



0 引 言
基于机器视觉的河蟹质量估测方法通常遵循以下技术路径:首先通过图像分析获取甲壳形态学参数,继而构建甲壳参数与体质量的非线性回归模型实现质量估测。在甲壳形态参数-质量关系建模领域,唐永成等[7]通过生物学统计分析揭示了河蟹甲壳形态参数与体质量间具有显著相关性。和飞等[8]在此理论基础上建立了雌雄异型的甲壳长宽二项式回归模型,验证了形态参数法估测河蟹质量的理论可行性。在视觉测量技术层面,SUN等[9]采用YOLOv5-seg网络实现河蟹甲壳实例分割,通过模板匹配算法计算甲壳长宽尺寸,获得1.5%的平均绝对百分比误差。CHEN等[10]则设计了基于YOLOv8的关键点定位网络,在蟹壳图像中精准检测解剖参考点,结合背景标定实现尺寸自动测量,进一步验证了关键点检测法的工程适用性。然而需注意的是,上述研究均基于离水实验室静态环境构建,尚未解决水下原位检测的问题。
传统双目匹配算法(如Semi-Global Block Matching(SGBM)、Block Matching(BM))的核心原理是通过计算左右视图对应像素的相似性来估计视差,进而重建三维信息。其技术流程主要包括代价计算、代价聚合和视差优化3个阶段。传统双目匹配算法依赖图像中丰富的纹理特征(如边缘、角点)构建唯一的匹配对应关系。河蟹生活的底层沙质池底本就缺乏明显纹理特征,同时浑浊水体中的悬浮物(如泥沙、藻类)散射入射光,导致目标表面纹理模糊,边缘梯度下降[17]。研究表明,浊度每增加1 NTU,图像边缘清晰度降低约12%[18]。在低纹理区域,匹配代价分布平坦,无法通过聚合(如SGBM的路径代价累积)确定最优视差,导致视差估计在目标边缘处出现断裂,影响三维重建完整性[19]。再者,在静态场景中背景稳定,匹配误差可通过全局优化抑制,而在浑浊的水下环境中,大量悬浮颗粒在水中随机运动,在左右视图中引入时变噪声,破坏空间连续性约束[20]。动态噪声在代价体积中导致局部极值,全局优化算法因噪声干扰难以收敛,导致视差估计偏离真实值。
针对上述技术瓶颈,本研究提出系统性解决方案。首先,基于YOLOv11架构整合MBConv模块与EffectiveSE注意力机制,重构C3K2特征提取模块以提升模型表征能力,同时引入空间动态特征融合机制表面细节融合模块(Surface Detail Fusion Module, SDFM),增强模型的关键点检测效果。其次,建立特征点双目匹配算法替代传统三维重建流程。最后,构建双层反向传播(Back Propagation, BP)神经网络模型,整合甲壳长宽、性别等多源特征实现质量预测。研究中建立的整套河蟹原位质量预测方法,弥补了河蟹水下原位无接触测量的空白,减少了人力的消耗和对河蟹正常生长环境的干扰,能够持续地对水下河蟹质量进行监控,以期为河蟹的精细化养殖提供强有力的支撑,助力河蟹养殖向更加智能化阶段发展。
1 研究材料
1.1 研究对象与采集系统
本研究基于河蟹的生态习性与养殖实践,设计了1套可控环境下的数据采集方案。实验在1.5 m×1.5 m×1.0 m的水箱中进行,为模拟实际养殖场景,在箱底放入食台,并在食台上投放饲料,然后抽取河蟹养殖池中的池水并混入伊乐藻等,形成包含泥沙悬浮物、植物残片及饲料颗粒的拟真水下环境。图像采集系统采用MindVision MV-MGE134GC工业级双目相机模组,该设备分辨率像素为1 280×1 024,搭配3.37 mm焦距镜头,相机基线长度为12 cm。相机模组封装于定制化防水外壳,通过支架浸没于水下。相机采集到的图像通过以太网接口实时传输至工作站。
研究选取宜兴河蟹养殖基地的河蟹530只(雄性240只,雌性290只)作为样本,质量分布为2.45~229.30 g,头胸甲长度(L)15.95~74.70 mm、宽度(W)16.5~79.7 mm。
1.2 数据集构建
1.2.1 水下河蟹关键点检测数据集构建
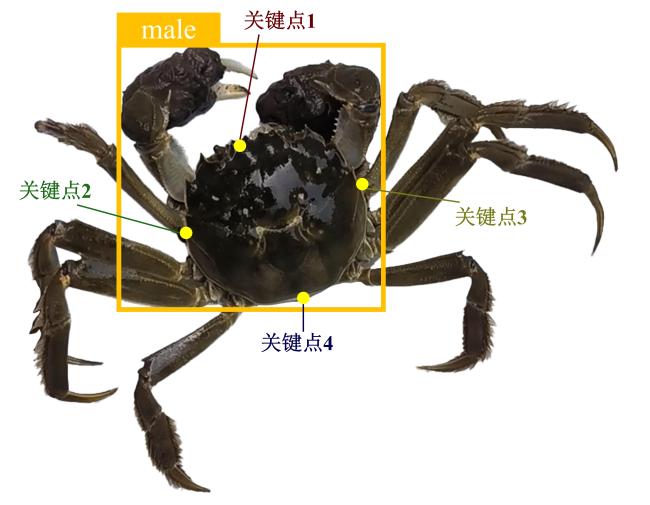
实验中使用感知哈希算法剔除相似度高于90%的重复图像,继而采用Laplacian梯度分析法排除运动模糊样本,最终保留3 200张有效图像构建YOLO-pose数据集。采用Labelme 5.5.0软件进行标注,建立双层次标注体系。在形态学层面,定义4个关键特征点:头胸甲前缘中央缺刻顶点(如图1中关键点1)、左右第4侧齿顶点(如图1中关键点2、关键点3),以及后缘中点(如图1中关键点4);在性别分类层面,构建最小外接矩形框标定甲壳和蟹钳区域,并根据原始记录信息进行性别二元分类(Male/Female)。标注数据经Python脚本转换为YOLO格式,并按8∶1∶1比例随机划分训练集(2 560张)、验证集(320张)与测试集(320张)。
1.2.2 河蟹生物计量复合数据集构建
为建立形态参数与质量之间的量化关系,本研究对530只河蟹进行了系统性生物测量。采用精度为0.01 mm的游标卡尺测量河蟹的背甲长和背甲宽,使用精度为0.01 g的电子天平称量河蟹的质量,并记录其性别。基于上述测量数据,构建了包含性别、形态尺寸和质量的复合数据集,并按照8∶1∶1的比例划分为训练集(424只)、验证集(53只)和测试集(53只)。
2 研究方法
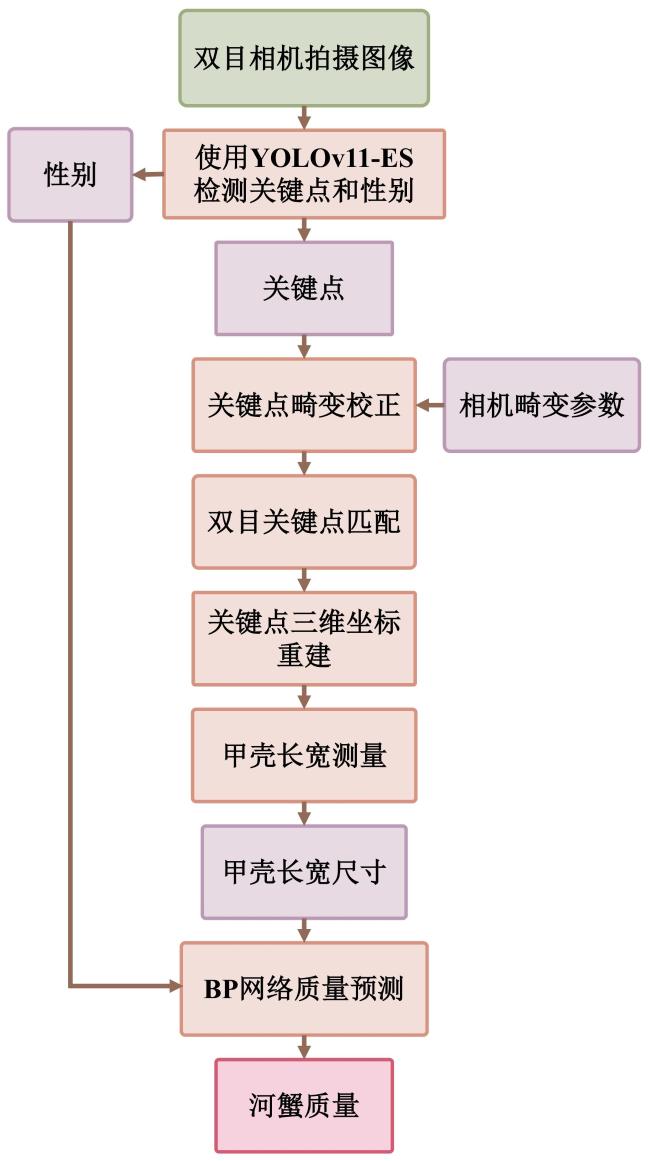
本研究建立了一个基于改进YOLOv11算法和三维重建技术的螃蟹质量估测方法,其技术路线主要包含以下3个环节。1)模型架构优化。通过在YOLOv11网络架构中引入Efficientnet中的MBConv与EffectiveSE模块重构C3K2基础单元,并设计SDFM特征融合机制,显著提升了水下复杂环境中目标检测的鲁棒性及关键点定位精度。2)基于河蟹关键点匹配双目立体视觉系统。将双目相机采集的左右视图分别输入改进后的YOLOv11网络进行推理,获取甲壳关键点坐标与性别分类信息,基于关键点分类和匹配机制建立特征点对应关系,结合相机标定参数通过三角测量原理实现关键点的三维坐标解算,进而构建甲壳形态的关键点三维点云模型并精确测量其空间维度参数。3)构建双层BP神经网络,输入上述测量的甲壳长宽和检测到的性别信息预测质量。水下河蟹质量估测的完整流程如图2所示。
2.1 河蟹目标识别及关键点检测算法改进
本研究选用YOLOv11[24]作为基础检测框架,YOLOv11采用C3k2模块优化特征提取过程,通过2×2小卷积核的密集部署,在降低22%参数量的同时增强局部特征捕获能力[25],在浑浊水下环境中,河蟹轮廓的边缘细节往往因悬浮颗粒和光散射而变得模糊,YOLOv11原生的C3K2结构可以在基础特征提取阶段对低对比度目标有较好的响应能力。然而,该模型在水下河蟹检测场景中仍存在显著局限:水下色偏削弱了颜色特征的有效性;悬浮颗粒物引发的泊松噪声使检测置信度大幅波动[26],误检率升高;同时,现有注意力机制对水草摆动引起的时序性遮挡缺乏动态建模能力[27]。针对这些挑战,本研究提出两个改进方向:一是使用MBConv和EffectiveSE注意力机制改进原有的C3K2模块,构建C3K2-EMBC模块;二是添加SDFM特征融合机制,增强网络在强干扰下的特征提取能力。
MBConv深度可分离卷积与EffectiveSE通道注意力机制对C3K2进行了重构,使得模型在减少噪声干扰、抑制水体折射光斑的同时,还能强化与关键点位置相关的特征通道响应。同时YOLOv11的路径聚合网络(Path Aggregation Network, PAN)+C3K2多尺度特征融合框架与SDFM特征融合机制契合:PAN结构负责跨层信息传递,而SDFM又在浅层细节与深层语义之间建立了自适应加权,二者相辅相成,在水下弱纹理、强噪声的情况下能更精准地聚焦甲壳边缘与关键点区域。
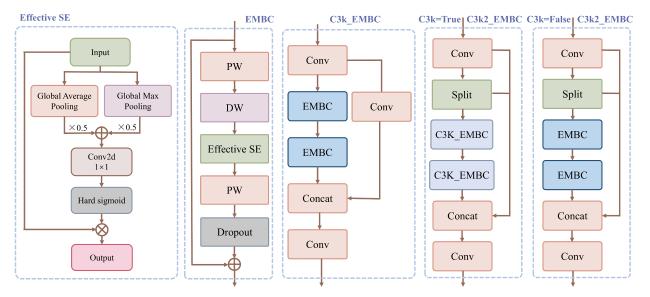
2.1.1 C3K2_EMBC模块改进
在真实河蟹养殖场景中,水下图像目标识别和关键点检测面临多重挑战。首先,河蟹养殖水体浊度高,叠加光衰减效应引发图像模糊和色彩失真;其次,传统卷积算子对高频噪声敏感,常规特征提取网络难以有效捕获甲壳缺刻等关键特征。针对上述问题,本研究引入EfficientNet的MBConv模块[28],其深度可分离卷积结构通过解耦空间与通道维度特征学习,其相较于标准卷积减少了网络参数量,在具有高噪声的真实图像中能有效减轻过拟合风险,增强网络对于输入噪声的鲁棒性。结合扩展率为4的逐点卷积层构建“扩展-压缩”特征流,通过通道维度的提升再压缩显著提升网络对低对比度目标的表征能力。针对水面波纹折射和水草遮挡引发的不均匀光斑问题,传统注意力机制存在定位偏差缺陷[29]。本研究融合EffectiveSE注意力机制[30],该机制通过自适应平均池化建立通道注意力权重,使网络能动态调节特征图通道响应强度。
2.1.2 SDFM融合机制
水下图像受光线散射、吸收及悬浮颗粒影响,常呈现低对比度、颜色偏差和细节模糊的问题。SDFM[32]通过双分支特征的自适应校准与注意力加权机制,可有效增强甲壳纹理、边缘等微观特征的显著表达[33]。具体而言,其Recalibrate子模块利用通道注意力对输入特征进行全局重要性重标定,抑制噪声通道并强化与关键点相关的特征响应。YOLOv11的Neck采用PAN结构聚合多尺度特征,但传统C3K2模块侧重于深层语义特征的提取,忽略了浅层细节的空间关联。SDFM引入局部空间注意力与全局通道注意力的协同机制,通过动态权重分配实现跨层特征的精细化融合。例如,在甲壳边缘检测中,局部注意力聚焦于形态学梯度变化区域,而全局注意力则维持整体结构的连续性,二者的乘积权重可平衡细节保留与语义一致性。水下环境中螃蟹常与水草、砂石等背景混杂,传统检测器易受相似纹理干扰。SDFM的特征校准阶段通过残差连接保留原始特征分布,避免梯度消失问题;后续的加权融合则通过软选择机制整合多源特征的优势。
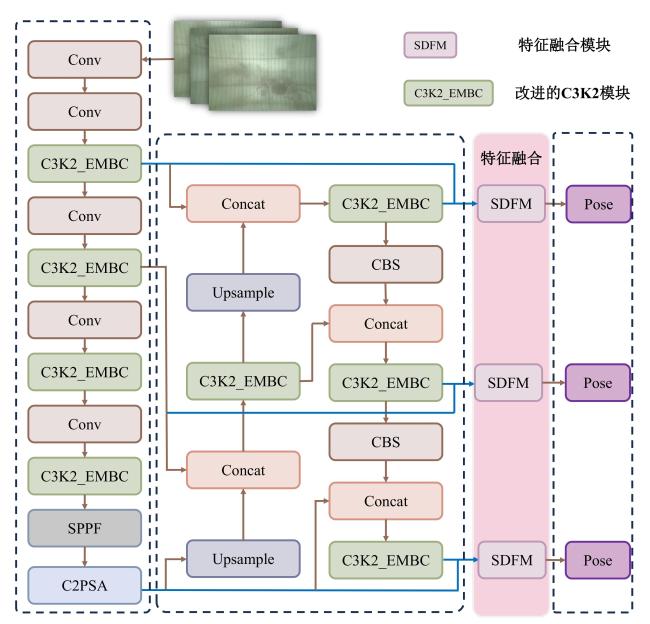
具体的网络结构中,当两个特征图输入SDFM模块时,首先沿通道维度拼接,并通过包含自适应平均池化和卷积的Recalibrate模块生成通道权重,对拼接特征进行自校正并添加残差连接;随后将校正后的特征拆分为两个新的特征图Fa和Fb,再通过通道聚合压缩为单通道特征,分别利用局部空间注意力和全局通道注意力计算权重,经Sigmoid激活后形成融合权重,最终以加权求和方式融合Fa和Fb,其中权重直接作用于Fa,Fb则通过互补权重(1-w)实现自适应特征融合。将SDFM融合机制添加到YOLOv11原模型中完整的YOLOv11-ES网络结构如图4。
2.2 背甲尺寸测量和质量预测
2.2.1 相机的标定和图像校正
针对实际双目视觉系统存在的非线性畸变效应及空间位姿偏差问题,在研究中采用基于“张正友标定法”的系统参数优化方案。使用规格为12×9方格(间距1 cm)的棋盘格作为标定靶,通过水下相机在距相机30~60 cm的水下采集50组立体图像对。利用MATLAB R2023b的Stereo Camera Calibrator工具解算系统参数,包括内参矩阵、外参矩阵和畸变系数。通过OpenCV的initUndistortRectifyMap函数生成像素级校正映射表,建立双目图像几何变换模型,有效消除光学畸变并实现立体像对行对准,为后续立体匹配建立精确的立体视觉模型,进一步使用校正映射表将检测到的关键点坐标进行变换。
2.2.2 双目图像特征点匹配
特征点的匹配是根据双目图像中识别到的同一只河蟹的解剖关键点位置,但由于实际拍摄的图像中同一张图中可能有多只螃蟹,同时由于两个相机的视场不同,因而在特征点匹配时需要采取一定的策略,避免图像的两个特征点误匹配。具体的匹配策略如下:
1)检测双目视觉的两侧图像是否都至少含有1个存在4个特征点的矩形框,且性别相同。如果成立就进入下一步,否则丢弃图片。
2)读取每个矩形框的纵坐标,并向外扩充5个像素,计算每个纵坐标的交集,若交集范围大于90%,那么将两个矩形框归为1个集合。
3)计算同一个集合中检测到两只螃蟹关键点1和关键点4所构成的向量夹角是否小于5º,且性别类型相同就判定为同一只螃蟹,进一步检测两个矩形框中是否同时含有4个关键点,若都含有4个关键点,即可完成关键点匹配。
2.2.3 河蟹甲壳测量
在研究中将关键点1和关键点4之间的实际距离定义为河蟹的甲壳长,关键点2和关键点3之间的实际距离定义为河蟹的甲壳宽。求解两关键点在空间中距离即可求出河蟹的甲壳长宽。双目测距的示意图如图5所示,关键点的空间距离确定主要包含以下步骤。
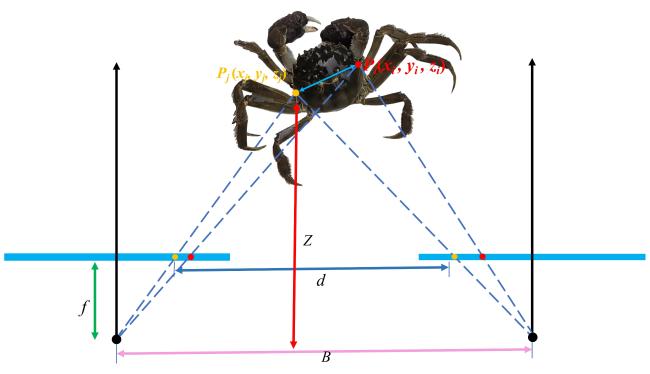
根据两幅图像中的视差求解深度信息,如公式(1) 所示。
式中: 为焦距,mm; 为基线长度,mm; 为视差,mm。
三维坐标计算:对于图像上一点 可得空间坐标 ,表示为公式(2) 。
式中: 为相机内参中的主点坐标; 和 分别为相机在像素坐标系沿水平方向和垂直方向上的等效焦距。
两个关键点 和 在空间中的距离如公式(3) 所示。
式中: 为空间中两点的实际距离,mm。
2.2.4 质量预测
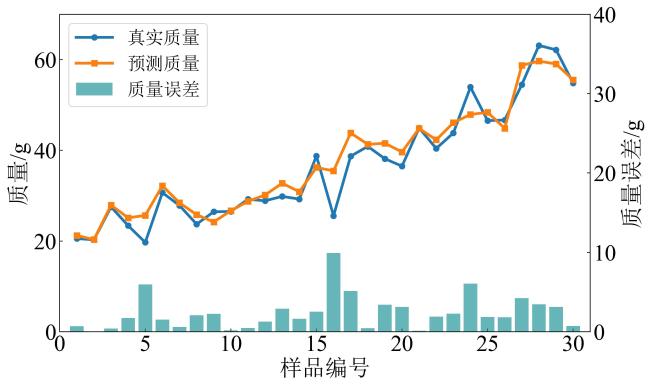
研究中搭建了包含192个神经元的两层BP神经网络来预测河蟹的质量,将河蟹的甲壳长宽和性别作为网络的输入,各层间使用ReLU激活函数,采用Huber损失函数平衡平均绝对误差(Mean Absolute Error, MAE)与均方误差(Mean Squared Error, MSE)的优势。为增强模型泛化能力,在网络中嵌入Dropout正则化,有效防止神经元协同适应。模型训练采用河蟹生物计量复合数据集中的数据。
2.3 参数设置和评价指标
本研究的实验在硬件配置上采用 Intel(R)Xeon(R)CPU E5-1620处理器、NVIDIA GeForce RTX 2080 Ti 显卡及64 GB内存,以确保高效的计算与数据处理能力;软件环境基于Windows 10操作系统,编程语言为Python 3.9.20,深度学习框架采用 PyTorch 1.12.1,并通过CUDA 12.6实现硬件加速。YOLO模型训练过程中,最大迭代次数(Epoch_max)设置为200,batch size设置为32,初始学习率设为 0.001。而在BP网络的训练过程中,Epoch_max和Batch size分别设为250和16,初始学习率则为0.000 1。
为全面评估系统性能,实验采用多维评价指标:目标检测任务通过精确率(P)、召回率(R)、交并比为0.5时的平均精度均值(Mean Average Precision 50, mAP50)及F 1分数(精确率与召回率的调和均值)衡量检测精度;关键点检测任务沿用相同指标,但聚焦于关键点定位精度。三维测距任务通过平均绝对误差和平均绝对百分比误差(Mean Absolute Percentage Error, MAPE)量化尺寸测量偏差,其中,MAE计算测量值与真实值的绝对误差均值;MAPE表征相对误差的百分比均值。
3 结果与分析
3.1 河蟹目标识别及关键点检测效果分析
3.1.1 消融实验
为了验证两种改进策略的有效性,在保证参数和运行环境一致的情况下,对比分析了不同改进方案的性能表现,实验结果如表1所示。
表1 改进YOLOv11模型河蟹关键点检测消融实验结果对比Table 1 Comparison of ablation experiment results for keypoint detection of Chinese mitten crab using the improved YOLOv11 model |
| 序号 | EMBC | SDFM | GFLOPS | BOX | Pose | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| P/% | R/% | mAP50/% | F 1/% | P/% | R/% | mAP50/% | F 1/% | ||||
| 1 | × | × | 6.6 | 85.3 | 84.7 | 92.8 | 85.0 | 85.8 | 85.1 | 93.1 | 85.4 |
| 2 | × | √ | 9.7 | 90.2 | 91.2 | 95.7 | 90.7 | 89.9 | 90.8 | 95.8 | 90.3 |
| 3 | √ | × | 6.4 | 89.8 | 93.2 | 95.1 | 91.5 | 89.1 | 92.3 | 94.4 | 90.7 |
| 4 | √ | √ | 9.5 | 91.7 | 94.7 | 97.2 | 93.2 | 91.3 | 94.4 | 96.7 | 92.8 |
|
消融实验结果验证了本研究改进方案的有效性。通过引入SDFM跨尺度特征融合机制,目标检测任务的性能指标得到显著提升:P、R、mAP50和F 1分数分别提高4.9、6.5、2.9和5.7个百分点。同步地,关键点检测任务对应指标也分别实现4.1、5.7、2.7和4.9个百分点的提升,证实了跨尺度特征融合在捕获复杂视觉模式方面的有效性,但伴随3.1 GFLOPs的计算量增加。
在模型轻量化改进方面,将C3K2模块重构为嵌入EffectiveSE的MBConv结构后,关键点检测的R和F 1分数分别提升7.2和5.3个百分点,同时模型计算量降低0.2 GFLOPs,这表明深度可分离卷积与通道注意力机制的协同设计能够有效平衡特征表达能力和计算效率。
值得注意的是,当两种改进策略联合应用时产生显著协同效应:目标检测任务中P、R、mAP50和F 1分数分别提升6.4、10.0、4.4和8.2个百分点;关键点检测指标同步提升5.5、9.3、3.6和7.4个百分点。实验数据表明,模块组合效果优于任意单一改进方案,最终为河蟹性别分类与甲壳关键点定位任务提供了精度与效率兼顾的解决方案。
3.1.2 对比实验
表2 不同模型在河蟹关键点检测实验中的结果对比Table 2 Comparison results from different models in Chinese mitten crab keypoint detection experiments |
| 模型 | GFLOPS | BOX | Pose | ||||||
|---|---|---|---|---|---|---|---|---|---|
| P/% | R/% | mAP50/% | F 1/% | P/% | R/% | mAP50/% | F 1/% | ||
| YOLOv5 | 7.3 | 83.2 | 87.5 | 92.4 | 85.3 | 88.3 | 82.2 | 92.3 | 85.1 |
| YOLOv8n | 8.3 | 89.3 | 85.4 | 93.7 | 87.3 | 89.3 | 85.4 | 93.7 | 87.3 |
| YOLOv10n | 8.0 | 81.4 | 83.4 | 86.0 | 82.4 | 81.4 | 83.4 | 86.2 | 82.4 |
| YOLOv11n | 6.6 | 85.3 | 84.7 | 92.8 | 85.0 | 85.8 | 85.1 | 93.1 | 85.4 |
| YOLOv12n | 6.6 | 79.4 | 86.0 | 88.7 | 82.6 | 80.7 | 86.5 | 89.1 | 83.5 |
| YOLOv8-ES | 9.7 | 90.6 | 87.7 | 95.4 | 89.1 | 90.3 | 87.3 | 94.9 | 88.8 |
| YOLOv11-ES | 9.5 | 91.7 | 94.7 | 97.2 | 93.2 | 91.3 | 94.4 | 96.7 | 92.8 |
在河蟹目标识别和关键点检测任务中,YOLOv11-ES在多项关键指标上显著优于其他主流轻量级模型。具体而言,其GFLOPS为9.5,虽略高于YOLOv8n(8.3)和YOLOv10n(8.0),但在检测性能上实现了全面突破:目标检测任务的P达到91.7%,R提升至94.7%,mAP50和F 1分数分别达到97.2%与93.2%,较原版YOLOv11n(P=85.3%,R=84.7%,mAP50=92.8%)提升显著。此外,YOLOv11-ES在关键点检测中同样表现优异(mAP50=96.7%),较YOLOv5(92.3%)和YOLOv8n(93.7%)分别提升4.4和3.0个百分点,证明了改进策略在多任务场景下的泛化能力。实验表明,通过结构优化与计算资源合理分配,YOLOv11-ES在可控复杂度下显著提升了综合性能。为了验证YOLOv11作为基底对改进策略的兼容优势,实验中将相同的MBConv+EffectiveSE与SDFM改进策略迁移到效果最好的YOLOv8骨干上,观察其在河蟹水下关键点检测与目标识别任务中的性能提升情况,通过对比YOLOv8-ES与YOLOv11-ES在相同数据集和评价指标下的表现,实验结果显示YOLOv11-ES在各项指标中均优于YOLOv8-ES,同时改进后的YOLOv8-ES在各项指标中又显著优于YOLOv8n,这充分证明了论文中提出的模块化改进方案的结构通用性和场景适应性。
3.2 河蟹甲壳测量精度分析
为验证本研究算法对河蟹甲壳尺寸的实际测量精度和鲁棒性,实验中额外测量30只河蟹,在1.1节中的环境中对每只河蟹采集不少于20组图像(涵盖河蟹在视野中的不同位置、多种姿态,以及强光和暗光的条件),并对应手动测量河蟹的甲壳长宽和质量,同时记录河蟹的性别,以此作为真实值。将每只河蟹的20组图像通过YOLOv11-ES网络同步预测关键点坐标及性别特征。然后依据2.2节建立的几何测量模型,对各图像进行甲壳长宽参数解析,并通过计算20组测量值的算术平均值消除由体位姿态、空间位置等偶然因素引起的测量偏差。采用配对样本对实测值与人工标注真值进行对比,预测的甲壳长度和宽度与真实值之间的差异如图7所示。
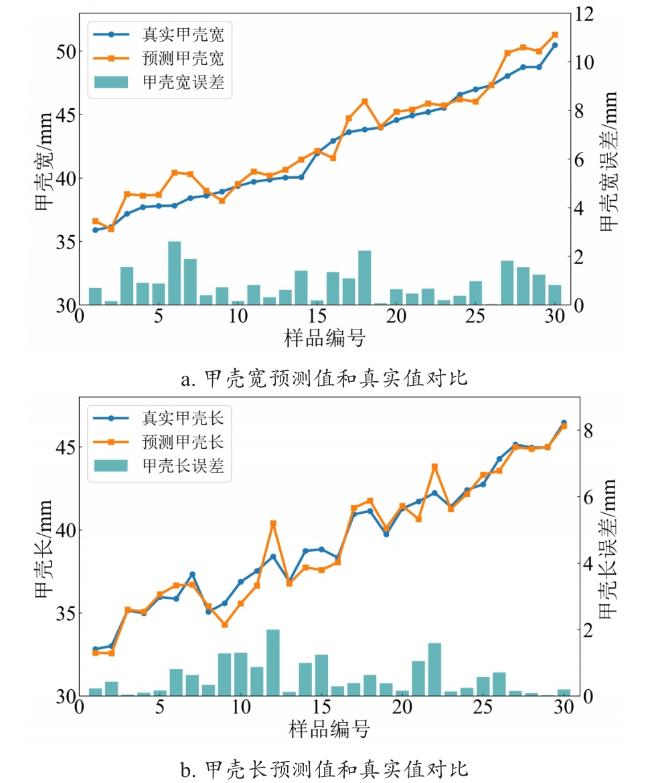
实验数据显示,甲壳宽度测量的MAE为0.893 mm,MAPE为2.68%;长度测量MAE为0.574 mm,MAPE为1.48%。回归分析表明,测量值与真实值呈显著线性相关(宽相关系数R =0.977,长相关系数R = 0.981)。该结果验证了本研究算法在水体环境下的测量稳定性和工程适用性。
在尺寸测量与三维重建过程中,水体浑浊度和光照强度等环境变量会直接影响相机成像质量,继而对测量精度产生系统性干扰。图像质量能够综合反映上述环境因素的变化,因此在实验中构建了图像质量指标与尺寸测量误差之间的定量关联分析。具体地,对30只河蟹分别拍摄了共计750张水下图像(每张图像中河蟹的数量范围为1~5只),并采用通用水下图像质量评价指标(Underwater Image Quality Measure, UIQM)对每幅图像的颜色失真、清晰度和对比度进行打分。所选图像的UIQM值分布在[1.0,2.5],将该区间等距划分为15个子区间(步长0.1),每个区间对应50张图像。
对于每个区间,计算每个河蟹样本甲壳长(Li )与宽(Wi )之和的测量值与人工标注真实值之间的相对误差,如公式(4) 所示。
式中: 为每个河蟹样本使用双目测距测得的甲壳长宽之和; 为人工手动测量的每个河蟹样本的甲壳长宽之和。
进一步计算50张图像中测得的所有河蟹样本误差的平均值,如公式(5) 所示。
式中:M为每个区间中河蟹样本的总数。
实验结果如图8所示,曲线清晰地揭示了平均相对误差随UIQM指标变化的趋势,为评估算法在不同成像条件下的环境鲁棒性提供了依据。
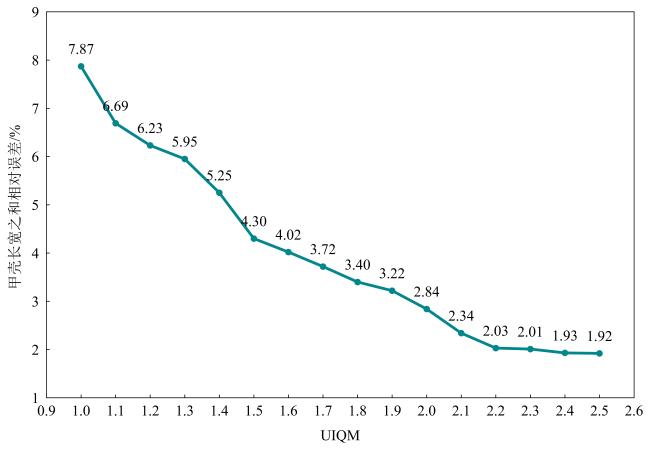
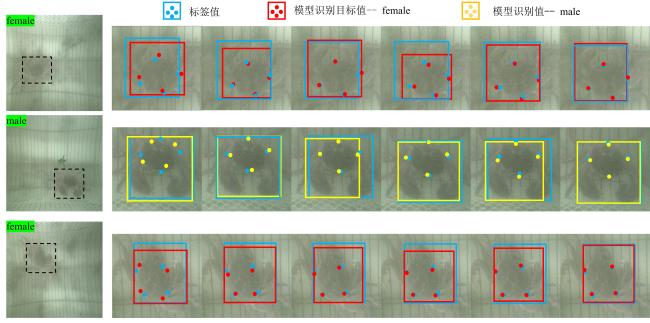
如图8所示,甲壳长宽之和的平均相对误差随着UIQM值的提升呈显著下降趋势。在低质量区间(UIQM≈1.0~1.4),图像因色彩失真和对比度低而导致关键点检测困难,平均测量误差最高可达7.87%。当UIQM进入中等范围(≈1.5~2.2)时,误差迅速下降至5%以内,表明即使是适度的清晰度和色彩保真度提高也能一定程度地增强测量精度。而当UIQM超过2.2后,曲线趋于平缓,误差进一步下降幅度收窄,最终在1.9%左右趋于稳定。这一现象说明,在确保关键特征可见性的前提下,图像质量的额外提升对几何测量精度的边际贡献有限,但在低质量条件下,环境因素仍是影响测量鲁棒性的主要瓶颈。值得注意的是,在图像中存在2只以上河蟹的情况中,关键点匹配准确率达99.3%,只有个别出现严重重叠的样本出现了误匹配问题,且由于误匹配后计算的三维距离远超过正常范围,因而可以通过设置正常的河蟹甲壳尺寸范围来剔除问题样本。
3.3 系统整体效果验证分析
4 讨论与结论
传统河蟹质量测量依赖人工捕捞与物理称重,存在效率低、易损伤蟹体的问题,而现有基于机器视觉的方法多局限于实验室静态环境或清澈水体,难以应对实际养殖场景中的复杂干扰。本研究建立的方法通过融合关键点检测、双目视觉与神经网络建模技术,实现了非接触式、高精度的水下原位质量估测,在浑浊水体环境下展现出显著的优势,为河蟹养殖的智能化监测提供了新的技术路径。
针对水下动态场景中目标检测与关键点定位的挑战,本研究对YOLOv11框架进行了系统性优化,通过轻量化重构C3K2_EMBC模块与SDFM实现显著性能提升。其中,MBConv模块采用深度可分离卷积解耦空间与通道维度的特征学习,在降低参数量的同时有效降低噪声干扰;EffectiveSE注意力机制则通过自适应通道权重分配动态增强关键点相关特征响应,显著提升几何精度。SDFM机制通过双分支特征自适应校准与跨尺度权重融合,弥补传统PAN结构在浅层细节与深层语义整合的不足:局部空间注意力聚焦甲壳边缘梯度变化区域,使水下场景中误检率大幅降低;全局通道注意力则通过动态调整通道权重可以很好地维持甲壳结构连续性。MBConv与SDFM的协同应用进一步构建“局部精细特征提取-全局语义一致性保持”的优化闭环,联合作用下目标检测与关键点定位的mAP50分别提升4.4与3.6个百分点,验证了噪声抑制能力与多尺度特征互补性对复杂水下场景的关键支撑作用。
关键点匹配策略与双目视觉的结合是本方法的核心要素。传统三维重建技术依赖全局图像特征匹配,在浑浊水体中易因特征缺失或误匹配导致测量误差增大。本研究通过关键点的稀疏匹配与性别分类约束,大幅降低计算复杂度的同时,将甲壳三维测量的平均相对误差控制在2.68%。尽管该方法在动态场景下对快速移动或姿态多变的河蟹仍存在偶然误差,但其在低可见度环境中的稳定性显著优于依赖高分辨率点云或完整轮廓提取的现有方案。质量预测模型通过双层BP神经网络整合甲壳形态参数与性别特征,实现了7.1%的平均相对误差。
综上所述,本研究提出了一种基于关键点检测与双目视觉的水下河蟹质量估测方法,通过改进YOLOv11目标检测框架、设计关键点双目匹配算法及构建BP神经网络预测模型,实现了高效、非侵入式的河蟹质量水下估测。实验表明,系统在关键点检测(mAP50 = 96.7%)、甲壳三维测量及质量预测中均达到养殖场景实用化要求。相较于传统方法,本研究的方案显著降低人工干预成本,减少蟹体应激损伤,为水产养殖智能化提供了可靠技术支撑。由于河蟹养殖实际环境及生长过程的复杂性,本研究中的养殖气象条件、水体环境条件、河蟹的品系、测试样本数量有限,难以覆盖所有实际情况。在未来的研究中,可以不断扩充各种场景下的数据,以及通过迁移学习等技术手段,不断提高模型的精度和泛化性能。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}