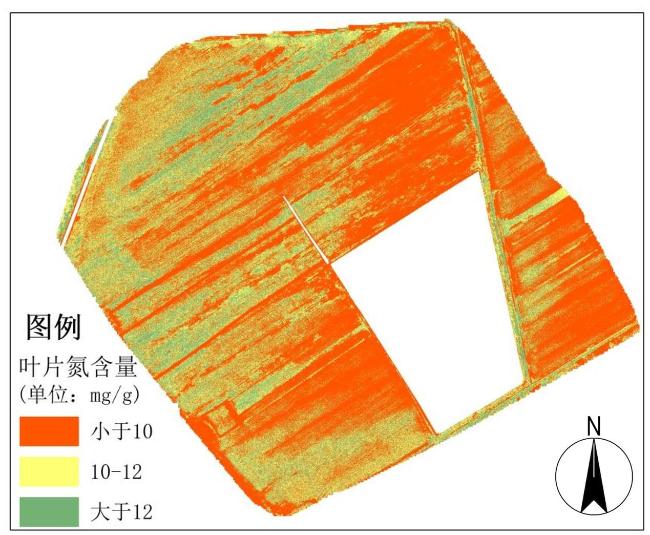
在植保环节,利用无人机搭载多光谱相机采集农田作物信息,采用机器视觉算法对田间作物长势和养分等信息进行分析,生成叶片氮素含量分布图(图15 ),并决策出施肥量;搭载可见光相机采集农田环境图像,分析并获得玉米病虫害信息,制定施药处方图;通过云平台管控系统将施肥、施药处方图下发至地面作业机器端,由无人植保机实现精准变量喷施。
采用无人驾驶高地隙喷杆喷雾机实现精量变量喷洒作业,实现了作业路径自主规划、高精度路径跟踪、地头自动转向、行进速度自动调控、喷杆升降折叠融合控制、紧急避障、远程遥控等功能,减少了药害产生,降低了用人成本,提升了高地隙植保机利用率,为玉米无人农场植保作业提供关键技术装备。
无人收获机集成了作业信息检测系统、自动导航系统、障碍物检测系统和收获作业智能控制系统,实现了玉米无人收获作业状态、工况自动监测、无人驾驶、自动避障、作业自动控制等功能,收获效率提高3~4倍,为农场玉米的无人化收获提供了有力支撑。
3.1.3 无人农场云平台
无人农场云平台主要包括无人农场基础地理信息管理系统、无人农机远程管控系统、智能农机精准作业管理系统和无人农机系统四部分。其中,农场基础地理信息管理系统通过农场田块尺度的厘米级数字地图测绘和处理,为无人农机精准作业提供基础地理信息支撑;无人农机远程管控系统主要面向智能农机装备的作业管控,提供农场耕种管收作业监管、工况监控、前后台交互和作业管理等服务;智慧农机精准作业管理系统及数据库主要面向智能农机装备基准作业,提供基础农作数据维护管理、变量处方管理、农机作业参数共享、农机作业质量监管等服务;无人农机作业展示系统为农场日常系统运维、运营服务和展示提供基础平台。图16 为公主岭市无人农场云平台。

3.2 社会经济效益分析
在全球农业劳动力持续减少、人工成本不断增加、农业生产投入不断加大的现状下,无人农场为现在农业发展提供了有效技术支撑。吉林省公主岭市围绕发展现代农业的战略需求,构建了玉米全程无人化生产农场,实现了玉米耕、种、管、收全程无人化作业,极大提高了玉米生产效率,减少了人工投入。以玉米收获环节为例,无人驾驶收获机可以24小时不间断工作,玉米收获速度提升了3~4倍,67公顷玉米3至5天即可完成收获,节省人工50~60人。在其他环节,无人化播种机在节省人力的同时,还可以实现精量播种和区段播种控制,有效避免了地头重复作业,提高了作业质量,减少了种子投入。综上,公主岭市玉米无人农场的构建与应用是现代科学技术与农业深度融合的典型案例,作为农业领域先进生产力的代表,无人农场技术促进了农机装备的转型升级,推动了现代农业生产方式的转变,具有重大的社会与经济效益。
4 无人农场发展展望
全球农业生产均存在农业从业人员持续减少、人工成本高、传统机械作业质量差等问题,未来谁来种田、怎样种田甚至无人种田问题是全球农业面临的重要挑战。随着现代信息技术与农业生产的深度融合,无人农场在农业生产中发挥的作用和带来的效益越发明显,以自动导航为代表的无人农场关键技术已经或正在改变现代农业生产方式。
以农机自动导航为标志,中国无人农场关键技术已开展了近20年的研究。期间,中国农机自动驾驶系统的发展经历了学习、发展、追赶和超越国外技术的艰辛历程,形成了具有自主知识产权的农机导航系列产品,打破了国外产品长期垄断的局面。近些年,中国农机龙头企业先后研发出了无人驾驶拖拉机、无人植保机、无人收获机以及无人运粮车等无人化农机装备产品,并在小麦、水稻、玉米等大田生产中进行了大量的应用实践,初步形成了适应国内农业生产模式的无人农场雏形。
(1)与国外无人农场技术横向相比,中国无人农场技术总体落后。在农机作业智能决策、精准作业控制等方面,中国积累农业生产数据不足、数据维度也不够,且缺乏对数据的有效分析与利用;此外,中国幅员辽阔,农作物类型南北差异大,作物生长环境和生产农艺要求也存在时空变异;上述原因导致国内成熟的农机作业决策模型少,模型缺乏普适性。总体上,中国在精量播种与变量施肥控制、精准喷洒控制、高效高质收获作业控制等领域尚处于研究发展阶段,与国外存在一定差距,这也是中国未来无人农场技术领域需要着力发展的方向。
(2)无人农场作为新型生产方式,目前在技术上尚不完全成熟,普遍还存在农田非结构环境多模态信息融合感知模型缺乏、无人化农机装备自主性差等问题。未来无人农场技术研究将主要聚焦于农田非结构化环境感知、复杂多变农田环境下农机无人驾驶、无人农机作业任务分配与路径自主规划、无人化农机机群自主协同作业控制等核心技术领域,这些技术既是难点,也是未来最具竞争力的技术制高点。中国与国外在该领域基本处于同一起跑线,是未来最有可能超越国外同类技术产品的领域。
(3)中国无人农场的发展需要瞄准农业现代化与乡村振兴战略的重大需求,突破一批无人农场卡脖子与短板技术,创制适用于中国农业生产的无人化农机装备,实现机器代替人力、电脑代替人脑、自主取代进口的转变,并通过技术产品的广泛推广应用,加速改善中国农业生产面临的困局,提高中国农业生产效率与效益,引领现代农业的发展,早日成为世界农业强国。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}