XU Ruifeng1,2( ), WANG Yaohua1, DING Wenyong1, YU Junqi1, YAN Maocang1(), CHEN Chen1()
), WANG Yaohua1, DING Wenyong1, YU Junqi1, YAN Maocang1(), CHEN Chen1()
Received:2023-11-09
Online:2024-02-29
corresponding author:
Supported by:XU Ruifeng, WANG Yaohua, DING Wenyong, YU Junqi, YAN Maocang, CHEN Chen. Shrimp Diseases Detection Method Based on Improved YOLOv8 and Multiple Features[J]. Smart Agriculture, doi: 10.12133/j.smartag.SA201311014.
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.smartag.net.cn/EN/10.12133/j.smartag.SA201311014

Fig. 1
Flow chart of shrimp disease detection method
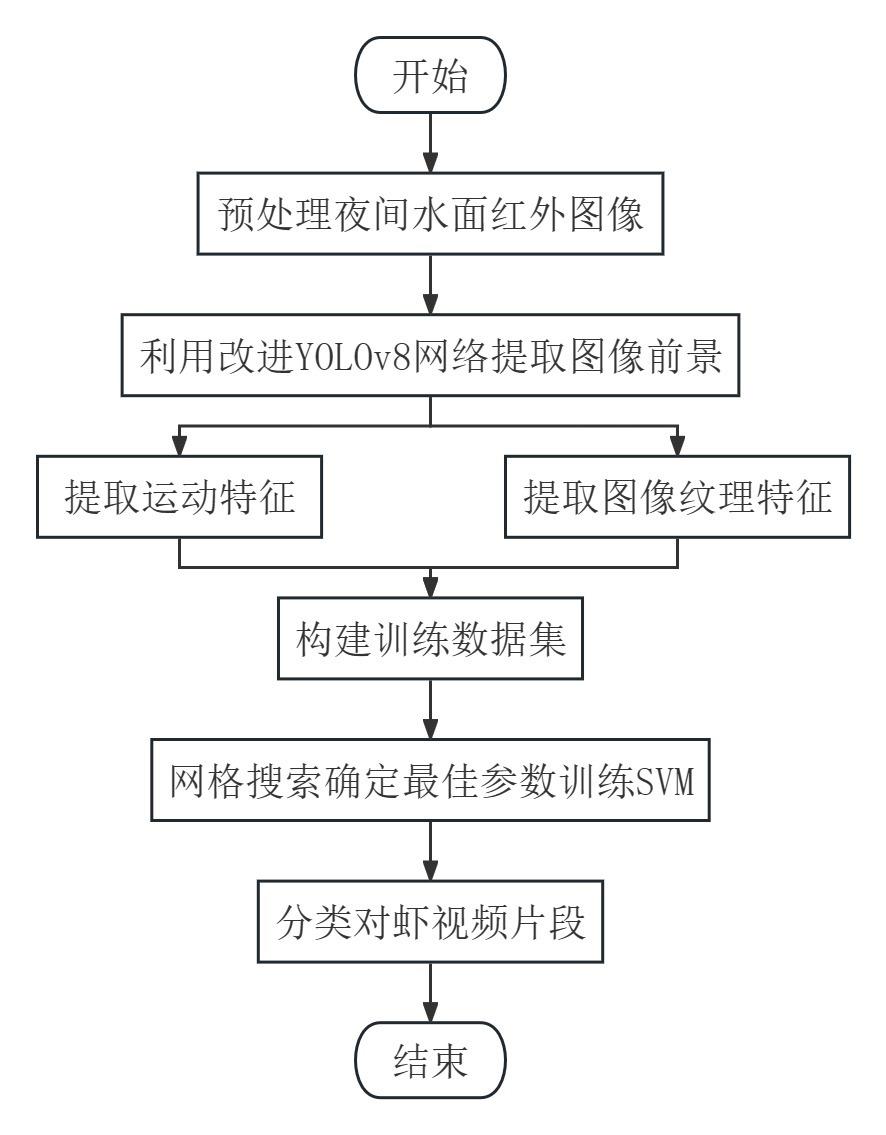
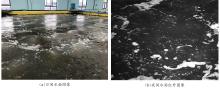
Fig. 2
Image of the surface of the shrimp culture pond

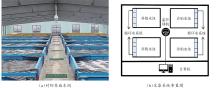
Fig. 3
Image acquisition system of shrimp


Fig. 4
Structure of of efficient multi-scale attention attention mechanism
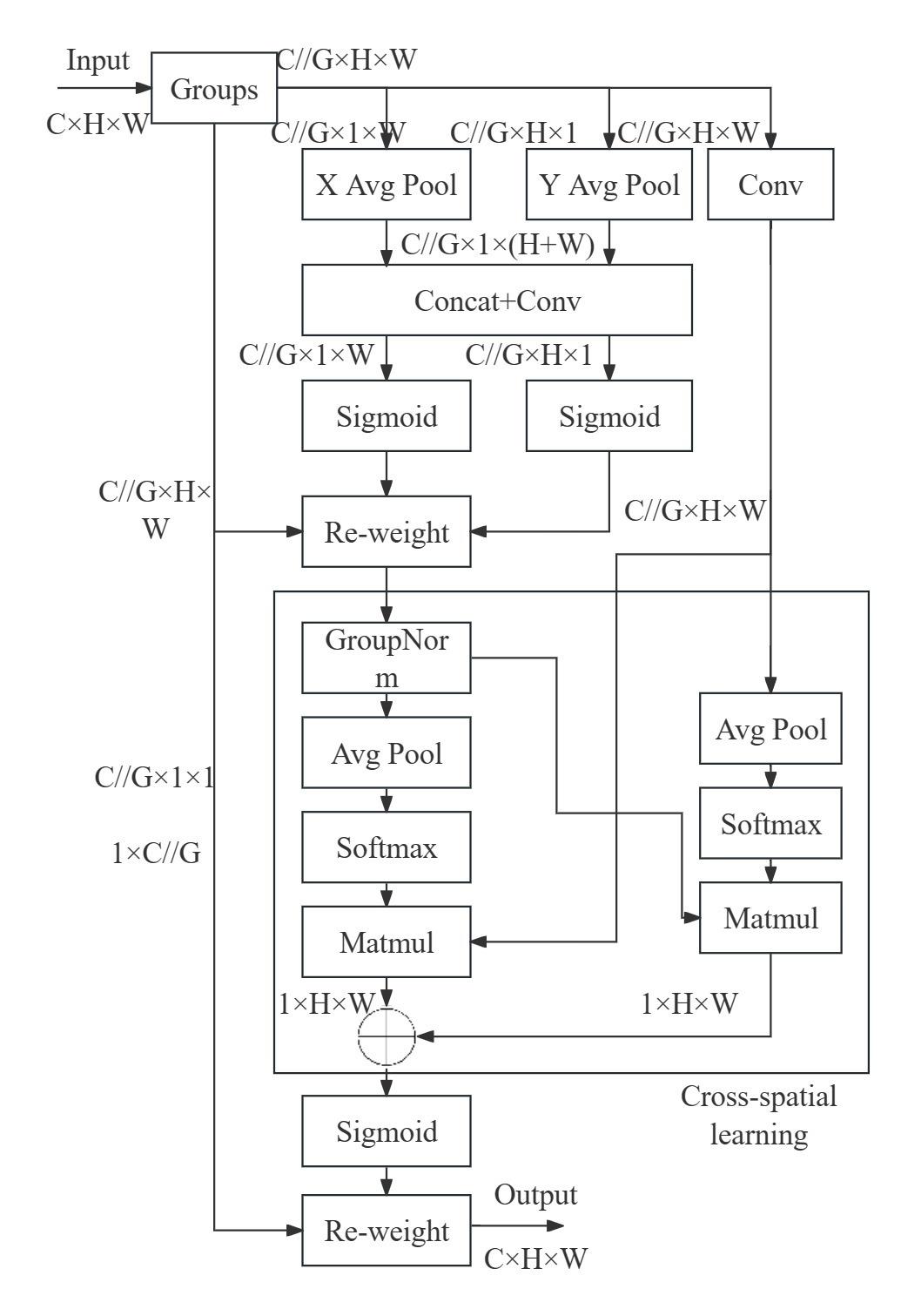
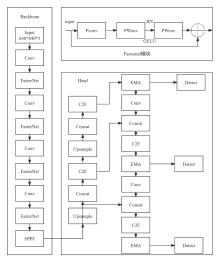
Fig. 5
Structure of the improved YOLOv8 network
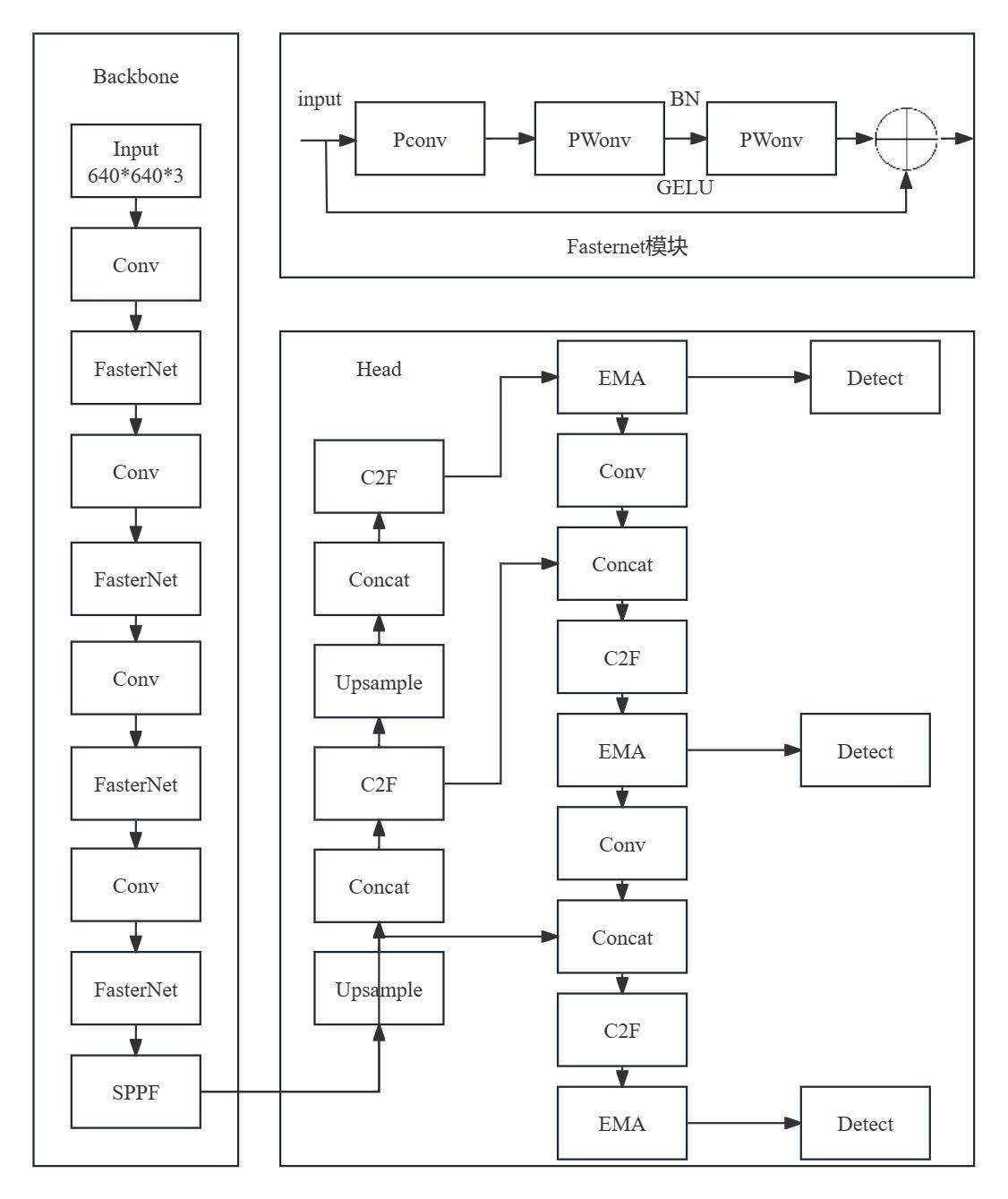

Fig. 6
Comparison of extraction of image foreground
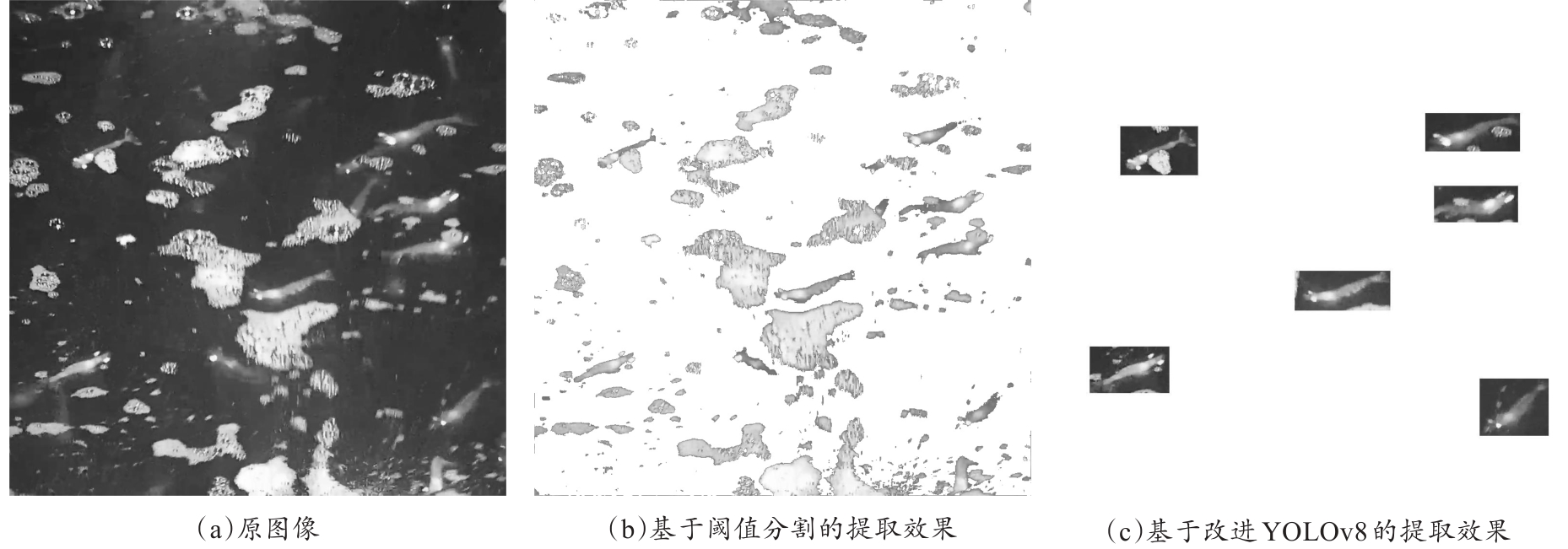
Table 1
Parameter V avg at different times in the same collection area
| 日期/MM–DD | 对虾情况 | V avg |
|---|---|---|
| 07–20 | 正常 | 7.97 |
| 07–28 | 发病 | 8.12 |
| 08–20 | 正常 | 7.43 |
| 08–20 | 正常 | 7.17 |
| 09–26 | 发病 | 6.9 |
| 09–30 | 发病 | 7.52 |
Table 2
Results of different improved ablation tests
| 消融 试验 | FasterNet | EMA | mAP0.5/% | mAP0.95/% | Parameters/M | Flops/G |
|---|---|---|---|---|---|---|
| 方法1 | 不添加 | 不添加 | 94.9 | 67.3 | 11.1 | 28.6 |
| 方法2 | 添加 | 不添加 | 93.6 | 63.1 | 6.1 | 16.2 |
| 方法3 | 不添加 | 添加 | 93.3 | 67.7 | 10.7 | 28.6 |
| 方法4 | 添加 | 添加 | 95.1 | 65.2 | 6.1 | 16.5 |
Table 3
Comparison of training results of different networks
| 网络模型 | mAP0.5/% | mAP0.95/% | Parameters/M | Flops/G |
|---|---|---|---|---|
| YOLOv5 | 93 | 64.4 | 7.0 | 16.0 |
| YOLOv7 | 95.5 | 65.8 | 37.2 | 105.2 |
| YOLOv7-Tiny | 72.7 | 29.0 | 6.1 | 13.2 |
| YOLOv8-VanillaNet[ | 92.8 | 60.5 | 3.8 | 10.4 |
| 改进YOLOv8 | 95.1 | 65.2 | 6.1 | 16.5 |

Fig. 7
Examples of test samples
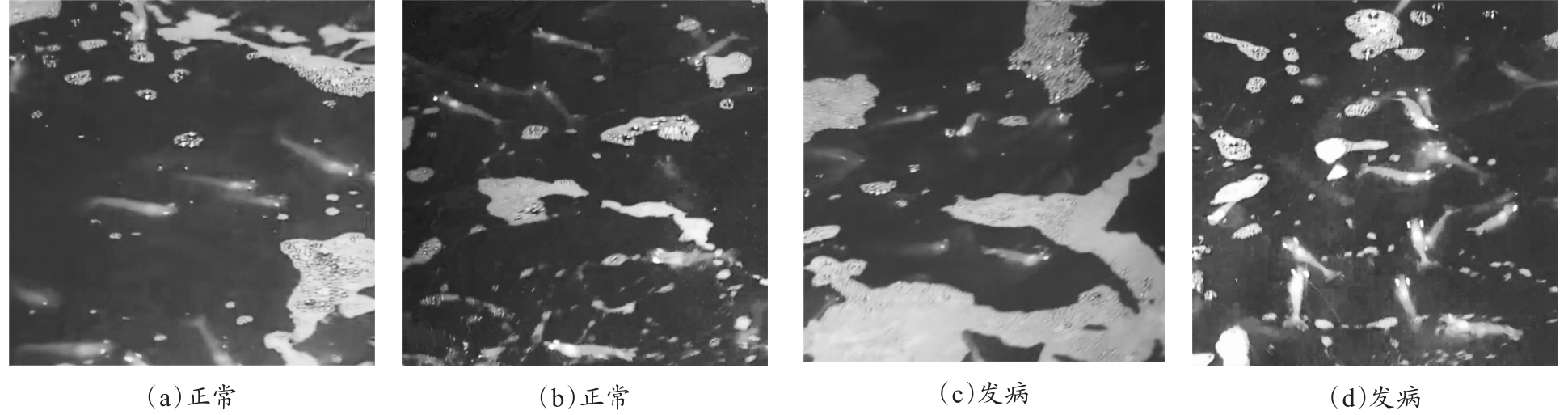
Table 4
The results of test samples detection
| 组别 | 是否发病 | 总数 | 检测数 | 准确率/% |
|---|---|---|---|---|
| 1 | 正常 | 50 | 44 | 88 |
| 发病 | 50 | 36 | 72 | |
| 2 | 正常 | 50 | 49 | 98 |
| 发病 | 50 | 35 | 70 | |
| 3 | 正常 | 50 | 47 | 94 |
| 发病 | 50 | 38 | 76 | |
| 合计 | 300 | 249 | 83 |

Fig. 8
Examples of error sources

| 1 |
|
| 2 |
|
| 3 |
蔡欣欣. 池塘养殖凡纳滨对虾急性肝胰腺坏死病(AHPND)的预警数学模型构建[D]. 上海: 上海海洋大学, 2021.
|
|
|
|
| 4 |
|
| 5 |
|
| 6 |
孙世玉, 江敏, 金若晨, 等. 凡纳滨对虾池塘养殖过程中水质与虾虹彩病毒病发生的相关性[J]. 上海海洋大学学报, 2020, 29(5): 641-649.
|
|
|
|
| 7 |
|
| 8 |
|
| 9 |
刘子豪, 张素兰, 贾小军, 等. 基于自适应卷积神经网络的染病虾识别方法[J]. 农业机械学报, 2022, 53(5): 246-256.
|
|
|
|
| 10 |
|
| 11 |
|
| 12 |
张然. 蛋鸡啄羽现象识别及羽毛覆盖度计算研究[D]. 保定: 河北农业大学, 2023.
|
|
|
|
| 13 |
|
| 14 |
位威. 高密度水产养殖鱼视觉监测技术研究[D]. 福州: 福建工程学院, 2022.
|
|
|
|
| 15 |
周超, 徐大明, 吝凯, 等. 基于近红外机器视觉的鱼类摄食强度评估方法研究[J]. 智慧农业, 2019, 1(1): 76-84.
|
|
|
|
| 16 |
刘朝阳. 室外养殖池塘智能投饵管控系统设计[D]. 天津: 天津科技大学, 2022.
|
|
|
|
| 17 |
刘世晶, 涂雪滢, 钱程, 等. 基于帧间光流特征和改进RNN的草鱼摄食状态分类[J]. 水生生物学报, 2022, 46(6): 914-921.
|
|
|
|
| 18 |
汪峰. 基于计算机视觉的虾苗活力分析研究[D]. 上海: 上海海洋大学, 2022.
|
|
|
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
陈凯琳. 南美白对虾栖息、生长及游泳特性试验研究[D]. 舟山: 浙江海洋大学, 2020.
|
|
|
|
| 29 |
|
| 30 |
|
| 31 |
|
| [1] | ZUO Haoxuan, HUANG Qicheng, YANG Jiahao, MENG Fanjia, LI Sien, LI Li. In Situ Identification Method of Maize Stalk Width Based on Binocular Vision and Improved YOLOv8 [J]. Smart Agriculture, 2023, 5(3): 86-95. |
| [2] | KANG Xi, LIU Gang, CHU Mengyuan, LI Qian, WANG Yanchao. Advances and Challenges in Physiological Parameters Monitoring and Diseases Diagnosing of Dairy Cows Based on Computer Vision [J]. Smart Agriculture, 2022, 4(2): 1-18. |
| [3] | ZHAO Jinling, DU Shizhou, HUANG Linsheng. Monitoring Wheat Powdery Mildew (Blumeria graminis f. sp. tritici) Using Multisource and Multitemporal Satellite Images and Support Vector Machine Classifier [J]. Smart Agriculture, 2022, 4(1): 17-28. |
| [4] | XIAO Shijie, WANG Qiaohua, LI Chunfang, ZHAO Limei, LIU Xinya, LU Shiyu, ZHANG Shujun. Construction of Milk Purchase Classification Model Based on Shuffled Frog Leaping Algorithm and Support Vector Machine [J]. Smart Agriculture, 2021, 3(4): 77-85. |
| [5] | LI Dongbo, HUANG Lyuwen, ZHAO Xubo. Detection Method of Apple Mould Core Based on Dielectric Characteristics [J]. Smart Agriculture, 2021, 3(4): 66-76. |
| [6] | FLORES Paulo, ZHANG Zhao, MATHEW Jithin, JAHAN Nusrat, STENGER John. Distinguishing Volunteer Corn from Soybean at Seedling Stage Using Images and Machine Learning [J]. Smart Agriculture, 2020, 2(3): 61-74. |
| [7] | LIU Tianlin, ZHU Xicun, BAI Xueyuan, PENG Yufeng, LI Meixuan, TIAN Zhongyu, JIANG Yuanmao, YANG Guijun. Hyperspectral Estimation Model Construction and Accuracy Comparison of Soil Organic Matter Content [J]. Smart Agriculture, 2020, 2(3): 129-138. |
| [8] | Zhou Chengquan, Ye Hongbao, Yu Guohong, Hu Jun, Xu Zhifu. A fast extraction method of broccoli phenotype based on machine vision and deep learning [J]. Smart Agriculture, 2020, 2(1): 121-132. |
| [9] | Zhou Chao, Xu Daming, Lin Kai, Chen Lan, Zhang Song, Sun Chuanheng, Yang Xinting. Evaluation of fish feeding intensity in aquaculture based on near-infrared machine vision [J]. Smart Agriculture, 2019, 1(1): 76-84. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||






