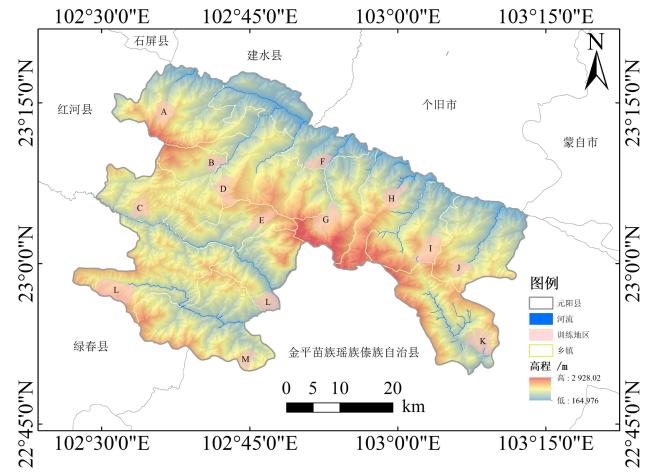
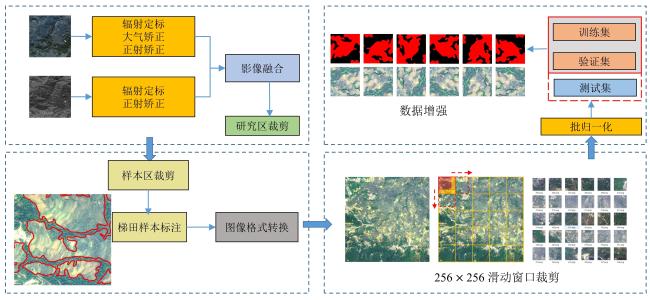
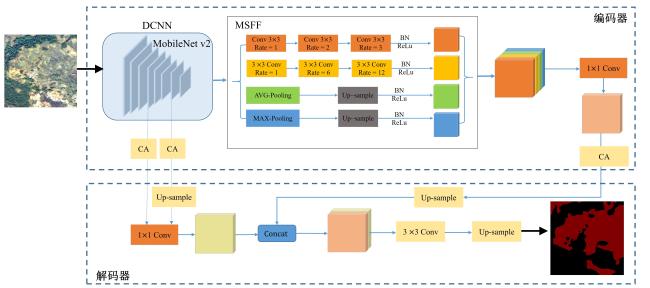
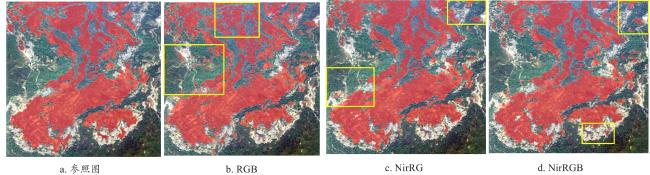
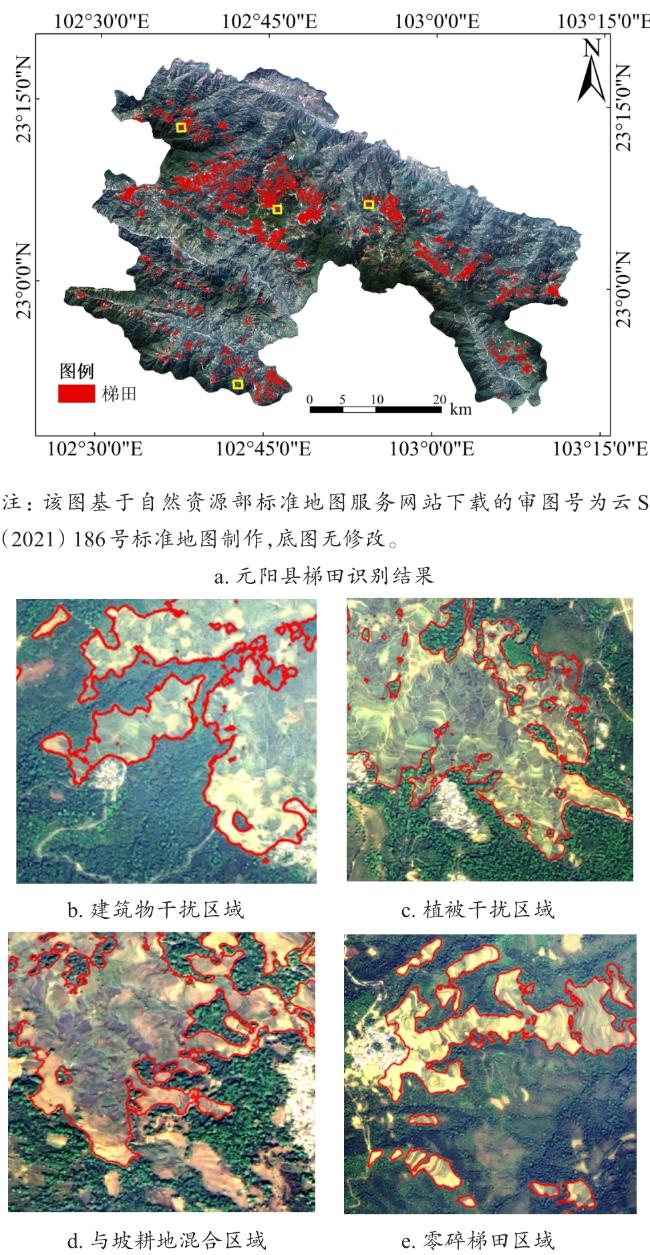
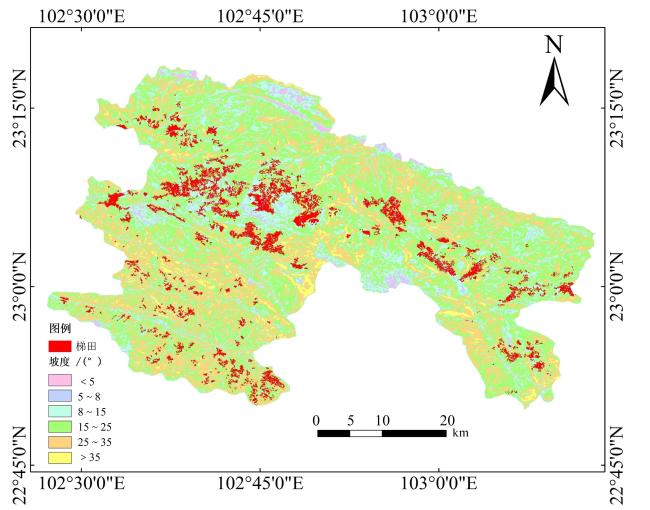
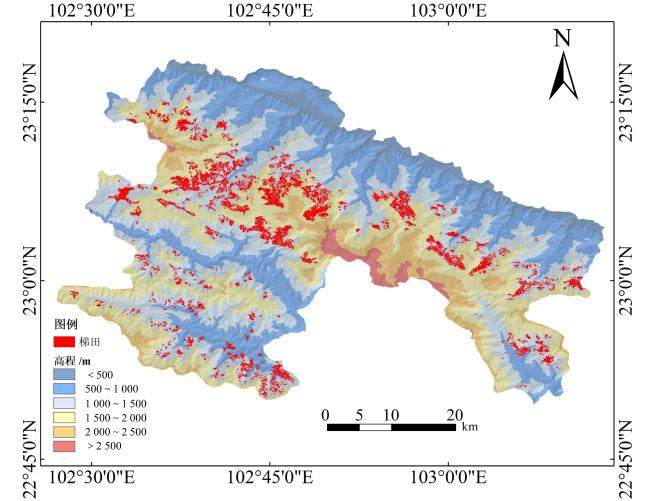
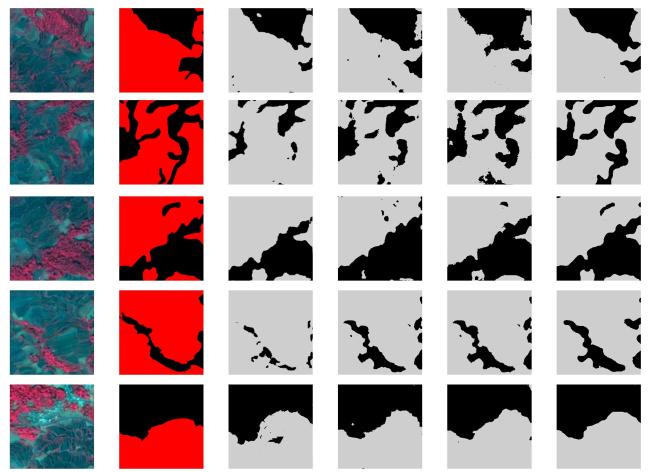
[Objective] The accurate estimation of terraced field areas is crucial for addressing issues such as slope erosion control, water retention, soil conservation, and increasing food production. The use of high-resolution remote sensing imagery for terraced field information extraction holds significant importance in these aspects. However, as imaging sensor technologies continue to advance, traditional methods focusing on shallow features may no longer be sufficient for precise and efficient extraction in complex terrains and environments. Deep learning techniques offer a promising solution for accurately extracting terraced field areas from high-resolution remote sensing imagery. By utilizing these advanced algorithms, detailed terraced field characteristics with higher levels of automation can be better identified and analyzed. The aim of this research is to explore a proper deep learning algorithm for accurate terraced field area extraction in high-resolution remote sensing imagery. [Methods] Firstly, a terraced dataset was created using high-resolution remote sensing images captured by the Gaofen-6 satellite during fallow periods. The dataset construction process involved data preprocessing, sample annotation, sample cropping, and dataset partitioning with training set augmentation. To ensure a comprehensive representation of terraced field morphologies, 14 typical regions were selected as training areas based on the topographical distribution characteristics of Yuanyang county. To address misclassifications near image edges caused by limited contextual information, a sliding window approach with a size of 256 pixels and a stride of 192 pixels in each direction was utilized to vary the positions of terraced fields in the images. Additionally, geometric augmentation techniques were applied to both images and labels to enhance data diversity, resulting in a high-resolution terraced remote sensing dataset. Secondly, an improved DeepLab v3+ model was proposed. In the encoder section, a lightweight MobileNet v2 was utilized instead of Xception as the backbone network for the semantic segmentation model. Two shallow features from the 4th and 7th layers of the MobileNet v2 network were extracted to capture relevant information. To address the need for local details and global context simultaneously, the multi-scale feature fusion (MSFF) module was employed to replace the atrous spatial pyramid pooling (ASPP) module. The MSFF module utilized a series of dilated convolutions with increasing dilation rates to handle information loss. Furthermore, a coordinate attention mechanism was applied to both shallow and deep features to enhance the network's understanding of targets. This design aimed to lightweight the DeepLab v3+ model while maintaining segmentation accuracy, thus improving its efficiency for practical applications. [Results and Discussions] The research findings reveal the following key points: (1) The model trained using a combination of near-infrared, red, and green (NirRG) bands demonstrated the optimal overall performance, achieving precision, recall, F1-Score, and intersection over union (IoU) values of 90.11%, 90.22%, 90.17% and 82.10%, respectively. The classification results indicated higher accuracy and fewer discrepancies, with an error in reference area of only 12 hm2. (2) Spatial distribution patterns of terraced fields in Yuanyang county were identified through the deep learning model. The majority of terraced fields were found within the slope range of 8º to 25º, covering 84.97% of the total terraced area. Additionally, there was a noticeable concentration of terraced fields within the altitude range of 1 000 m to 2 000 m, accounting for 95.02% of the total terraced area. (3) A comparison with the original DeepLab v3+ network showed that the improved DeepLab v3+ model exhibited enhancements in terms of precision, recall, F1-Score, and IoU by 4.62%, 2.61%, 3.81% and 2.81%, respectively. Furthermore, the improved DeepLab v3+ outperformed UNet and the original DeepLab v3+ in terms of parameter count and floating-point operations. Its parameter count was only 28.6% of UNet and 19.5% of the original DeepLab v3+, while the floating-point operations were only 1/5 of UNet and DeepLab v3+. This not only improved computational efficiency but also made the enhanced model more suitable for resource-limited or computationally less powerful environments. The lightweighting of the DeepLab v3+ network led to improvements in accuracy and speed. However, the slection of the NirGB band combination during fallow periods significantly impacted the model's generalization ability. [Conclusions] The research findings highlights the significant contribution of the near-infrared (NIR) band in enhancing the model's ability to learn terraced field features. Comparing different band combinations, it was evident that the NirRG combination resulted in the highest overall recognition performance and precision metrics for terraced fields. In contrast to PSPNet, UNet, and the original DeepLab v3+, the proposed model showcased superior accuracy and performance on the terraced field dataset. Noteworthy improvements were observed in the total parameter count, floating-point operations, and the Epoch that led to optimal model performance, outperforming UNet and DeepLab v3+. This study underscores the heightened accuracy of deep learning in identifying terraced fields from high-resolution remote sensing imagery, providing valuable insights for enhanced monitoring and management of terraced landscapes.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}