



0 引 言
目前,基于计算机技术的对虾发病检测研究主要可以分为两类方法:一类是基于机器学习的预测方法,即利用发病时的养殖环境数据和对虾性状构建算法模型,通过监测相关数据进行预测。例如,蔡欣欣[3]建立了基于深度森林算法的虾体细菌总数、虾体弧菌占比、水体细菌、盐度的4维向量预警预报模型,可对对虾急性肝胰腺坏死病(Acute Hepatopancreatic Necrosis Disease, AHPND)的发生进行预警。Khiem等[4]除水质因素与对虾性状外,利用地理信息系统(Geographic Information System, GIS)引入地理信息作为检测数据,基于机器学习方法实现预测对虾病害。Tuyen等[5]考虑养殖环境的空间因素,基于决策树构建了对虾病害与水质因素和养殖场地空间因素的模型,用以预测对虾白斑病的发病。这类方法简单易实现,但是由于各养殖场地的环境差异较大,对方法的泛化性能有很大的影响。而且,在工厂化养殖条件下,病害的早期水质数据变化不明显[6],因此这类方法的效果不太好。另一类方法是基于计算机视觉的检测方法。该类方法利用计算机视觉技术对对虾图像进行处理,从而获取对虾发病情况。例如,Ramachandran和Mohan[7]使用灰度共生矩阵(Gray Level Co-occurrence Matrix, GLCM)提取对虾图像特征,并结合简单的人工神经网络(Artificial Neural Network, ANN)模型来进行对虾变异性的分割,从而获得了对白斑病较好的检测效果。Wang等[8]则提出了一种基于LeNet网络框架的卷积神经网络(Convolutional Neural Networks, CNN)模型,实现了对发病对虾的快速且精确的检测,有助于对虾病害的早期预警。刘子豪等[9]以深度卷积神经网络(Deep Convolutional Neural Networks, DCNN)作为识别框架的基础,有效提高了对不同来源染病虾的泛化效果。这类方法具有较高的精度,但要求采集高质量的图像进行检测,并对设备配置有一定要求,因此在实际生产中的应用不易。
计算机视觉技术的发展为行为检测提供了新的方法。此前,已在畜牧业中进行了一些相关研究,如奶牛的跛行行为[10]、猪的分娩行为[11]、鸡的啄羽行为[12]以及绵羊的斗殴行为[13]等。与之相比,水产养殖业的相关研究主要集中在异常行为检测和摄食强度评估方面。位威[14]、周超等[15]和刘朝阳[16]选择从养殖鱼的摄食图像中提取图像纹理特征作为数据集,然后使用支持向量机(Support Vector Machine, SVM)来评估摄食强度。刘世晶等[17]利用帧间光流特征数据训练循环神经网络(Recurrent Neural Network, RNN),以实现草鱼摄食状态的分类。汪峰[18]利用YOLO(You Only Look Once)-Deep SORT(Deep Simple Online and Realtime Tracking)级联网络绘制虾苗活动轨迹,并结合图像纹理特征实现判断虾苗的活力。Zhao等[19]利用光流法提取鱼类运动片段的时空特征构建数据集训练改进RNN,实现了对循环水系统中鱼类异常行为的检测。Han等[20]使用光流法提取光流能量图,将鱼群分布的空间信息与能量图融合,使用融合图像训练CNN,有效地识别了鱼群的不同行为状态。Li等[21]使用Faster R-CNN检测图像中的鱼类,通过贪婪算法和匈牙利算法将关联各帧检测结果,实现了游动鱼类跟踪。Li等[22]提出了一种JDE(Jointly Learns the Detector and Embedding)范式的CMFTNet视频跟踪模型,并使用无锚框方法解决了鱼群相互阻碍的问题,最终实现了对游动鱼类的高精度多目标跟踪。Xu等[23]使用基于YOLOv8的目标跟踪算法,配合双目相机进行运动轨迹三维重建,实现了氨氮胁迫下鱼类行为检测。Perez-Escudero等[24]提出了一种idTracker算法,可实现多目标稳定跟踪的同时获得每条鱼的加速度等运动参数,进而将行为检测实时精确到个体。
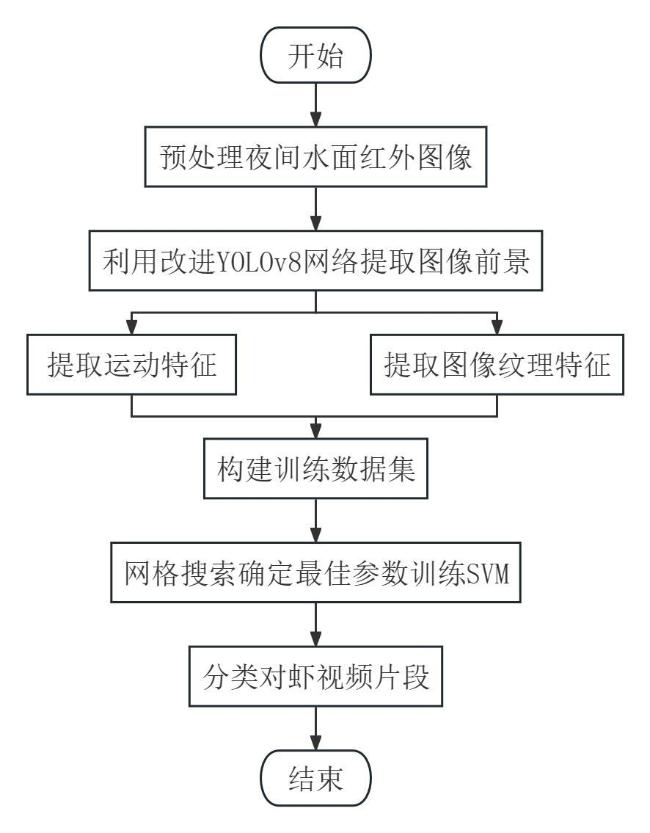
目前,基于计算机视觉的对虾发病检测方法存在设备要求高、使用不便的问题,不适用于工厂化养殖实际生产。本研究目的是研究一种能在成本和检测效果之间取得平衡的基于改进YOLOv8和多元特征相的对虾发病检测方法。首先,利用改进的YOLOv8网络从对虾夜间红外视频中提取前景。其次,利用光流法和GLCM提取对虾视频片段的运动特征和图像纹理特征,并构建数据集。最后,训练SVM分类器用于检测对虾视频片段,实现对正常和发病对虾视频片段的分类。
1 实验方法
1.1 算法流程
1.2 对虾图像采集
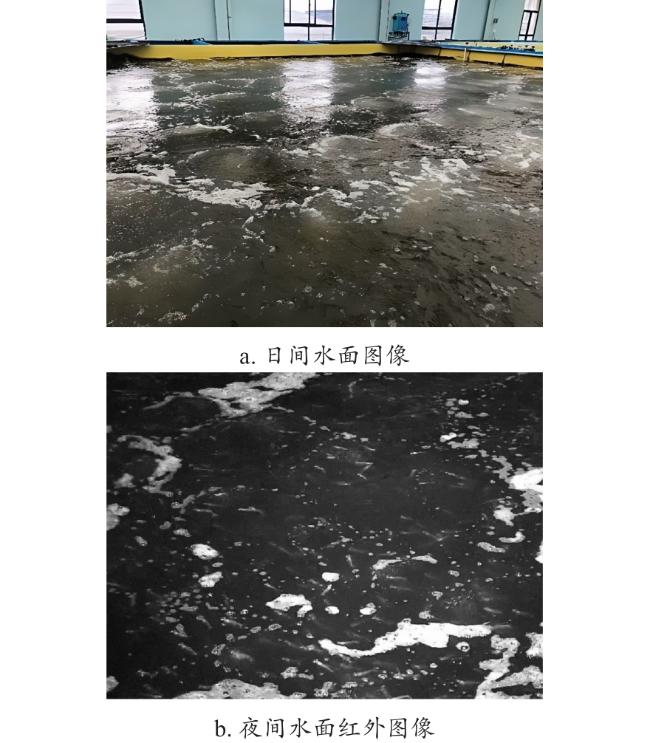
对虾夜间红外视频采集于浙江省海洋水产养殖研究所永兴基地。采集时间为2023年7月20日—9月30日。由于水面反射和对虾体色等因素的影响,在养殖池的日间水面图像中很难观察到对虾。然而,夜间对虾活动频繁且具有明显的浮游现象,因此在夜间水面红外图像中可以明显地观察到对虾活动,如图2所示。图像采集系统由摄像头和计算机组成,两者使用千兆双绞线连接,采集的图像保存在计算机本地。摄像头型号为海康威视iDS-2DC7423MW-A/S5球机,球机安装于养殖车间顶部中央,位于两排养殖水池中间过道的正上方,如图3所示。摄像头可旋转和调整镜头方向,以便拍摄不同区域的养殖水池。对虾的养殖模式为工厂化循环水养殖,品种为南美白对虾,养殖水池的规格为9 m×9 m,养殖密度为400尾/m2。

为保证摄像头红外模式的正常工作,采集选取时间段为每日夜间19∶00~次日凌晨4∶00。在录制过程中,人工调整摄像头参数以确保视频清晰流畅。所采集的视频包含了对虾患急性肝胰腺坏死病、白斑病、烂鳃病、烂眼病和虹彩病毒病等发病视频以及对虾正常视频。视频的分辨率像素为1 280×720,帧率为25帧/s,储存格式为*.mp4。经过剪辑处理后,质量不佳的片段被去除,最终获得了1 500个时长为5 s的视频片段。
1.3 基于改进YOLOv8的图像前景提取
在对虾养殖池中,水面上常有大量浮沫。夜间红外图像中,浮沫的灰度与对虾的灰度相似。此外,浮沫会随水流在水面上移动,严重干扰了对虾图像前景的提取。目标检测方法能够从图像中仅找出感兴趣的目标,并确定它们的类别和位置。为了有效消除浮沫的干扰,本研究采用改进的YOLOv8网络对水面对虾进行目标检测,并提取检测框内的区域作为图像前景。
YOLOv8是2023年提出的一种基于PyTorch框架的新型CNN目标检测网络。它包括YOLOv8-n、s、m、l、x 5种模型结构。随着模型深度和宽度的增加,每个模型的参数量和计算量也会增加。考虑到实际生产条件下平台算力的限制,改进网络应该具有较低的参数量和计算量,以提高网络在低算力平台上的检测速度和部署性能。为了实现检测精度和速度之间的平衡,选择基于YOLOv8s网络进行改进。在YOLOv8s主干网络中添加了FasterNet[26]模块以实现轻量化,并引入跨空间学习的高效多尺度[27](Efficient Multi-Scale Attention, EMA)注意力机制来弥补轻量化主干网络的精度损失。传统注意力机制中的通道降维操作可能会对特征提取产生副作用。EMA注意力机制通过设计一个多尺度并行子网络来建模特征之间的关系,避免了通过卷积进行降维。这样可以保留各个通道上的信息,并将通道维度分组为多个子特征,使得空间语义特征能够更均匀地分布。EMA注意力机制的结构如图4所示。

Fasternet网络是一种新型的轻量化网络。它使用部分卷积(Partial Convolution, PConv)层来进行特征提取,从而大大减少了计算量和参数量。在网络中的每个FasterNet模块中,都包含一个PConv层,后面跟着两个逐点卷积(Pointwise Convolution, PWConv)层,它们共同构成了反向残差块。PConv利用了特征图中的冗余,只在一部分通道上应用规则卷积,而不影响其他通道。因此,PConv所需的浮点运算次数(Floating Point Operations, FLOPs)相对较低,从而对计算能力的要求也较低。这使得Fasternet在边缘平台上具有更快的检测速度。同时,PConv也对提取空间特征方面具有优化效果。改进后的网络结构如图5所示。

图6展示了常用的基于阈值分割的图像前景提取方法和基于改进的YOLOv8方法的提取效果对比。从图中可以看出,基于改进的YOLOv8方法的提取效果更好,能够有效地提取出对虾图像前景,并且最大程度地避免了水面浮沫的干扰。

1.4 基于光流法的运动特征提取
光流法是计算机视觉技术中一种用于估计视频序列中物体运动的方法。它通过比较相邻帧之间的像素强度差异来计算物体的运动。光流是一个矢量,其幅值代表了像素点的相对运动速度,方向代表了像素点的相对运动方向。借助光流可以获取对虾的相对运动速度与方向。Farneback光流算法是一种稠密光流算法,由Farnebäck于2003年提出。与稀疏光流算法相比,该算法能够更准确地计算物体的运动,并且适用于相邻帧中所有像素点的移动估算光流。由于Farneback光流算法计算的是全局稠密光流,而各个对虾检测框内的像素个数不一致,所以需要将检测框内的所有光流相加得到光流F,以便于后续计算,对于每个检测框中光流F的计算方式如公式(1) 所示。
式中:fi 代表检测框中每个像素对应的光流;n代表检测框中像素的个数。
对虾视频的每一帧中,对虾游动的相对速度可以通过光流F的幅值V来表示,对于当前帧中所有对虾的相对速度V,其中最大值为V max;最小值为V min;平均相对速度为V avg。V avg的计算方式如公式(2) 所示。
式中:num为当前帧中对虾的个数。
表1 同一采集区域不同时间的参数V avgTable 1 Parameter V avg at different times in the same collection area |
| 日期/MM—DD | 对虾情况 | V avg |
|---|---|---|
| 07—20 | 正常 | 7.97 |
| 07—28 | 发病 | 8.12 |
| 08—20 | 正常 | 7.43 |
| 08—20 | 正常 | 7.17 |
| 09—26 | 发病 | 6.90 |
| 09—30 | 发病 | 7.52 |
根据对虾发病时的行为特征,发病对虾的相对运动速度和方向与对虾群体的平均值之间存在一定差异。因此可以将相关参数的离散程度作为特征参数。在本实验中,采集区域的对虾数量通常较少且不固定,无法使用方差等度量来衡量离散程度。本研究设计了一个无量纲参数T来作为运动特征的检测参数,T受光流幅值波动与对虾个数变化的影响较小,它的数学意义可以反映出当前帧中对虾相对运动速度的离散度。T的计算方式如公式(3) 所示。
每帧中对虾游动的相对运动方向即相光流F的方向记为D。D的取值范围为[–π,π]。对于当前帧中所有对虾的相对方向D,其中最大值为D max;最小值为D min。极差RD 的计算方式如公式(4) 所示。
RD 能够反映前帧中对虾相对运动方向的离散度。参数T和参数RD 即从当前帧中提取到的运动特征参数。
1.5 基于GLCM的图像纹理特征提取
灰度共生矩阵(Gray-Level Co-occurrence Matrix, GLCM)是一种常用于描述图像纹理特征的统计方法,在视觉领域得到广泛应用。它可以反映像素及其周围空间邻域的灰度变化和分布情况。GLCM的定义为:给定灰度级为i的像素点,在距离为d的位置上出现灰度级为j的像素点的概率。其中,d表示两个像素间的相对距离;θ表示生成它们的方向。GLCM计算得到的结果构成一个矩阵 p (i,j,d,θ)。由于发病对虾具有侧游和离群漫游的特点,发病时水面上对虾的分布是不均匀的。GLCM的能量和熵这两个统计量可以用来表示图像中像素分布的情况,从而可以选择它们作为特征参数。 为0°、45°、90°和135°这4个方向。考虑对虾的相对运动方向是不固定的,本研究选择计算这4个方向的能量和熵,然后取平均值作为图像纹理特征参数。
能量(Energy)是GLCM元素值的平方和。它反映图像灰度分布的纹理粗细程度和均匀程度。能量的计算如公式(5) 所示。
式中:G为当前图像的最大灰度级。
熵(Entropy)是GLMC元素值的随机性度量,反映了图像灰度分布的复杂程度或非均匀程度,熵的计算公式如公式(6) 所示。
1.6 构建特征数据集
从所采集的视频片段中随机挑选200个发病片段和200个正常片段。提取这些片段的帧多元特征数据,剔除离散数据后,求取各帧平均值作为该片段的特征数据。所有数据经归一化处理后用于构建特征数据集。数据集包含数据和标签。标签表示每个视频片段录制时对虾的状态,将其分为正常和发病两类。将每个视频片段提取的两个特征参数(T、RD )与对应标签组成一个400×3的向量组,构建运动特征数据集;将两个图像纹理特征参数(能量、熵)与对应标签组成一个400×3的向量组,构建图像纹理特征数据集。将所有特征参数与对应标签组成一个400×5的向量组,构建多元特征数据集。
2 实验结果与分析
2.1 YOLOv8改进性能分析
2.1.1 性能评价指标
本研究主要使用参数量(Parameters)、FLOPs、mAP0.5(mean Average Precision)和mAP0.95评价网络性能。
参数量表示网络各层中需要训练的参数数量,反映网络的复杂程度和内存占用,参数量越大,所需内存越多。FLOPs表示处理一张图像所需的浮点运算数量,与计算平台无关,可公平比较网络的计算量。一般情况下,FLOPs越低,网络的检测速度越快。
对于网络的检测性能,有精度(Precision)和召回率(Recall)两个指标,计算方式如公式(7) 和公式(8) 所示。
mAP0.5指的是当将IoU(Intersection over Union)设置为0.5时,对所有类别的所有图片计算AP的平均值。因此,在公式(1) 和公式(2) 中,TP表示IoU>=0.5的检测框数量,FP表示IoU<=0.5的检测框数量。通过绘制精度作为纵坐标,召回率作为横坐标的曲线,即P-R曲线,计算AP为P-R曲线下方的面积。因此,mAP0.5的计算方式为,则mAP0.5的计算方式如公式(9) 所示。
式中:num_classes为目标检测的类数,在本方法中等于1;mAP0.95的计算方式和mAP0.5类似,其计算时IoU为0.95,其他计算方法相同。
2.1.2 性能结果分析
训练所用数据集来源于采集的视频片段帧图像。从中选择4 800张特征明显、轮廓完整的图像作为训练集,并使用Labelimg标注软件对浮在水面上的对虾进行了标注。标注好的数据集按照8∶1∶1的比例分为训练集、验证集和测试集。训练所使用的操作系统为Windows 11家庭版,Python版本为3.9.16,PyTorch框架版本为1.13.1,使用的显卡型号是NVIDIA GeForce RTX 3060,显存为6 G,CUDA版本为11.7.1。输入大小为640×640,batchsize为4,训练轮数为300。
表2 不同改进的消融实验结果Table 2 Results of different improved ablation tests |
| 消融 试验 | FasterNet | EMA | mAP0.5/% | mAP0.95/% | Parameters/M | Flops/G |
|---|---|---|---|---|---|---|
| 方法1 | 不添加 | 不添加 | 94.9 | 67.3 | 11.1 | 28.6 |
| 方法2 | 添加 | 不添加 | 93.6 | 63.1 | 6.1 | 16.2 |
| 方法3 | 不添加 | 添加 | 93.3 | 67.7 | 10.7 | 28.6 |
| 方法4 | 添加 | 添加 | 95.1 | 65.2 | 6.1 | 16.5 |
为了进一步分析本研究提出的改进YOLOv8网络的性能,使用相同的数据集和训练设置来训练其他类型的YOLO网络作为参照。训练结果详见表3。
表3 不同网络模型训练结果对比Table 3 Comparison of training results of different networks |
| 网络模型 | mAP0.5/% | mAP0.95/% | Parameters/M | Flops/G |
|---|---|---|---|---|
| YOLOv5 | 93 | 64.4 | 7.0 | 16.0 |
| YOLOv7 | 95.5 | 65.8 | 37.2 | 105.2 |
| YOLOv7-Tiny | 72.7 | 29.0 | 6.1 | 13.2 |
| YOLOv8-VanillaNet[30] | 92.8 | 60.5 | 3.8 | 10.4 |
| 改进YOLOv8 | 95.1 | 65.2 | 6.1 | 16.5 |
从表3可以看出,本研究提出的改进YOLOv8网络在对虾红外数据集上与其他几种YOLO网络模型相比,mAP0.5和mAP0.95仅次于YOLOv7,分别降低0.4%和0.6%。而参数量和Flops远低于YOLOv7,与YOLOv5相当。尽管YOLOv7-Tiny和YOLOv8-VanillaNet的参数量和Flops更低,但精度不及改进YOLOv8,它们的mAP0.5和mAP0.95分别比改进的YOLOv8降低22.4%、36.2%和2.3%、4.7%。这表明改进后的YOLOv8在不大幅度增加参数量和Flops的情况下有效提高了检测精度。因此,在满足方法检测要求的情况下,改进后的YOLOv8更适合部署到低算力平台,并应用于实际生产环境。
2.2 实际测试表现
将3个数据集分别输入SVM,使用k-交叉验证法(k-Cross Validation)和网格搜索法(Grid Search)确定训练参数中惩罚参数C和核函数参数g(gamma)的最佳值。k-交叉验证法的k值取5,训练所使用的核函数是高斯径向基(rbf)核函数。训练结果如表3所示,经过训练,当使用多元特征数据集,C取8,g取13.75时,SVM的分类准确率达到最高值97.625%。
为了对本方法的整体效果进行评价,从采集到的视频片段中(不包括用于采集训练数据集的片段)随机选取了150个正常片段和150个发病片段,如图7所示。然后,将这300个片段随机分为3组测试样本,每组包含50个正常片段和50个发病片段。将各视频片段的多元特征参数作为输入,利用训练好的SVM分类器对所有片段进行分类检测。结果如表4所示,3组样本中对于正常片段的检测精度均高于对发病片段的检测精度。正常片段的平均检测准确率为93.3%,而发病片段的平均检测准确率为72.7%。大部分误差发生在将发病片段错误地识别为正常片段,占总误差的88.2%。样本的总体检测准确率为83%,说明本方法具有良好的效果并且有一定的实用价值。

2.3 测试误差分析
根据检测结果,误差来源主要分为3类。
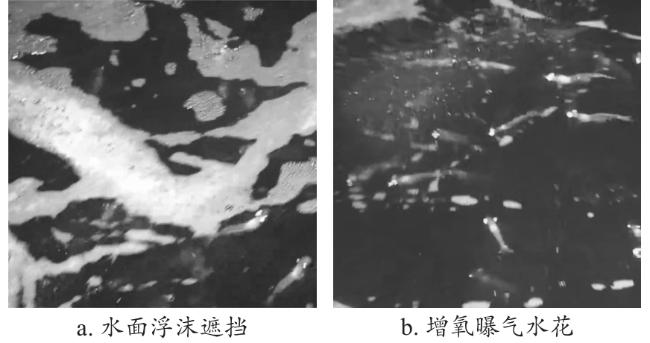
1)提取对虾数量过少。在部分片段中,有较大的浮沫飘过图像采集区域,遮挡水面上的部分对虾,如图8a所示,使部分帧图像中提取的对虾数量过少,多元特征无法有效反映对虾的运动情况。此时会将发病片段误判为正常片段,对正常片段的检测影响较小。造成这种情况的原因可能是采集区域较小,对虾工厂化养殖的养殖密度较高,养殖池中产生浮沫是正常现象,可以适当扩大采集区域,减少浮沫所占比例。
3)视频质量影响。目前大部分摄像头采用光学成像原理,因此受到光学成像原理和数字图像原理的影响。在视频像素不变的情况下,采集区域越大,物体在图像中所占的像素个数越少。使用Farneback光流算法计算图像的全局光流时,需要计算出图像每个像素的运动信息,因此,物体所占像素越少,光流之间的差异就越小。当采集区域过大时,每只对虾所占像素个数较少,使得发病对虾与正常对虾之间的光流差异较小,导致检测误差。同时,视频质量也影响CNN网络的特征提取能力。当检测区域较大时,网络面临小目标检测问题[31],影响了网络的特征提取能力。因此,在需要扩大采集区域时,应适当提高视频采集的质量。
3 结论
针对目前对虾发病检测缺乏自动化的问题,本研究提出了一种新的检测方法。使用改进的YOLOv8网络提取对虾图像的前景,随后通过光流法和GLCM提取多元特征,并用这些特征训练SVM分类器,以检测对虾是否发病。主要结论如下。
1)基于改进的YOLOv8图像前景提取方法有效去除了水面浮沫的干扰,同时提取效果良好。采用FasterNet轻量化网络替换YOLOv8s主干网络,并引入EMA注意力机制,可大幅降低网络参数量和计算量,并保持较好的目标检测精度。因此本方法适用于低算力平台上的实时检测,方便投入实际生产。
2)基于光流法和GLCM提取的多元特征能够很好地反映发病对虾与正常对虾之间运动速度和方向的差异,凭此训练的SVM分类器检测效果良好,在随机抽取的样本上,该检测方法准确率达到83%。产生误差的主要原因是采集区域的大小和位置对提取的对虾数量造成影响,多元特征无法有效反映对虾的运动情况。因此应根据实际生产环境灵活设置采集区域。
3)本方法只需使用消费级监控摄像机作为图像采集设备,在成本与效果之间取得了平衡,可为后续实用化的发病检测方法提供理论依据和方法支持。但受条件限制,仅在工厂化养殖环境下进行了实验,尚不能适用于多种养殖环境,仍有改进空间。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}