



0 引 言
Jaikumar等[6]以车速、加速度、车辆比功率和发动机转速等作为模型输入,构建了基于人工神经网络的车辆排放预测模型,试验结果显示模型预测值与实际测量值一致性指数达到0.9,预测结果与真实值较为吻合。Seo等[7]也基于人工神经网络,以车速、发动机转速、发动机负荷等车辆行驶特征参数为输入,构建了车辆CO2排放预测模型,预测误差小于1%。Rivera-Campoverde等[8]考虑车速、加速度和发动机转速等车辆行驶特征参数,基于人工神经网络构建了车辆CO2和NOx等污染物预测模型,并结合碳排放实测数据验证了两者预测精度均达到98%。李昌庆和谢小平[9]以速度、加速度和比功率等为神经网络输入,构建了车辆尾气CO2、CO和NOx排放量的预测模型,三种气体预测相对误差均低于3.8%。上述相关研究主要针对普通车辆,且仅考虑车辆行驶特征参数,而冷藏配送车辆碳排放除受行驶特征参数影响之外,也受制冷参数、货物重量等因素影响[10]。此外,Akintomide等[11]也表明车辆碳排放量与拥堵状况呈显著正相关性[12],拥堵状态下车辆产生的碳排放量为非拥堵的5至9倍。据本课题组深入研究表明,目前仍严重缺乏多源信息融合下冷藏配送车辆碳排放动态预测模型,尚未充分揭示路况条件、行驶特征、制冷参数等对车辆碳排放的综合影响机制[13, 14],该方面研究可为提升冷链配送碳排放预测精度、合理制定碳减排策略及促进低碳冷链配送发展等提供理论基础与依据。
综上,本研究以冷藏配送车辆为研究对象,综合考虑车辆运行参数、制冷参数、货物重量和路况信息等多源信息,构建冷藏车辆碳排放动态预测模型,实现对冷藏车配送过程中尾气碳排放进行动态测算。首先,构建基于改进YOLOv8s的路况信息识别模型,准确提取道路不同类型车辆数量与像素面积占比。其次,以车辆行驶速度、加速度、货物重量、制冷温度、制冷机功率和路况信息等为输入,构建基于改进iTrasnformer算法的冷藏车辆碳排放动态预测模型。最后,与其他模型进行对比分析,分别验证基于改进YOLOv8s的路况信息识别模型与基于改进iTransformer的碳排放预测模型的性能。
1 数据采集与处理
1.1 数据采集方法
选用车厢长度7.6 m×2.4 m×2.4 m的冷藏车为实验对象,在北京市某主干路上,分别进行正常行驶与制冷两种工况下视频数据采集,车辆行驶里程总共为2 973 km。为确保路况视频视角全方面覆盖道路行驶车辆,视频采集设备安装于车头挡风玻璃的中心位置(图1a)。视频采集设备采用360品牌G300型号行车记录仪,其参数为:单目镜像素200万,分辨率1 080 P,视频帧率30帧/s。车辆尾气CO2监测设备选用贝斯安智能CO2在线检测仪(图1b),其参数为:量程0~50 %VOL,精度±0.5 %VOL,云端上传频率1次/s。通过车辆行驶记录仪记载冷藏配送车辆每秒的行驶速度与加速度,使用温湿度传感器采集冷藏车厢内的温度,通过控制单元记录冷藏车制冷机组功率。

1.2 车辆图像数据处理
路况视频数据时长共选取1 264 min,分成V1和V2两个数据集。其中V1时长有712 min,从中随机截取不同场景和时刻下的4 238张图片,用于训练路况信息提取模型,按照8∶1∶1的比例随机划分成训练集、验证集和测试集,部分样本如图2所示。然后从剩余的552 min视频数据集V2中每秒随机截取一帧图像,用于提取路况信息(轿车、公交车、货车数量以及各类车辆的像素面积占比),作为冷藏车碳排放预测模型的路况信息特征。

1.3 车辆碳排放数据处理
由于CO2在线检测仪在采集或者无线传输时出现数据丢包,在V2对应时刻下的CO2碳数据仅回传了32 048条,其中1 072条数据缺失,通过均值插值算法对缺失数据进行补全,将数据缺失值所在位置前后十个数据的均值补充给缺失值,计算如公式(1) 所示。
式中: 为第i个缺失值; 为缺失值第j个位置上的数据。
异常数据处理完成后,总共有33 120条碳排放数据。将每条碳排放数据接收时刻下冷藏车辆的行驶速度、加速度、货物质量、制冷温度、制冷机功率和路况信息作为输入,碳排放量为输出构建碳排放时序数据集,划分成80%的训练集、10%的验证集和10%的测试集。
2 算法模型构建
2.1 路况信息识别模型
2.1.1 YOLOv8s
YOLOv8s是当前YOLO系列中的新模型,在YOLOv5模型和YOLOv7基础上进行了改进,目标检测性能最为突出。YOLOv8s模型主要由主干网络、颈部结构和检测头组成。主干网络由CBS(Convolution Batch SiLU)、C2f(CSPDarknet53 to 2-stage FPN)和SPPF (Spatial Pyramid Pooling Fast)结构组成。CBS通过普通卷积、批归一化和SiLU激活函数构成,用于提取局部空间特征。C2f将高级特征与上下文语义信息结合,丰富模型的梯度流[15]。SPPF通过池化操作将不同尺度的局部特征和全局空间特征进行融合,增强模型对目标特征提取能力[16]。颈部结构用于对从主干网络中提取到的特征进行融合,由特征金字塔和路径聚合网络组成,通过自顶向下和自下而上跨层次连接方式确保特征充分融合[17]。检测头使用解耦头和无锚框结构,通过三种尺度的特征图进行目标的分类和位置信息的确认[18]。
2.1.2 全维度动态卷积
YOLOv8s使用普通二维卷积生成特征,滤波器的卷积核不会因输入的不同而改变,若要获取不同的特征,需要增加滤波器的数量,这样会降低模型运算效率。为解决这个问题,使用全维度动态卷积(Omni-Dimensional Dynamic Convolution,ODConv)[19]替换C2f模块中Bottleneck的常规卷积。ODConv通过并行策略引入多维注意力机制,学习四种互补注意力。在空间维度、输入维度、输出维度和卷积核进行不同维度的特征学习,使模型学习到不同维度的差异性,充分捕获上下文关键信息,提高特征提取能力。 ODConv在处理过程中首先将特征经全局平均池化输入到全连接和线性整流函数(Rectified Linear Unit, ReLU)激活函数中,然后通过全连接和Sigmoid激活函数产生四种权重,最终由滤波器加权和组成输出特征。ODConv可以在不增加网络宽度和深度情况下得到更准确的识别模型[20]。将改进后的瓶颈层(Bottleneck)定义为Bottleneck-ODC,改进后的C2f模块定义为C2f-ODC,其结构分别见图3和图4。


2.1.3 渐近特征金字塔网络
由于道路图像背景复杂,且存在许多噪声,YOLOv8s模型在高层特征与低层特征交互过程中,易使高层特征的语义信息和低层的详细信息丢失,削弱了非相邻尺度的特征融合效果。因此,引入渐近特征金字塔网络(Asymptotic Feature Pyramid Network, AFPN)[21],使模型在特征提取过程中首先融合低层特征,然后逐渐融入高层特征。由于不同尺度间直接交互,缩小非相邻尺度间的语义差距,充分融合高层语义信息与低层详细信息,避免多级传输中关键信息的丢失。
AFPN在多级特征融合过程中,利用自适应空间特征融合(Adaptively Spatial Feature Fusion, ASFF)[22]为不同层级特征分配各自的空间权重,增强对关键特征的关注力。令 表示为从第m层到第n层的(i,j)位置的特征向量,将通过特征向量 , 和 线性组合获得的结果特征向量表示为 ,如公式(2) 。
式中: 、 和 分别表示3个级别特征在第n层特征的空间权重,且 。
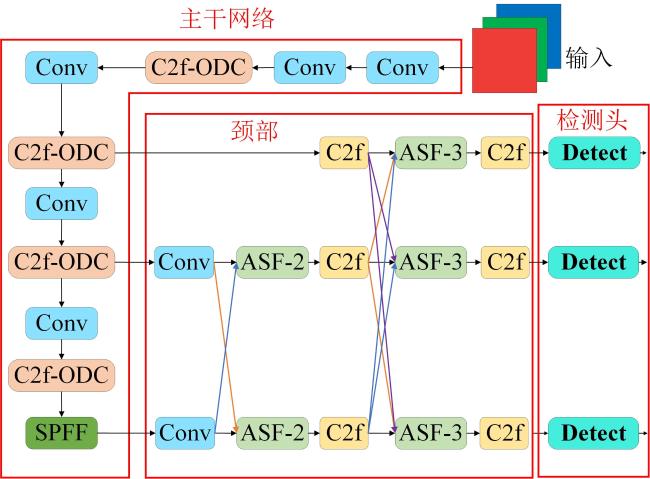
2.1.4 YOLOv8s-OA
改进后的模型命名为YOLOv8s-OA,结构如图5所示,在主干网络中引入全维动态卷积模型以生成更多特征,增强主干网络的特征提取能力。在颈部结构中引入渐进特征金字塔网络以保留多级特征融合过程中的重要特征信息,在非相邻层次上直接作用进行特征融合,避免交互过程中特征信息的丢失,提升特征融合效率。
本研究中路况信息提取过程:通过YOLOv8s-OA识别出道路上的车辆,统计每类车辆数量,同时根据车辆检测框计算各种类型车辆像素面积占比,计算如公式(3) 所示。
式中:i为车辆类别,如轿车、公交车或货车;n为图像中i类车辆的数量,辆;Z为图像的像素面积,pixel;Wij 为图像中车辆类型为i的第j车辆检测框的水平像素;Hij 为图像中车辆类型为i的第j车辆检测框的垂直像素; 为图像中i类车辆的像素面积占比。
2.2 碳排放预测模型
2.2.1 iTransformer
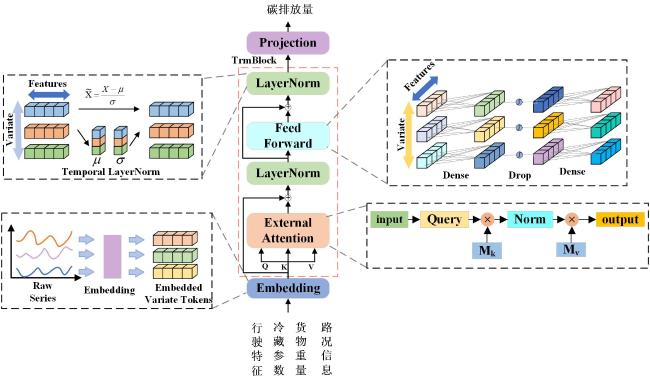
Liu等[23]提出一种倒置新思路,将同一个变量的整条时间序列数据映射成高纬度特征表示,以变量为描述主体独立反映其历史变化过程。通过注意力模块对变量间的相关性进行建模,使用前馈网络在时间维度上逐层对历史特征进行编码,将学习到的特征映射到未来的预测结果中。保留了变量原本的独立性,拓宽模型的感受野,在长期序列预测中表现更为优异。
2.2.2 外部注意力机制
iTransformer中自注意力层通过所有位置的成对亲和力计算特征加权来更新每个位置上的特征,以捕获单个样本中的长期依赖。然而,自注意力机制具有二次计算复杂度,且忽略了不同样本间的潜在相关性。Guo等[26]提出了一种外部注意力机制(External Attention, EA),通过线性层和归一化层来实现,具有线性复杂性,同时考虑所有数据样本之间的隐含相关性,可有效取代自注意力机制。首先计算查询向量与键向量之间的亲合度,得到注意力特征图,然后经过归一化,最后与值向量相乘得到更加精细的特征图。
2.2.3 iTransformer-EA
2.3 相关性分析
采用皮尔逊相关系数(Pearson Correlation Coefficient, )对比分析冷藏车辆碳排放与不同影响因子之间的相关性,验证模型输入参数选取的必要性与关键性,其计算如公式(4) 所示:
式中:cov(p,q)为碳排放影响因素p和q的协方差; 和 分别是p和q的标准差;E(p)和E(q)分别是p和q的期望。 取值范围为[-1,1],越接近0则认为两个影响因素间无相关性,越接近1表示两者具有强正相关性,越接近-1表示两者负相关性越强。
2.4 实验环境和参数
本研究采用的硬件设备包括Intel(R) Xeon(R) CPU E5-2650 v4 @ 2.20 GHz处理器,运行内存为128 GB,显卡为NVIDIA TESLA K80,显存为12 GB。软件平台为Linux 3.10.0操作系统,Python 3.8.16和Pytorch 2.0.1。YOLOv8s-OA训练输入图像像素大小调整为640×640,训练epochs设置为100次,批处理大小为16,使用预训练的权重文件进行迁移学习,学习率设置为0.001,使用AdamW优化器进行权重优化。iTransformer-EA算法中TrmBlock数量为4,编码层中特征维度设置为512,前馈神经网络层中dropout设置为0.3,训练学习率为0.001,使用Adam优化器,训练epochs为200次。
2.5 性能评价指标
为评估YOLOv8s-OA模型识别性能,选择精确率(P)、召回率(R)、平均精度均值(mean Average Precision, mAP)、检测速度(Frames Per Second, FPS)、模型参数量和运算量作为评价指标。精确率衡量模型在检测为正样本中真正是正样本的正确率,召回率表示模型检测为正样本占所有正样本的比例,平均识别精度综合考虑了模型在不同类别上的检测性能,这三种评价指标的数值越高表明模型的检测性能越优异。参数量是指模型需要训练的参数总量,运算量衡量模型复杂度。选用均方误差(Mean Square Error, MSE)、平均绝对误差(Mean Absolute Error, MAE)、均方根误差(Root Mean Square Error, RMSE)和决定系数(R 2)作为iTransformer-EA碳排放预测的评价指标。MSE、MAE、RMSE和R 2通过计算碳排放真实值和模型预测值之间的差异衡量出模型的预测性能,MSE、MAE和RMSE数值越小表示模型预测越接近真实值,模型的预测能力越优,而R 2越大表明碳排放预测模型拟合效果越好,各性能评价指标计算公式分别见文献[27]和[28]。
3 结果与分析
3.1 车辆碳排放影响因子的相关性分析
表1给出了车辆碳排放与其影响因子之间的皮尔逊相关系数,其中车辆行驶参数的平均每相关性系数最高(0.841),其次为货物重量(0.807)、路况信息(0.706)和制冷参数(0.682)。相比制冷参数、货物重量和路况信息,车辆行驶参数是影响车辆碳排放强度的主要因素。相比车辆制冷参数,路况信息与车辆碳排放之间具有更强的相关性。而制冷参数与车辆碳排放影响因子的相关性均处于0.67以上,为进一步确保车辆碳排放预测模型的准确性,本研究将其也选为碳排放预测模型输入参数。
表 1 车辆碳排放与其影响因子之间的皮尔逊相关系数Table 1 Pearson correlation coefficient between vehicle carbon emissions and their impact factors |
| 影响参数 | 表征因子 | 相关系数 | 平均相关系数 |
|---|---|---|---|
| 行驶 | 速度 | 0.869 | 0.841 |
| 加速度 | 0.813 | ||
| 制冷 | 制冷温度 | 0.672 | 0.682 |
| 制冷功率 | 0.691 | ||
| 货物 | 货物重量 | 0.807 | 0.807 |
| 路况 | 车辆数量 | 0.726 | 0.706 |
| 像素面积占比 | 0.685 |
3.2 不同路况信息识别模型性能比较
为验证YOLOv8s-OA的路况信息识别的有效性,选择YOLOv8s、YOLOv7-X、YOLOv5s、Faster-RCNN(Region with CNN features)和SSD(Single Shot MultiBox Detector)等算法进行识别性能对比,结果如表2所示。可以看出,在精确率、召回率和平均精度均值方面,YOLOv8s-OA表现最优,SSD算法识别性能最差。本研究提出的YOLOv8s-OA的精确率可以达到98.1%,分别比YOLOv8s、YOLOv7-X、YOLOv5s、Faster-RCNN和SSD高出1.2%、2.6%、5.3%、8.9%和17.5%。YOLOv8s-OA的召回率为95.5%,比上述5种对比模型分别高出3.7%、4.6%、7.2%、11.3%和19.2%。YOLOv8s-OA的mAP0.5高达98.4%,与另外5种对比模型相比,分别高出0.2%、2.3%、4.8%、11.7%和19.4%。在参数量方面,YOLOv8s-OA有9.8 M,虽然比YOLOv5s增加了6.5%,但比YOLOv8s、YOLOv7-X、Faster-RCNN和SSD分别减少了12.5%、86.2%、76.9%和37.2%。YOLOv8s-OA的运算量最低,比5种对比模型分别减少了31.4%、89.0%、17.9%、83.4%和18.6%。在检测速度方面,YOLOv8s-OA模型的检测速度最快,比YOLOv8s提升了5.4%。综上可以得出,改进后的YOLOv8s-OA模型在识别精度、模型大小和识别速度等方面表现良好,能够满足车载视角下对路况信息识别的需求。
表 2 不同深度学习算法对路况信息识别性能结果Table 2 Recognition results of road condition information by different deep learning algorithms |
| 模型 | 精确率/% | 召回率/% | mAP0.5/% | 帧率/FPS | 参数量/M | 运算量/GFLOPS |
|---|---|---|---|---|---|---|
| SSD | 83.5 | 80.1 | 82.4 | 31 | 15.6 | 24.2 |
| Faster-RCNN | 90.1 | 85.8 | 88.1 | 19 | 42.5 | 118.6 |
| YOLOv5s | 93.2 | 89.1 | 93.9 | 32 | 9.2 | 24.0 |
| YOLOv7-X | 95.6 | 91.3 | 96.2 | 11 | 70.9 | 178.3 |
| YOLOv8s | 96.9 | 92.1 | 98.2 | 37 | 11.2 | 28.7 |
| YOLOv8s-OA | 98.1 | 95.5 | 98.4 | 39 | 9.8 | 19.7 |
图7直观呈现了不同深度学习模型的路况信息识别结果,各识别模型均能准确识别出近处的车辆。在识别远处小目标车辆时,SSD、Faster-RCNN、YOLOv5s和YOLOv7出现严重的误判和漏判现象。SSD在图7a和图7b中未识别出远处的轿车,同时将货车误识别为轿车,在7c中未识别出货车;Faster-RCNN在图7a、图7b和图7c中将货车误识别为轿车,将图7c阴影部分错误识别为轿车。YOLOv5s在图7a中漏判一辆轿车,在图7b中将公交车误识别为轿车,在图7c中将货车误识别为轿车。YOLOv7-X在图7a中漏判一辆轿车,在图7b图中将公交车误识别为轿车。上述4个模型均易在小目标车辆识别情况下出现严重失误,YOLOv8s模型在图7a中未识别出远处的一辆轿车,而YOLOv8s-OA能准确识别出道路上所有车辆,在小目标和遮挡车辆识别情况下表现良好。
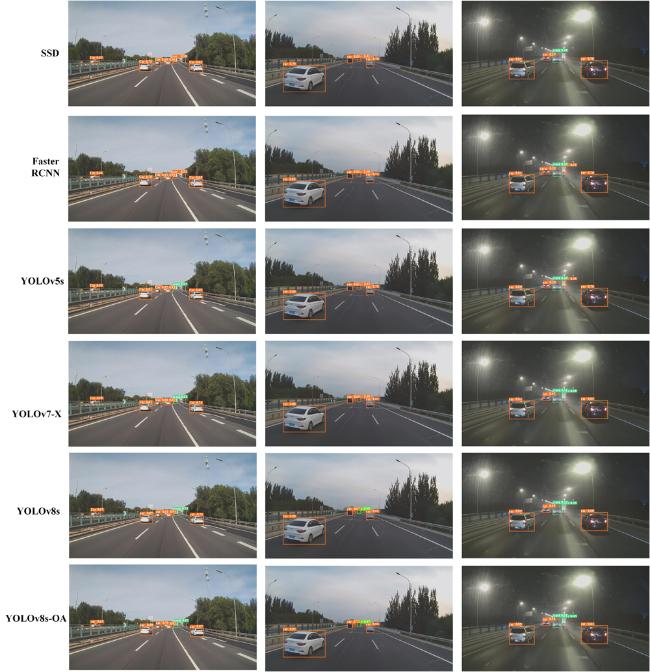
表3为不同模块对路况识别的消融实验结果,YOLOv8s-ODConv为仅在YOLOv8s中加入全维度动态卷积模块,YOLOv8s-AFPN为仅在YOLOv8s中引入渐近特征金字塔网络模块。在只引入一个模块的情况下,YOLOv8s-ODConv的精确率、召回率和平均识别均值分别比YOLOv8s提升了1.4%、3.0%和0.1%,参数量降低了0.27%,模型运算量减少了20.6%,图像处理速度提升了2.7%。大幅度提升了路况信息识别的准确率,这是因为通过全维度动态卷积进行跨维度特征学习,充分捕获到关键信息,提升模型特征提取能力。与YOLOv8s相比,YOLOv8s-AFPN精确率和召回率分别提升了1.0%和3.4%,mAP降低了0.2%,参数量和运算量大幅缩减,分别降低了18.8%和33.4%,图像处理速度提升了5.4%,加入AFPN结构后通过渐进式逐步融合不同等级间信息,充分保留重要特征信息,提高模型的识别精度。可以看出,引入ODConv和AFPN后的YOLOv8s-OA在召回率上分别比YOLOv8s、YOLOv8s-ODConv和YOLOv8s-AFPN提升了3.7%、0.4%和0.3%,参数量上仅比YOLOvs-AFPN增加了7.7%,比YOLOv8s、YOLOv8s-ODConv分别减少了12.5%和10.1%,总体来看,YOLOv8s-OA的路况信息识别性能最优。
表 3 路况信息识别研究不同模块的消融试验结果Table 3 Ablation test results of different modules for road condition information recognition study |
| Model | 精确率/% | 召回率/% | mAP0.5/% | 帧/FPS | 参数量/M | 运算量/GFLOPS |
|---|---|---|---|---|---|---|
| YOLOv8s | 96.9 | 92.1 | 98.2 | 37 | 11.2 | 28.7 |
| YOLOv8s-ODConv | 98.3 | 94.9 | 98.3 | 38 | 10.9 | 22.8 |
| YOLOv8s-AFPN | 97.9 | 95.2 | 98.0 | 39 | 9.1 | 19.1 |
| YOLOv8s-OA | 98.1 | 95.5 | 98.4 | 39 | 9.8 | 19.7 |
表4为通过人工对行车图像中路况信息进行统计的结果,可以看出在车辆数量特征中,轿车数量变化浮动最大,在像素面积占比特征中,轿车像素面积占比浮动最大,这是由于测试道路中的车辆主要以轿车为主,轿车流量较大,而公交车和货车较少。为验证不同路况下车辆碳排放预测模型的精度,将车辆数量与像素面积占比之和定义为拥堵指数,并据此设定四种路况等级,其中路况指数小于8.4为畅通等级,处于[8.4, 15.9]为轻度拥堵,处于[15.9, 28.4]为中度拥堵,而大于28.4为严重拥堵。
表 4 基于YOLOv8s-OA模型路况信息统计结果Table 4 Statistical results of road condition information based on the YOLOv8s-OA model |
| 特征 | 车辆数量 | 像素面积占比 | ||||
|---|---|---|---|---|---|---|
| 轿车/辆 | 公交车/辆 | 货车/辆 | 轿车像素面积占比/% | 公交车像素面积占比/% | 货车像素面积占比/% | |
| 最小值 | 2 | 0 | 0 | 1.9 | 0 | 0.0 |
| 最大值 | 11 | 2 | 3 | 33.6 | 8.9 | 10.3 |
3.3 车辆碳排放预测模型的性能比较
为验证iTransformer-EA模型的碳排放预测性能,选择长短时记忆网络(Long Short Term Memory, LSTM )、门控循环单元(Gated Recurrent Unit, GRU)、时域卷积网络(Temporal Convolutional Network, TCN)、Transformer和iTransformer等模型在测试集上进行比较。碳排放预测结果如图8所示,iTransformer-EA预测曲线最接近真实的碳排放曲线,拟合效果最佳,其次是iTransformer、Transformer和TCN,而GRU和LSTM模型波动较大,拟合曲线效果差。
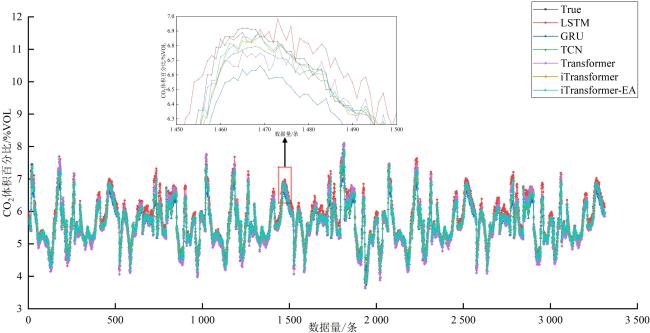
表5为不同模型性能评估指标结果,iTransformer-EA的各项评价结果均优于其他对比模型,MSE、MAE、RMSE分别为0.026 1 %VOL、0.079 1 %VOL和0.161 5 %VOL,分别比iTransformer降低了0.4%、15.3%和8.7%,R 2达到了0.940 0,比iTransformer提高了1.3%,表明引入外部注意力可以提高iTransformer模型对碳排放时序数据非线性依赖关系的捕获能力,加强对重要特征的学习,提升对冷藏车辆碳排放数据的预测精度。
表 5 冷藏车辆碳排放动态预测模型评价结果Table 5 Evaluation Results of Carbon Emission Dynamic Prediction Model for Refrigerated Vehicles |
| Model | MSE/ %VOL | MAE/ %VOL | RMSE/%VOL | R 2 |
|---|---|---|---|---|
| LSTM | 0.057 1 | 0.164 5 | 0.238 9 | 0.868 5 |
| GRU | 0.052 4 | 0.153 5 | 0.228 9 | 0.879 2 |
| TCN | 0.045 8 | 0.127 8 | 0.214 2 | 0.894 3 |
| Transformer | 0.039 2 | 0.130 9 | 0.198 0 | 0.909 7 |
| iTransformer | 0.030 1 | 0.093 4 | 0.176 8 | 0.928 0 |
| iTransformer-EA | 0.026 1 | 0.079 1 | 0.161 5 | 0.940 0 |
表6展示了不同路况下冷藏车辆碳排放预测模型准确性,可以看出,在畅通等级下车辆碳排放预测结果的准确性最低,其MSE、MAE、RMSE和R 2分别为0.027 2 %VOL、0.079 6 %VOL、0.163 4 %VOL和0.934 1。随着道路拥堵的加剧,模型的预测精度逐步提升,相比畅通等级,严重拥堵下冷藏车辆碳排放预测精度达到最高。其MSE、MAE、RMSE和R 2分别提升了7.7%、3.5%、2.5%和1.7%。这种结果主要归因于随道路拥堵等级加剧,路况信息对冷藏车辆碳排放的影响随之加强,使之更易突显路况信息及其他影响因素之间联合作用,使得冷藏车辆碳排放预测模型精度显著提升。
表 6 不同路况下冷藏车辆碳排放预测结果Table 6 Carbon emission prediction results for refrigerated vehicles under different road conditions |
| 路况 | MSE/vol% | MAE/vol% | RMSE/vol% | R 2 |
|---|---|---|---|---|
| 畅通 | 0.027 2 | 0.079 6 | 0.163 4 | 0.934 1 |
| 轻度拥堵 | 0.026 9 | 0.078 3 | 0.162 0 | 0.938 6 |
| 中度拥堵 | 0.026 3 | 0.077 4 | 0.160 4 | 0.943 7 |
| 严重拥堵 | 0.025 1 | 0.076 8 | 0.159 3 | 0.950 1 |
4 结 论
本研究以城市生鲜冷链配送车辆为研究对象,基于YOLOv8s目标识别模型构建了路况信息识别模型,并以车辆行驶速度、加速度、货物重量、制冷温度、制冷功率和路况信息等多源信息为输入,构建基于iTransformer的碳排放预测模型。通过与其他模型展开对比分析,分别验证了YOLOv8s-OA路况信息识别模型和iTransformer-EA碳排放预测模型的准确性与可靠性。
首先,通过冷藏车辆碳排放影响因子相关性分析得出,行驶参数对车辆碳排放的影响最重要,其次为货物重量,路况因与行驶参数具有较强的相关性,所以对碳排放具有重要影响,虽然制冷参数对碳排放的影响较低,但均高于0.67以上,验证出所选碳排放预测模型输入参数的必要性。
然后,通过与YOLOv8s、YOLOv7、YOLOv5s、Faster-RCNN和SSD模型的对比实验得出:YOLOv8s-OA路况信息识别模型的识别精确率、召回率与平均精度均值分别高达98.1%、95.5%和98.4%,均优于对比模型。模型的参数量与运算量分别为9.8 M和19.7 GFLOPS,图像处理速度为39帧/s。在小目标车辆识别实验中,其他模型均出现不同程度的漏检和误检情况,而YOLOv8s-OA模型依然可以准确识别出小目标和受遮挡车辆,展现了显著优势,说明通过全维度动态卷积和渐进特征金字塔可以改善模型的特征提取和融合能力,保障模型对路况信息识别的准确性。
最后,通过与LSTM、GRU、TCN、Transformer与iTransformer模型进行对比可知:iTransformer-EA碳排放预测模型的预测结果与实际碳排放数据最接近,MSE、MAE、RMSE和R 2分别达到了0.026 1 %VOL、0.079 1 %VOL、0.161 5 %VOL和0.940 0,预测结果均优于对比模型,并且随着道路拥堵等级的加剧,模型预测精度逐步提升可实现冷链配送碳排放的动态精准预测。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}