



0 引 言
叶片模型是植物生长模型的重要组成部分,植物生长中的物理化学过程与叶片的形状和结构密切相关,重建叶片的三维结构,可以将更精确的几何细节整合到叶片模型中,从而更准确地模拟植物与环境之间的物质和能量交换,对于模拟植物光合作用和分析作物生长具有重要意义,近年来该方面的研究愈发受到重视[1, 2]。以GreenLab为代表的功能-结构植物模型(Functional-Structural Plant Model, FSPM)应运而生,该模型考虑了植物形态结构对生长的影响,并构建了一套依赖于源器官(如叶片)几何参数的资源分配方案,以模拟不同器官之间的资源竞争[3-5]。然而,该模型对叶片器官的结构建模较为简化,基于经验的数量关系将叶面积折算为光合生产速率。
目前,叶片三维建模方法分为重建和生成两大类。重建方法通过采集实测数据,使用直接三角剖分[6]、泊松重建[7]、NURBS(Non-Uniform Rational B-Splines) 曲面拟合[8, 9]等方法,专注于对真实叶形进行精准地还原,以及表型特征的提取。例如,Wu等[10]对小麦点云进行了直接三角网格化,在此基础上实现了叶片语义信息的提取以及网格参数化重建。Zheng等[11]使用骨架驱动的NURBS曲面结合网格变形方法实现了对小麦叶片的三维重建。Nagai和Tanaya[12]基于高斯混合模型利用可微函数重建光滑叶表面。Ando等[13]通过将无模型方法与有模型方法结合,通过捕获叶片的变形显著降低了噪声点和缺失点的影响,实现了高精度的树叶表面重建。这类方法通常能做到对目标曲面的精准重建,但对输入数据质量有较高的要求,且重建的结果需要较多的控制点或根本无法编辑,因而操作性较差。生成方法则是以植物学知识为基础,采用基于规则的方法,借助L-Studio[14]、OpenAlea[15]、GroIMP[16]等工具,专注于对叶片外形结构的快速生成。例如,Li等[17]在冠层光截获研究中借助FSPM生成玉米冠层。这类方法能够生成大量三维模型样本,广泛应用于FSPM中,但它们通常没有一个具体的现实参照物,难以评估现实个体与生成模型之间的差异。
与上述的两类方法相比,参数化建模方法在几何结构的显式和隐式描述之间取得了良好的折中。相比显式描述,它通过将目标关键几何特征进行参数化,从而能整体性地控制各个局部的形变;相比隐式方法,由于参数具备了明确的几何意义,对参数的估计过程可以显化。同时,这种方法精准描述了模型参数与三维结构之间的对应关系,不仅能构建极具视觉真实感的叶片三维模型[18, 19],同时该模型拥有良好的几何性质,参数化曲面上的任意一点都连续、可微,进而可以计算梯度、曲率等几何特征,也能以任意精度被采样以得到离散化的形式如点云、网格、体素,这将有利于实现叶片与环境互作的数值模拟。此外,通过对实测数据的时间序列进行参数反演,便能得到每个参数随时间的变化情况,有助于分析叶片三维结构的变化动态。Kempthorne等[20]曾使用离散平滑 -Spline对小麦叶片点云在Hsieh-Clough-Tocher基函数上进行了参数化,这是一种无模型的参数化重建方法,其参数化不具备与几何结构之间的互操作性。因此,本研究面向三维结构表示与数学模型参数之间的互操作性问题,围绕小麦叶形参数化重建需要关注的三个方面开展研究:1)参数驱动的模型结构构建;2)基于点云的模型参数反演估计;3)生长过程中的参数动态映射。
本研究目标是构造一个尽可能简单的参数化模型来描述小麦叶片的几何结构,使其在接近真实叶形的同时,建立叶片三维结构与模型参数间的双向映射,从而具备一定的从几何参数到点云的互操作性。为了实现该目标,本研究针对小麦叶形特点,提出一种参数曲面模型,仅由7个参数构建,通过RANSAC (RANdom Sample Consensus)回归方法估计模型参数,实现小麦叶片的三维几何结构参数化构建,该模型参数具备较明确的几何意义,同时可反演和可编辑,重建的三维模型具备良好的几何性质,实现小麦形态结构意义上的数字孪生。
1 材料与方法
本研究建立的双向映射、可互操作的小麦叶片结构模型具体方法步骤如下。
假设无组织点云表示的叶片曲面由 的映射 在叶片模型参数 下映射得到。通过构造一对互为逆操作的映射 和 ,并通过随机生成的样本参数 和实测点云反演的估计参数 ,经过双向验证和迭代,构建可互操作的小麦叶片点云模型。图1为小麦叶片三维模型构建的总框架技术路线图。
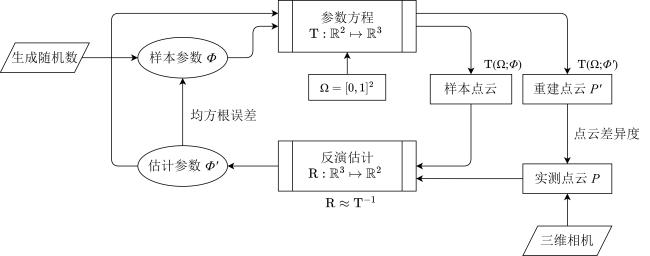
第一步,为使得数学模型与三维结构之间实现双向映射,即正向映射由模型参数 得到目标点云 ,反向映射由实测样本点云 得到估计参数 ,本研究基于参数最简化的原则,为叶片构建参数方程,该方程中含有的未知参数尽可能简单且有明确的几何意义,这便使得对参数的反演可以根据其几何意义反向构造;第二步,基于第一步构建的叶片方程,使用随机生成的参数生成三维点云,并构建参数的反向估计模块;最后,输入实测数据进行验证。本研究通过三维成像设备采集数据自制了小麦叶片点云数据集。
1.1 小麦叶片的参数化建模
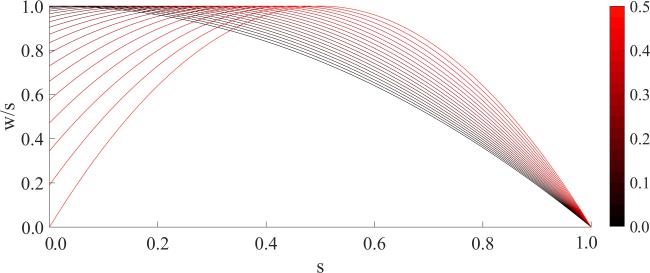
将小麦叶片于水平面上展平,观察叶片形状结构。首先可以将叶片由叶长 、最大叶宽 两个参数做近似描述,它们很大程度上决定了叶面积大小。其次考虑叶片边缘细节,小麦叶片呈线性披针形,使用二次函数 描述叶宽随中脉位置的变化,引入参数 表示达到最大叶宽的叶脉位置 , 的定义域与值域归一化到 ,结合叶片末端约束 ,根据以上约束得到方程如公式(1) 所示,作为叶形因子的 ,其意义为达到最大叶宽的叶长位置占总叶长的比例,如图2所示为 不同取值时的叶宽-叶长曲线。
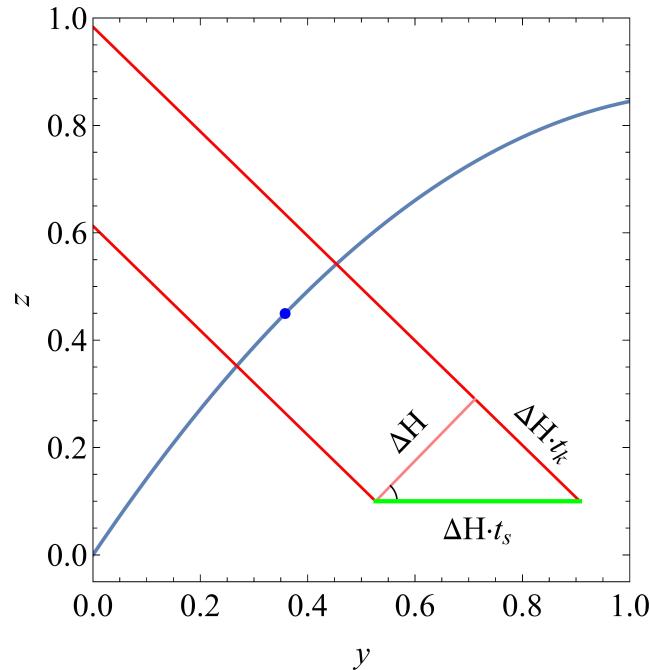
以上用最简化的3个参数表示平面上的小麦叶片,如果考虑其在三维空间上的表示,关键在于参数化叶中脉在空间中的轨迹。在不考虑叶片沿中脉轴卷曲形成的独特承重结构带来的复杂力学影响的前提下,本研究将理想叶片受重力作用下的自然弯曲使用二次函数表示[23],引入参数 为茎叶夹角,参数 为叶片末端到y轴上的投影位置,参数 为表征叶片弯曲程度的方程二次项系数。考虑z-y平面上的叶脉轨迹,令 ,叶脉方程表示如公式(2) 所示。
综合以上6个参数可以构造叶片三维曲面的参数方程,考虑参数空间为规则边界的区域 ,叶片末端在y轴上的投影为 ,并令 ,参数曲面上任意一点的坐标为 ,可由一对 唯一确定,叶片曲面的参数方程构造如公式(3) 所示。
在此基础上,考虑叶片长度 与叶片末端投影位置 之间存在如公式(4) 和公式(5) 的约束,上述6个参数中实际只有5个独立参数。
假设叶片弯曲系数 和茎叶夹角 已知,约束方程中的 和 可以互推。当需要通过仪器采集的数据拟合曲面参数时, 相比 更方便计算,且由 也可直接计算 ;当需要使用参数方程生成点云样本时,先验地估计参数 的范围往往能得到更合理的结果,此时通过牛顿迭代法来反求 ,如公式(6) 和公式(7) 所示。
由弧长-截距约束可得叶中脉的归一化位置 表达式如公式(8) 所示。
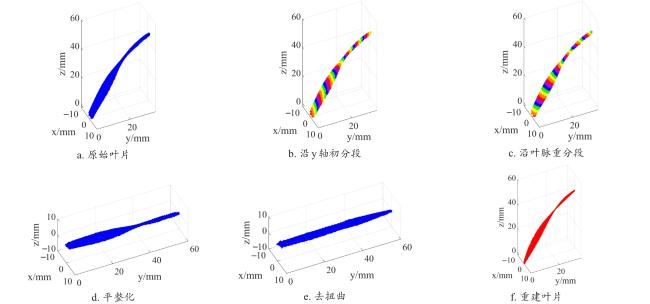
以上参数方程可以描述小麦叶片在只受重力自然弯曲状态下的三维结构,如图3a所示。
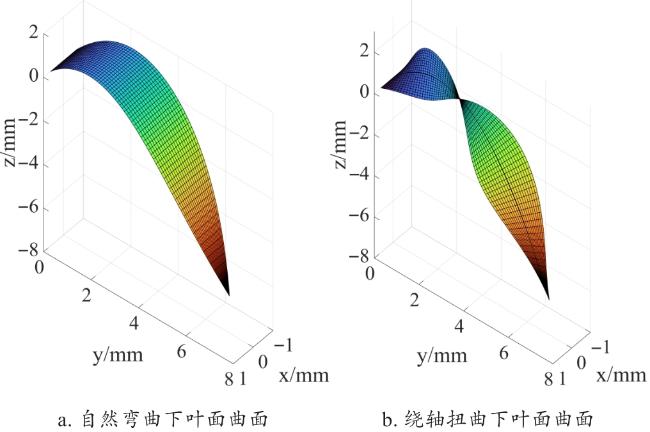
叶片在遭受风吹后,会以叶脉为轴发生扭转,这种变形在长条形的叶片中较为常见,本研究通过对曲面任意点位置 相对叶脉位置 绕叶脉切方向 做仿射旋转变换来描述,如公式(9) 所示。
遵循参数最简化原则,假设叶身的沿轴旋转与叶脉位置成线性关系,叶身总旋转角度为 ,并在叶片起始端旋转角度为 ,引入这两个参数后,任意位置处的旋转角 如公式(10) 所示。
应用罗德里格斯公式进行旋转变换,曲面上任意点的旋转后位置 如公式(11) 所示。
由于 与 正交,上式可简化为 ,如公式(12) 所示。设 为切线斜率,如公式(13) 所示。
综上,该曲面由最大叶宽 ,叶长 (叶尖投影 ),叶形因子 ,茎叶夹角 ,弯曲度 ,绕轴扭曲角 ,绕轴扭曲偏移角 ,共7个参数确定,由此建立的叶片模型具有相对清晰的几何意义,图3b为该参数方程描述的叶片三维结构实例。
1.2 曲面模型参数估计
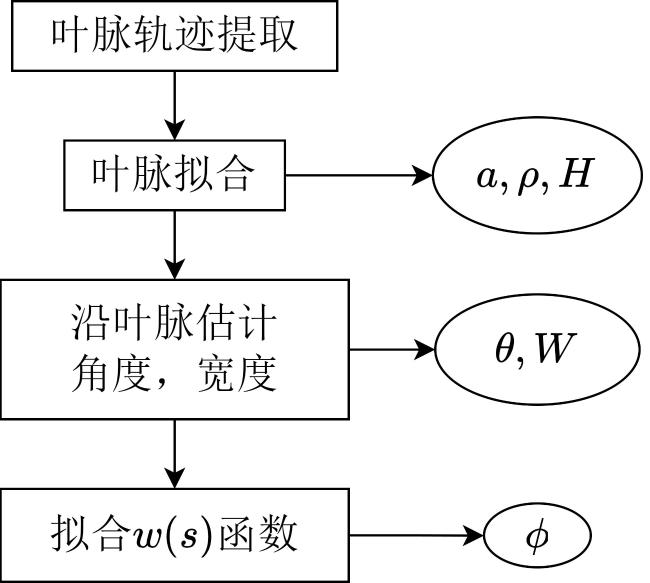
采用图4中的方法基于点云数据并对模型中的参数进行估计,并根据这组参数重建点云。由参数方程根据均匀分布的随机参数生成样本点云,并在样本点云中加入 的白噪声模拟实际测量误差,对生成的带噪声点云使用本节的算法估计模型参数,再将估计到的参数与原参数对比验证;对于实测点云数据,先通过参数估计模块得到模型参数,再通过参数方程模型重建三维点云,将重建点云与实测点云对比验证。
假定采集到的点云在叶片表面均匀分布,以叶片所在茎秆朝上为z轴正方向,以叶片到地面投影的方向为y轴正方向,建立坐标系。使用在 上均匀分布的随机数生成器,生成 组 坐标,代入参数方程得到形状为 的点云数组并加入满足分布 的白噪声。
叶脉作为叶片的骨架,很大程度上决定其形状,因此先对叶脉相关的参数进行估计。对点云以y轴方向进行均匀分段,假设点集为 ,分割段数为 ,两端点分别为 ,则分段点位置如公式(14) 所示。
其中每个分段区间中的点云如公式(15) 所示。
式中: 为第 个分段的点集。
计算各段点云的中心,估计叶脉位置,如公式(16) 所示, 为第 个分段的中心,其中 表示集合元素个数。
对叶脉二次模型公式(2) 做线性回归,在y-z平面上拟合叶脉参数 ,并通过公式(4) 计算叶脉长度 。
对每组分段点云,取 为 点云中心 处的切向量,且 ,以角度 旋转,对变换得到的点云在z轴上做零均值化,将叶脉展平到y轴,此时保留了 角的旋转,通过对各段点云做线性回归来估计 。为了表述方便,变换后第 段点云记作 。
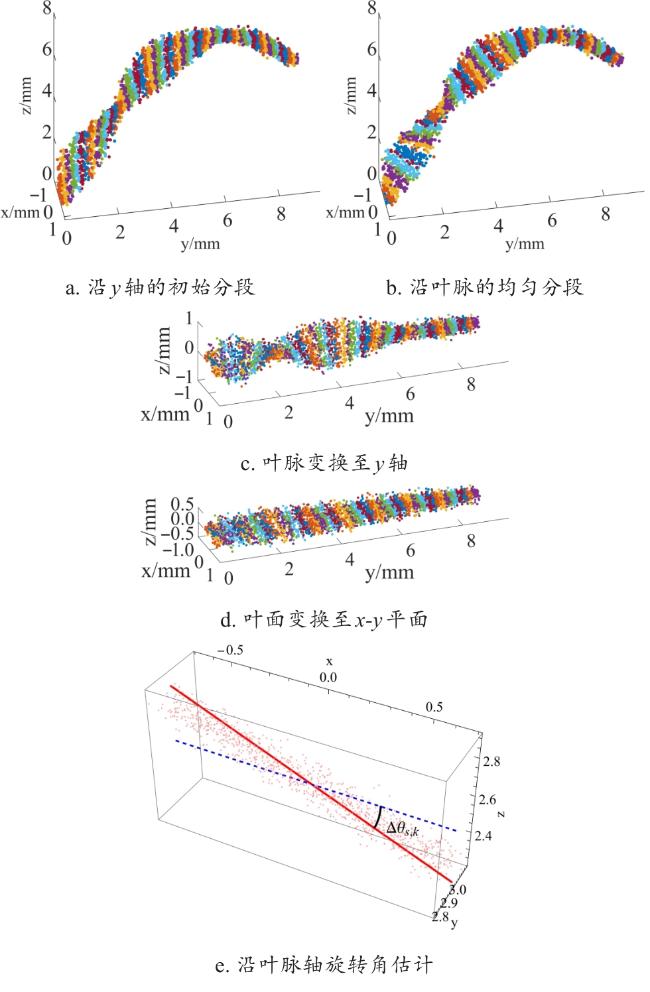
计算 的过程中,将点云沿叶脉旋转到x-y平面,估计x方向上最大最小值,做差,并由角度关系估计叶宽。假设 ,则第 个分段点云的估计叶宽 如公式(19) 所示。
对拟合的叶脉曲线公式(2) 在各段点云 的中心处采样得到叶脉累积长度 ,将其与 做线性回归估计 ,再与 做二次线性回归,估计 。由于实测数据中估计的 会因为茎叶连接部分的特殊结构而不稳定,因此使用RANSAC进行回归计算以减少叶片根部点云的噪声影响。
由于叶片根部与茎秆相接合的部分有特殊的几何结构,无法通过上述方法准确估计,利用回归得到的 的斜率,以及在叶脉的三分位点处的绝对 角计算回归直线的截距,从而得到初始值 。
1.3 叶片点云数据采集与处理
点云数据通过Revopoint Miraco采集,该设备采用结构光技术,单帧扫描精度达0.05 mm。品种选择郑麦136、扬麦34和盐麦1。其中郑麦136实验室栽培,选用含全氮0.68%、磷0.27%、钾0.36%的营养土种植,于4月9日播种,扫描 4月16日到6月23日小麦整株点云,每1~2日采样一次,共58个点云样本;扬麦34和盐麦1来自“无锡锡山太湖水稻示范园”的室外采集样本,采集时间2024年12月17日。扫描方法:将盆栽小麦置于旋转台,使用扫描设备录制。
原始点云数据经过MIRACO配套软件完成点云融合、孤立点剔除等预处理,图7为预处理后得到的小麦点云数据。由于采集数据时没有预设参照物,但是在较短的时间间隔下,植物生长引起的非刚性变化不明显,因此假定相邻时间间隔的两组点云之间近似刚性变换,通过迭代最近点(Iterative Closest Point)算法进行配准。以下为具体的预处理步骤,在Matlab中搭建处理管线,并使用CloudCompare为所有叶片打上标签。

1)利用颜色、位置信息,使用K-Means方法分割土壤部分与地上部分点云;
2)利用土壤点云拟合平面方程,将整体点云位置姿态变换到标准x-y平面;
3)将多日点云数据统一按1)和2)步骤处理,得到小麦点云序列 ;
4)依次对序列中相邻点云应用迭代最近点(Iterative Closest Point, ICP)算法进行配准,将 近似对齐到 ;
5)根据标签分割叶片点云,将叶片根部校准到坐标原点,将叶片在x-y平面投影的方位角变换到平行于y轴的正方向。
2 结果与分析
限于文章篇幅,本研究以郑麦136在结果部分展示模型的计算过程,最后利用扬麦34和盐麦1的最终估计误差验证模型对于其他小麦品种的通用性。
2.1 参数估计算法性能评估
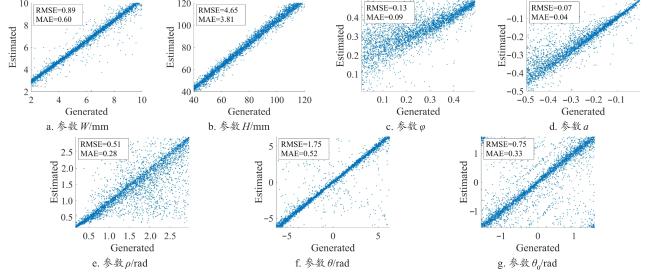
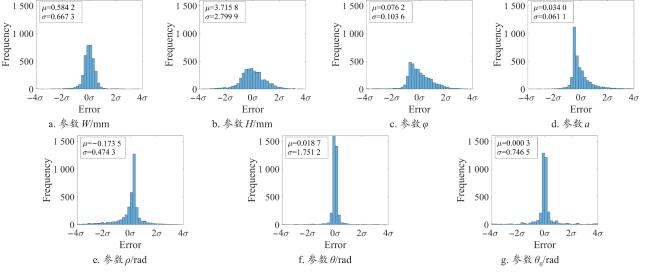
将随机参数生成点云作为样本验证参数估计算法性能,使用均方根误差(Root Mean Square Error, RMSE)和平均绝对误差(Mean Absolute Error, MAE)作为评估指标,所有参数采用各自单位表示,最大叶宽 (mm)、叶长 (mm)、叶形因子 (量纲为1)、弯曲度 (量纲为1)、茎叶夹角 (rad)、绕轴扭曲角 (rad),绕轴扭曲偏移角 (rad)。生成样本参数容量为4 000,横轴为生成参数值,纵轴为参数生成点云后反向估计参数值。
如图8所示,该方法对叶片最大宽度 、长度 、叶脉弯曲度 有着较为稳定的估计,但 在远离0时误差有变大趋势。叶形因子 的估计效果较差,倾向于被高估,仅在接近0.5的部分效果较好,茎叶夹角 在靠近0处效果较好,绕轴扭曲角 存在一些偏差较大的异常值,导致RMSE比较大。绕轴扭曲偏移角在左上和右下聚集点是由于对接近90°角分布的点云进行估计存在的偏差。
2.2 单叶片实测点云重建
图10展示了5个实测点云样本与重建点云的对照。从图像中可以看到,第2叶末端稍有偏差,其他叶片估计效果都较好,实测点云(蓝)与生成点云(红)很好地逼近。
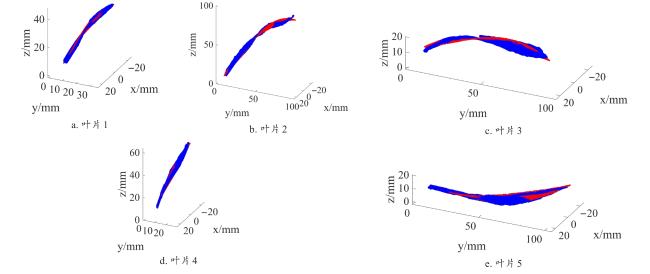
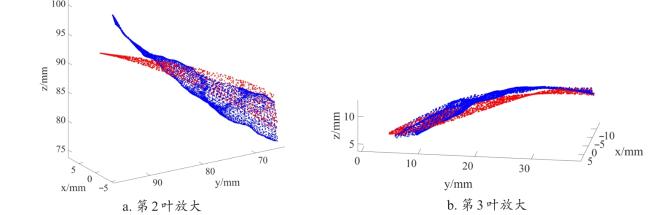
表1 小麦叶片实测点云参数化重建中单叶片参数估计结果Table 1 Parameter estimation results of a single leaf for the parametric reconstruction of measured point clouds of wheat leaves |
| ID | H/mm | W/mm | a | /rad | /rad | /rad | Chamfer/mm | |
|---|---|---|---|---|---|---|---|---|
| 1 | 61.46 | 4.72 | 0.416 6 | -0.017 1 | 0.469 4 | -3.031 4 | 1.298 0 | 0.370 |
| 2 | 133.20 | 7.58 | 0.420 9 | -0.008 1 | 0.524 0 | -4.853 2 | -0.722 4 | 0.998 |
| 3 | 85.54 | 7.37 | 0.431 0 | -0.004 4 | 1.141 7 | -3.494 8 | 0.955 2 | 0.734 |
| 4 | 69.48 | 3.65 | 0.452 7 | -0.018 1 | 0.369 3 | -2.349 5 | 0.030 0 | 0.409 |
| 5 | 108.54 | 7.42 | 0.498 5 | 0.002 6 | 1.653 4 | -2.201 7 | -0.114 9 | 0.625 |
式中:PX和PY⊂ 3。
图12以第一片叶的参数估计过程为例给出重建的点云,最终几何结构细节上存在一定偏差,例如在靠近根部的初始叶宽,在一定程度上影响到了对叶形因子 的估计。其他方面,叶长、最大叶宽以及叶身都非常吻合。
对小麦在生长全过程中的所有叶片进行单叶片重建结果如图14所示,在所有1 049个叶片样本中,88.56%的样本Chamfer距离小于2 mm,平均Chamfer距离约为1.2 mm。

为了验证该参数估计方法在不同叶位上的有效性,将所有点云样本按出现顺序均匀分成三份,分别对应低、中、高三组叶位,评估每个分段的Chamfer距离,如表2所示,结果进一步表明,该方法整体效果良好。
表 2 小麦叶片实测点云参数化重建中不同叶位误差Table 2 Point cloud reconstruction error for leaves at different positions on parametric reconstruction wheat leaves |
| 叶位分段 | 平均值/mm | 标准差/mm | 数量 |
|---|---|---|---|
| 低 | 1.615 2 | 1.465 8 | 525 |
| 中 | 0.750 8 | 0.382 4 | 409 |
| 高 | 0.714 2 | 0.749 8 | 115 |
2.3 参数序列估计
本研究使用参数方程建立了小麦叶片的几何模型,基于实测小麦点云数据,对模型参数进行了回归估计,并考察了小麦第一片叶子伸出后20天里的几何形态变化。为方便对比所有参数的变化趋势,将分布范围相近的参数划分在同一组中呈现,各自单位以表1为准。
如图15所示,茎叶夹角 有明显的增加趋势,表明随着叶片的生长,叶片的倾角逐渐变小,可能是由于叶片在生长过程中,其内部结构逐渐变得柔软,同时随着叶片的伸长,重心逐渐下移,从而使得叶片在重力的作用下自然下垂;叶片长度 在初始阶段表现出较为明显的增长趋势,但随着时间的推移,叶片长度的增长逐渐趋于稳定,表明叶片在生长初期经历了快速的细胞分裂和扩展,但随着叶片达到其遗传决定的最终大小,生长速度逐渐减缓并趋于稳定,这种生长模式的转变与植物体内的激素调节、营养供应以及环境因素(如光照、温度和水分)的变化有关;叶片弯曲度 仅有微小的变大趋势,但由于采集到的点云序列比较短,没有能呈现更加明显的变化;叶片绕轴扭曲角 和偏移角 相对没有规律,很大程度上受到风的影响,存在比较大的不确定性。
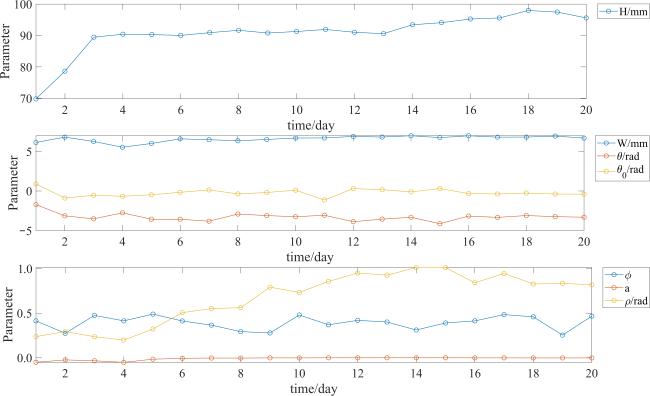
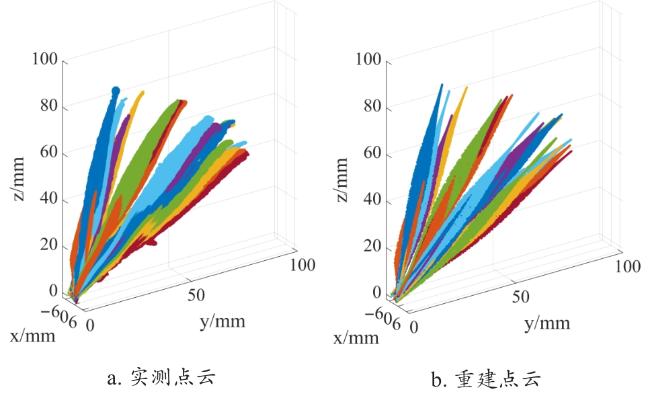
图16为小麦第一片叶20天实测点云与重建点云的对照。以上结果表明,该模型能够很好地描述小麦叶片的三维几何形状,且其参数在具有明确的物理、几何意义的基础上,易于在随时间变化的点云上做出较为准确的连续估计。
2.4 模型通用性验证

3 讨论与结论
本研究提出的曲面模型可以很好地表征叶片的三维形状,该模型实质上将小麦叶片的三维点云编码为7个意义明确的几何参数,通过这组参数可以与小麦的功能模型之间建立联系,有助于构建植物的功能-结构反馈模型。同时,相比其他植物结构模型,该模型与植物功能模型相结合将更有望应用于探究植物器官几何结构可塑性的研究。
与传统植物结构模型不同,该研究旨在结合基于先验知识的参数化建模技术与基于后验数据的点云拟合技术,以构建特定物种植物三维结构层面上的数字孪生模型。本研究实现了对单株小麦叶片外形结构的参数化,尽管该方法简化并忽略了叶片中的一些细节特征,但能通过极少的参数极大地还原叶片的几何外形。相比深度学习方法,该方法不仅简单、直接、有效,其得到的参数有更明确的几何意义,而且具有可编辑、可解释的特点。不同于传统做法中仅通过尺规等工具测量植物器官的个别特征参数,本研究采集了小麦叶片的精细点云,并进行了点云配准与分割标注,为后续研究提供了一定的数据基础。
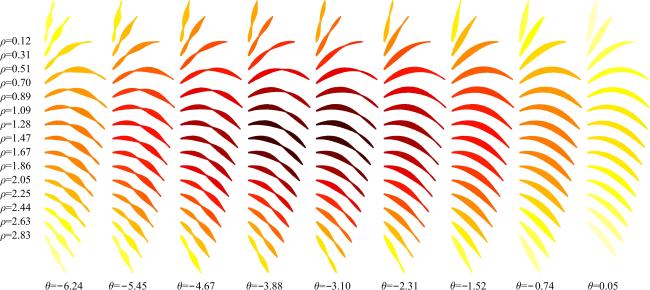
本研究以最大叶宽、叶长、叶形因子、茎叶夹角、弯曲度、绕轴扭曲角、绕轴扭曲偏移角7个参数构建小麦叶片参数化曲面模型,实现了对无标签小麦叶片点云的参数化重建。该模型可对小麦叶片进行有效的参数化重建,反演参数具备较高的可解释性,重建结果在1 049个实测点云上表现良好,平均偏差约1.2 mm,重建模型与点云之间具备互操作性,模型的参数可以灵活调整以生成形状相近的叶片簇。此研究结果对于小麦叶片的仿真分析及数字孪生等具有参考价值。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}