



0 引 言
从技术架构来看,农业多机器人全覆盖作业系统的稳定运行依赖于“感知识别-决策规划-控制执行”三大核心模块的闭环协同。感知识别模块作为系统的“眼睛”,通过多源传感器实时采集农田地形、作物信息与障碍物数据,为后续决策提供精准的信息输入;决策规划模块作为系统的“大脑”,需在复杂动态的农田环境中,完成机器人资源调度、覆盖路径规划与避障策略制定,既要确保全作业区域无冗余、无遗漏覆盖,又要兼顾机器人能耗与作业时间的最小化;控制执行模块作为系统的“手脚”,通过高精度运动控制算法实现机器人对路径的精准跟踪,保证作业稳定。三大模块协同交互,是实现农业多机器人高效、可靠全覆盖作业的关键前提。
当前多机器人全覆盖作业技术的研究已深入到农业生产的各个关键环节,并针对具体作业瓶颈提出诸多系统性解决方案[4]。例如,在植保环节,Xu等[5]提出一种地面机器人与植保无人机协同作业的路径规划方案,实现无人机集群对大规模分布式农田的精准喷洒作业。在收获环节,针对多台收割机与运粮车协同效率低下的难题,Wang等[6]提出一种联合调度方法,通过优化任务分配和作业序列,降低收割机的非工作等待时间,为大规模覆盖收获作业提供系统级的优化方案。Ahsan和Dankowicz[7]面向播种覆盖作业场景,设计播种车和补给车的双重调度策略,最大限度减少因播种机种子资源耗尽而导致的播种中断,提高播种作业效率。这些研究成果充分证明,多机器人全覆盖作业技术能够有效突破传统农业生产的局限,为农业提质增效提供切实可行的技术路径。
然而,农业生产环境非结构化的特点为多机器人全覆盖作业带来诸多挑战。一方面,农田环境具有高度动态性和不规律性,影响传感器的感知精度与机器人的路径执行稳定性。另一方面,不同农业作业环节的技术需求有差异,对系统的适应性提出考验。现有关于农业机器人围绕全覆盖作业技术的研究虽梳理了技术发展脉络,但存在两方面局限:一是多侧重于单一技术模块(如协同感知、任务分配、路径规划),未能从系统工程的闭环视角进行整体性分析;二是对不同作业环节(播种、植保、收获等)的技术差异与需求剖析不深,难以形成对多机器人全覆盖作业系统的系统性指导。因此,深入研究面向农业全覆盖作业场景的关键技术,对于推动智能农业和现代农业装备的发展具有重要意义。
在此背景下,本文围绕农业多机器人全覆盖作业的核心需求,提出一种“感知-决策-执行”一体化闭环框架,旨在为构建高效、可靠、智能的农业多机器人全覆盖作业系统提供理论支撑与技术参考,推动智能农业装备的产业化应用与农业生产的现代化转型。主要内容包括:(1)从闭环协同视角出发,深入分析环境感知、决策规划、控制执行三大模块的内在联系与协同机制;(2)聚焦农业场景的特殊性,梳理关键农业环节中多机器人全覆盖作业的技术研究进展;(3)结合研究成果,总结当前技术瓶颈,并展望未来发展方向。
1 农业多机器人全覆盖作业技术框架概述
农业多机器人全覆盖作业技术是要求多台机器人通过自主协作,在物理接触范围内完成对一个或多个作业区域的遍历和覆盖,这一技术的目标通常包括任务完成时间及路径代价最小化、作业重叠率低、覆盖率高等关键指标[8]。与单机器人相比,多机器人系统在作业效率、系统鲁棒性与可扩展性等方面展现出单体作业无法比拟的优势,在覆盖范围、作业效率、系统容错性等性能方面具有显著优势。
农业多机器人全覆盖作业系统的高效运行离不开多层次、模块化的关键技术架构支撑。整体来看,该架构主要由“感知识别”“决策规划”和“控制执行”三大核心模块组成,如图1所示。各模块之间既有相对独立的功能分工,又通过信息流和控制流等紧密耦合实现作业链条的无缝衔接,确保机器人集群能够在复杂动态的农业环境下完成大范围、高覆盖率的作业任务。
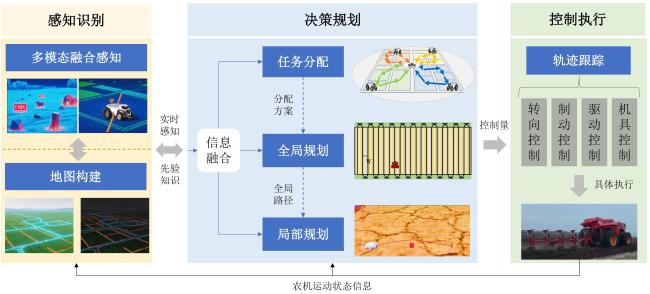
感知识别模块是多机器人系统的认知基础,其核心任务是为后续决策构建一个动态、全局且精细的环境模型,该模块主要融合三方面的技术内容。首先,多模态融合环境感知技术致力于解决单体智能的感知局限性,通过在单个机器人上集成视觉、激光雷达、深度估计等传感器,实现对局部环境信息的获取。其次,多机器人协同感知技术将感知能力从“个体”提升至“群体”,机器人通过网络共享各自的感知数据或结果,构建超越个体视野的全局一致性视图,有效克服遮挡和视角限制。最后,先验地图构建技术通过集成地块信息、路网信息,以及各类传感器数据,系统建立对作业区域的先验理解,为整个系统提供宏观的空间框架与语义信息。三者相互融合,输出农田场景地图、作物状态、机器人位姿和障碍物分布等多源信息,形成对作业环境的动态、全局、细致的认知,为决策规划模块提供数据支撑。
决策规划模块是多机器人全覆盖作业系统的认知核心,主要包括任务分配、全局规划和局部规划三个子模块,解决“谁做什么(Who-What)”“怎么去(How-to-Go)”和“如何安全到达(Safe-to-Go)”一系列层层递进的决策问题。任务分配(Task Allocation)作为资源优化器,基于全局任务需求和各机器人的状态和能力,生成最优的任务划分与指派方案,实现机器人资源的最优配置。全局路径规划(Global Path Planning)在任务分配的基础上,为每个机器人制定一条宏观的最优覆盖路径,以确保作业区域的完整遍历,同时最小化路径冗余和能源消耗。局部路径规划(Local Path Planning)能够基于实时感知数据,动态调整单台机器人的运动轨迹,实现对未预见障碍的规避和复杂地形的自适应导航。这种“任务-全局-局部”的层级化决策规划架构,是保证多机器人系统在动态、复杂农业环境下高效协作和作业连续性的关键。
控制执行模块是连接数字规划与物理世界的桥梁,核心职责是将决策规划模块输出的任务指令和路径信息转化为各类农业机器人精确、稳定的物理动作,其中轨迹跟踪控制(Trajectory Tracking Control)是核心内容。轨迹跟踪控制通过先进的控制算法,持续修正机器人的实际位姿,使其在面对车轮打滑、地形起伏等内外扰动时,仍能高精度地收敛于期望轨迹,引导农机沿预定路径运行,该模块的执行精度直接决定了播种、收获、植保等作业的最终质量。此外,控制执行模块需要将农机的实时运动状态信息反馈给上层感知识别和决策规划模块,形成闭环调控。
综上所述,农业多机器人全覆盖作业并非三大模块的简单堆砌,而是一个信息驱动的动态闭环系统。感知识别为系统提供决策所需的数据基础;决策规划基于此完成最优宏观策略与微观行为的决策;控制执行则将这些策略精准付诸物理实践,同时完成实时状态反馈,为上层感知识别和决策规划的动态调整提供依据。各模块之间的信息融合与反馈机制,使整个系统具备高度的智能化和自适应能力,促进了现代农业的智能化、自动化、规模化作业发展。
2 感知识别
感知识别是实现农业全覆盖自主作业的前提。农业环境具有非结构化特征,为满足多机器人在复杂农田环境中的作业需求,感知识别技术不仅需要能精确感知作物本体的生理状态,还需要准确解析环境的几何与语义信息,并支持多机器人之间的信息共享与协同。本章将围绕多模态融合环境感知技术、多机器人协同感知技术及先验地图构建技术三个方面,阐述其技术特点及在农业中的发展现状。
2.1 多模态融合环境感知技术
2.1.1 技术介绍
多模态融合环境感知技术能够弥补单一传感器在精度、检测范围、抗干扰能力等方面的不足,保证对农田环境、作物生长状态、障碍物分布等多源信息的全面感知。在农业多机器人作业过程中,常用的传感器模态包括RGB-D相机、多光谱相机、激光雷达(Light Laser Detection and Ranging, LiDAR)、超声波、惯性测量单元(Inertial Measurement Unit, IMU)、全球卫星导航系统(Global Navigation Satellite System, GNSS)等,不同传感器的特性如表1所示。根据融合层次的不同,多模态融合环境感知技术可分为数据级融合、特征级融合和决策级融合三种类型。数据级融合是在原始数据层面进行融合,保留了最多的原始信息,但对数据的时空一致性要求较高,且计算量大。特征级融合是先对各模态数据进行特征提取,然后融合这些特征,它在减少数据量的同时保留了关键信息,是目前研究的热点。决策级融合则是对各模态数据独立进行决策,然后综合决策结果,具有较高的容错性和灵活性,但信息损失较大。
表 1 农业环境感知常用传感器Table 1 Common sensors for agricultural environment sensing |
| 传感器类型 | 优点 | 缺点 | 感知距离/m | 典型农业场景 |
|---|---|---|---|---|
| RGB-D相机 | 提供彩色纹理图像、深度信息,适合目标识别;低成本易部署 | 强光/暗光下失效;雨雾穿透力差;计算复杂度高 | 0.1~5.0 | 果实采摘姿态引导、作物株高监测、育苗盘分拣 |
| 多光谱相机 | 能够识别作物生理状态;非接触式诊断 | 依赖光照条件;数据处理复杂;价格昂贵 | >0.5 | 病虫害早期预警、施肥差异图生成、产量预测 |
| LiDAR | 毫米级测距精度;强抗光照干扰;可进行三维点云重建 | 雨雪天气、高反射表面检测性能会下降;成本高 | 0.2~200.0 | 果园三维建图、地形坡度分析、避障识别 |
| 超声波雷达 | 成本低;抗粉尘/雾气干扰;简单易集成 | 易受温度影响;角度分辨率低;仅近距有效 | 0.02~5.00 | 农机底盘防撞、自主割草机边缘检测、料斗液位监测 |
| Radar | 全天气工作(雨/雾/尘);运动目标追踪能力 | 分辨率低(厘米级);金属干扰敏感 | 1~300 | 大型农机夜间导航、牲畜行为监控、土壤墒情估测 |
| IMU | 高响应频率(>100 Hz);不受外部环境干扰;短时精确定位 | 累积误差显著,需配合其他传感器 | — | 农机姿态防倾翻、崎岖地形运动补偿、播种机振动监测 |
| GNSS | 全局绝对定位;覆盖范围广 | 信号遮挡易失效,普通模块精度低(米级) | 全球覆盖 | 无人拖拉机路径跟踪、农田边界测绘、精准播种地理标定 |
|
2.1.2 技术发展现状
(1)基于数据级融合的方法。数据级融合直接在原始传感器数据层面进行跨模态关联,通过对初始数据进行融合计算、物理对齐(如时空配准、坐标变换),构建多传感器间的底层映射关系,为精细化农业感知提供底层数据支持。
该方法的关键挑战在于多源数据的时空同步和异构数据的一致性处理。当前基于标定板的联合标定方法可以将RGB相机与LiDAR的空间配准误差控制在厘米级[12, 13]。而在数据一致性方面,深度学习技术为前端数据级融合提供了新的解决方案,如Bender等[10]利用卷积神经网络(Convolutional Neural Network, CNN)对低分辨率多光谱图像进行超分重建,以匹配高分辨率RGB图像,这对于生成精细化的处方图至关重要。Cortinas等[14]利用生成对抗网络(Generative Adversarial Networks, GAN)实现不同模态数据之间的转换,从RGB图像生成伪LiDAR点云,该方案可以在缺少昂贵LiDAR的低成本机器人上使用,弥补传感器缺失的问题,增强识别的准确性。数据级融合保留了相对最丰富的信息细节,但计算成本高且对环境扰动敏感,适用于需最大化利用原始数据信息的精密感知场景。
(2)基于特征级隐式表征融合的方法。特征级融合在神经网络的中层抽象空间中实现多模态交互,通过深度学习等模型对各传感器的输出进行特征编码,在共享表征空间内进行特征拼接、加权、注意力交互。
农业机器人在路径作业时,需要实时分辨出作物/杂草、作业/非作业区域,而这些目标往往在视觉上高度相似或受到遮挡。特征级融合方法可以从图像、点云、光谱等数据中提取更深层特征,是提升农业全覆盖作业目标识别实时性、鲁棒性的主流技术。例如,针对精准除草这一典型的全覆盖作业,Deng等[15]将RGB图像的CNN特征(提供形状和纹理)与多光谱图像的CNN特征(提供光谱反射率差异)在通道维度上拼接,显著提升复杂背景下幼苗期杂草识别的精度。在果园选择性收获作业中,机器人需要在行进中实时定位并评估果实。Tsiakas等[16]分别从RGB图像和LiDAR点云中提取特征,然后通过注意力机制动态调整各模态特征的权重,使模型能同时关注果实的颜色纹理和空间位置,有效克服了枝叶遮挡问题。当前,跨模态注意力机制和图神经网络(Graph Neural Network, GNN)是特征级融合的研究热点,跨模态注意力机制能够自动学习不同模态特征之间的相关性,突出对当前任务重要的特征信息,抑制无关信息。Caltagirone等[17]通过使用全卷积神经网络(Fully Convolutional Neural Network, FCNN)对激光雷达和摄像机的数据进行特征融合,并采用三种融合策略组合数据,最终给出当前道路的可通行驾驶区域,可以保证机器人在覆盖作业中稳定、安全的自主导航。
与数据级融合相比,特征级融合可降低数据量,减少冗余信息,同时保留关键的判别性特征,在计算效率和融合性能之间可取得较好的平衡。
(3)基于决策级结果融合的方法。决策级融合以各模态的独立决策结果为输入,采用规则引擎或统计模型进行高层逻辑融合,允许传感器在时间和空间上的不完全同步,其关键在于如何设计有效的融合规则,将多个独立的决策结果进行整合,常用的融合规则包括投票法、贝叶斯推理、Dempster-Shafer (D-S)证据理论,以及模糊逻辑等。
农业全覆盖作业中,决策级融合的方式不仅可以提升机器人在复杂环境下的安全性,同时可以支撑多机器人协同中的联合决策。Lü等[18]提出一种基于毫米波雷达与摄像机信息融合的农田障碍物检测方法,结合毫米波雷达在距离与速度测量方面的优势及摄像机在类型识别与横向定位方面的优势,设计针对毫米波雷达与摄像机信息的决策级融合算法,并采用全局最近邻方法进行数据关联,提升了作业的安全性。Samal等[19]提出一种任务驱动的RGB-Lidar融合方法,用于资源受限场景下的目标跟踪,该方法根据视觉模块识别的感兴趣区域激活LiDAR,并根据系统运动状态降低LiDAR的基准帧率。Guan等[20]提出一种基于LiDAR和相机融合的实时车辆检测框架,该框架将LiDAR的稀疏深度图转换为稠密深度图,然后使用YOLOv3模型分别对彩色图像和稠密深度图进行目标检测,最后采用基于边界框融合和改进D-S证据理论合并两者的结果,获得最终的车辆位置和距离信息;将该方法迁移到农业场景下,可以有效提高覆盖作业中的检测精度和系统鲁棒性。
与数据级和特征级融合相比,决策级融合具有更高的灵活性和容错性,不需要对原始数据或特征进行严格的时空配准,各模态可以独立处理,当需要添加新的传感器或算法时,只需将其决策结果接入融合模块即可,无需修改现有的感知系统,降低了系统的复杂性。然而,决策级融合存在信息损失的问题,因为其只利用各模态的决策结果,而忽略原始数据和中间特征中包含的丰富信息。因此,在实际应用中,需要根据具体任务需求和系统约束,选择合适的融合层次和方法。
2.2 多机器人协同感知技术
2.2.1 技术介绍
在广域、非结构化的农业生产环境中,单体机器人的局限性日益凸显,其有限的感知范围、单一的固定视角,以及易受高大作物或设施遮挡等问题,已无法满足大范围、高效率的全覆盖作业需求。因此,机器人之间的协同感知技术扮演着不可或缺的角色。协同感知是指多个机器人通过通信网络,动态共享各自的传感器原始数据,提取的特征,乃至最终的感知结果,从而构建一个超越任何个体能力范围和精度的全局环境模型,并实现对动态目标的协同跟踪。这种协同模式不仅能通过并行或接力式的分区域建图极大提高作业效率,避免重复劳动,更能通过多视角信息互补,显著增强整个系统的鲁棒性。例如,当一个地面机器人因作物遮挡而丢失目标时,位于高处的无人机或其他位置的机器人可提供无遮挡的补充视角,确保任务的连续性。
2.2.2 技术发展现状
多机器人协同感知技术在农业领域的应用研究正不断深入,当前主要围绕两大核心路径展开:一是面向同构机器人集群的分布式协同建图与定位,实现广域环境的高效、快速建模;二是面向异构机器人系统的“空-地”一体化协同感知,融合不同平台的优势,实现感知、执行闭环。具体内容如下。
(1)分布式协同建图与定位方法。多机器人协同同步建图与定位技术(Simultaneous Localization and Mapping, SLAM)是提高大面积农田建图效率的关键技术,多个机器人可以分散在不同区域,各自构建局部环境地图,通过无线网络共享地图信息和自身位姿,利用后端优化算法识别不同地图间的重叠区域,将它们拼接成全局一致的农田地图[21]。
针对果园、大棚等农业场景下定位信号易受干扰或丢失的情况,研究者们提出了多种先进的分布式SLAM框架。Tian等[22]提出一个完全分布式的度量-语义SLAM系统。该系统允许机器人在通信带宽受限的情况下,实时构建全局一致的3D网格模型。其核心优势在于能够智能识别并拒绝因感知混淆(Perceptual Aliasing)导致的错误闭环,这一点对于在果园、玉米地等视觉特征高度重复的场景中保持地图的长期一致性具有重要意义。Lajoie和Beltrame[23]针对多机器人通信依赖问题,通过预算化的方法智能选择相对最有价值的闭环数据进行交换,极大减少了数据传输量,非常适合在网络覆盖不佳的偏远农场或大规模牧场中进行高效协同建图。Huang等[24]用轻量级的Scan Context描述符在机器人之间交换观测数据,对通信带宽要求较低。其采用的两阶段全局-局部图优化策略,能够在保证精度的同时,有效处理大规模机器人团队的协同建图任务,非常适用于多台农机协同作业的场景。
分布式协同建图与定位方法的核心在于解决大规模多机器人系统中的可扩展性、通信效率与建图鲁棒性三大挑战。无论是通过语义信息增强闭环的准确性,还是通过智能通信策略减少数据冗余,这些先进的SLAM框架都在推动多机器人系统从实验室走向广阔的农业应用场景。
(2)“空-地”一体化协同感知方法。“空-地”一体化协同感知是农业领域极具应用前景的异构机器人协同模式。它通过深度融合无人机(Unmanned Aerial Vehicle, UAV)的宏观广域视角与地面机器人(Unmanned Ground Vehicle, UGV)的高负载、强计算和精细作业能力,实现闭环群体智能效应。在这种模式下,UAV通常扮演“智能向导”的角色,而UGV则作为精准执行任务的“地面部队”[25]。
“空-地”一体化协同感知的本质在于利用不同平台间的能力互补与视角融合,将UAV的“宏观-广域”侦察能力与UGV的“微观-抵近”作业能力有机结合,形成高效闭环工作流程。这种模式不仅克服了单一平台在感知范围、作业精度或续航能力上的固有缺陷,更催生了全新的农业应用范式。
2.3 先验地图构建技术
2.3.1 技术介绍
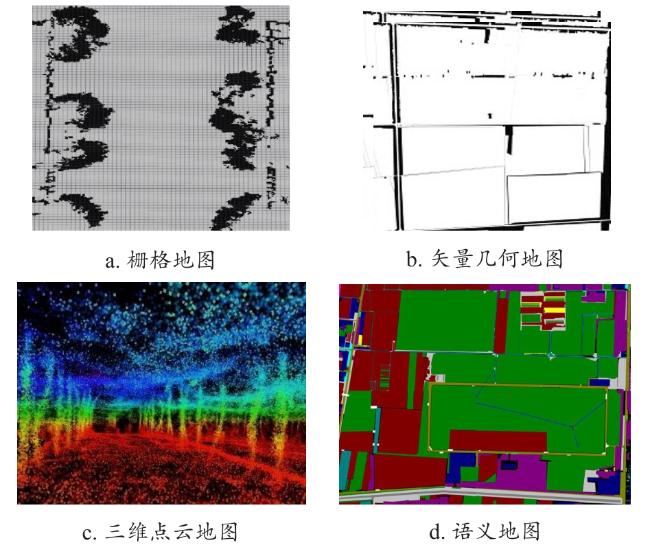
农田先验地图构建技术是农业机器人与智能农业系统的基础支撑技术之一,主要通过视觉/激光雷达、无人机、卫星遥感等手段采集农田环境信息,并将农田环境中的路网、障碍物、地块等关键地理要素转化为数字化、结构化的地图数据,为农业机器人的任务分配与全局路径规划提供空间信息基础[28]。当前根据地图的表示方式,农业机器人常用的地图类型包括栅格地图、矢量地图、三维点云地图与语义地图等,如图2所示。栅格地图通过将空间区域划分为规则网格单元,每个单元表示该区域是否可通行或存在特定特征,来实现对农田环境的数字化表达。矢量几何地图通过点、线、面等几何要素及其属性数据来描述农田空间特征。三维点云地图通过密集的三维坐标点集直接反映农田地形与植被的立体结构,尤其适用于果园、茶园等作物场景的建模。语义地图在几何地图的基础上增加环境的语义信息,将空间实体与语义标签关联,实现更高级的环境认知。
2.3.2 技术发展现状
针对农业场景大范围、多尺度、高动态的复杂特性,当前主流的地图构建技术已经形成覆盖“天-空-地”三个层级的立体化信息获取体系。该体系主要包括基于地面移动平台(如机器人)的近距离高精度测绘、基于无人机的中尺度精细遥感,以及基于卫星遥感的大尺度宏观观测,具体内容如下。
(1)视觉/激光雷达地面平台采集技术。地面平台是获取高精度农田地图数据的重要手段,主要通过车载或机器人搭载的视觉/LiDAR传感器,在行驶过程中采集周围环境的图像或三维点云等特征数据,同时结合IMU与轮速里程计进行位姿估计,通过相关算法生成全局一致的地图。Rovira-Más等[29]通过将立体摄像机、定位传感器和IMU捕捉到的信息结合起来创建三维地形图,所有设备都安装在移动平台上。核心的感知传感器为一台立体摄像机,可捕捉野外场景并生成三维点云,组合成全局野外地图。Zhou等[30]提出基于神经网络的SLAM/GNSS融合算法,在GNSS信号弱或缺失的果园环境中,通过激光雷达惯性里程计与GNSS数据的动态权重融合,将定位误差降低37%,显著提升了地图构建的精度与稳定性。Pierzchała等[31]提出一种graph-SLAM算法完成森林地图的构建,其中三维地图完全由激光扫描生成,并在闭环后通过鲁棒图优化对其进行改进,为林业机器人的应用与发展提供技术支持。Santos等[32]面向葡萄园作业场景,基于高级视觉特征设计了地图构建方法,并验证了在GNSS信号受阻/缺失的情况下该方法用于陡坡机器人的可靠性。
(2)无人机遥感采集技术与数据处理。无人机凭借其灵活性与高分辨率成像能力,已成为农田地图构建的主流平台之一[33]。无人机可搭载多光谱相机、高光谱传感器、LiDAR或热成像仪等多种载荷,通过设置合适的飞行高度、重叠率和传感器参数等,快速获取田块的精细数据。Fang等[34]提出基于无人机地标图像的农田信息获取方法,改进了基于标准系数模板匹配的障碍物边界提取方法,并评估了不同图像分辨率对障碍物提取精度的影响,实验结果显示边界点在X和Y方向上的平均偏差分别为0.87和0.95 cm,整个检测过程耗时约3.1 s。Zhang等[35]提出了一种基于无人机的新型农田边界提取和障碍物检测方法,其中特征点的提取结合了改进的加速稳健特征(Speeded Up Robust Features, SURF)算法和Harris算法,并通过结合基于网格搜索的K近邻算法(Grid-search K-Nearest Neighbors, Grid-KNN)等对特征点进行细化;实验中通过采集9个检验点进行误差检验,结果显示地物匹配误差为0.2 m。杜蒙蒙等[36]提出一种基于多旋翼无人机结合激光测距技术的农田地形测距方法,验证试验结果表明,所构建的无人机农田地形测绘系统获取的海拔高度与手持PPK-GPS(Post Processing Kinematic Global Position System)设备采集海拔高度的均方根误差为5.2 cm,该研究能够为促进精准平整地技术的大规模应用提供数据支持。
(3)卫星遥感技术的多尺度应用。卫星遥感技术为农田先验地图构建提供了大范围、周期性的数据支持,是全球尺度农业监测的核心手段,当前有诸多研究是基于卫星数据实现农田边界、障碍物等地块特征信息的获取。根据空间分辨率的不同,卫星遥感数据可分为低分辨率、中分辨率、高分辨率和超高分辨率,分别适用于不同尺度的地图构建需求,具体如表2所示。
表 2 不同空间分辨率卫星遥感及其应用Table 2 Satellite remote sensing of different spatial resolutions and their applications |
| 分类 | 分辨率大小/m | 特点 | 示例卫星 | 适用场景 |
|---|---|---|---|---|
| 低分辨率 | >20 | 覆盖范围广,但细节有限 | Landsat系列 | 气象观测、大范围环境监测 |
| 中分辨率 | >5,≤20 | 平衡覆盖范围与细节,适合区域级分析 | Sentinel-2 | 农业监测、土地利用分类、灾害评估 |
| 高分辨率 | >1,≤5 | 能识别较大的人造地物和自然特征 | 高分一号 | 城市规划、基础设施管理、精细化农业 |
| 超高分辨率 | ≤1 | 可清晰识别小型物体,适合最大细节的场合 | 高分二号, 吉林一号,WorldView系列,GeoEye | 精准测绘、国防安全、军事侦察、高精度资源调查 |
Di Tommaso等[37]结合全球生态系统动态调查数据(Global Ecosystem Dynamics Investigation, GEDI)与Sentinel-2卫星数据,构建了全球甘蔗种植区的10 m分辨率地图,覆盖13个主要产糖国,与实地数据、已有地图和政府官方统计数据的比较表明,该地图具有高精确度和高召回率,在像素层面的一致性超过了80%。Waldner等[38]设计了一种通用方法DECODE(Detect、Consolidate和Delinetate),利用基于空间、光谱和时间线索的深度学习方法,从卫星图像中自动提取准确的田地边界数据,并在澳大利亚谷物区进行了田块提取实验,该方法基于像素的提取精度为0.87,基于田块的提取精度可达0.88。Cai等[39]提出了一种双分支时空融合网络(Dual Branch Spatiotem Poral Fusion Network, DSTFNet)以提取各种地貌的农田地块,该方法整合了超高分辨率图像和中等分辨率卫星图像时间序列。结果表明,DSTFNet在划分农田地块方面表现良好,在湖北省的矢量化田块中,分割评价指数(Segmentation Evaluation Index, SEI)为0.191,在所有的对比实验中误差最低。Zhao等[40]开发了分层语义边界引导网络(Hierarchical Semantic Boundary-guided Network, HBGNet),充分利用边界语义来改进农业地块的划分;并针对中国缺乏大规模、高分辨率的农业地块基准数据集的问题,利用高分一号卫星数据,构建了第一个跨越七个不同地区的大规模超高分辨率农业地块数据集,覆盖面积超过10 000 km2。
3 决策规划
决策规划模块是农业多机器人全覆盖作业系统的“大脑”,负责解答“谁去做什么”(任务分配),以及“怎么去”(路径规划)的核心问题。该模块以感知识别模块提供的环境地图、作物状态和障碍物信息为输入,通过一系列优化算法,输出最优的机器人调度方案和行进路径,最终递交控制执行模块。本章将围绕该模块的三个关键技术环节展开:任务分配技术,用于实现机器人集群资源的最优配置;全局覆盖路径规划技术,用于制定无遗漏、无重复的宏观作业路径;局部路径规划技术,用于在动态环境中实时避障和调整轨迹。
3.1 多机器人任务分配技术
3.1.1 技术介绍
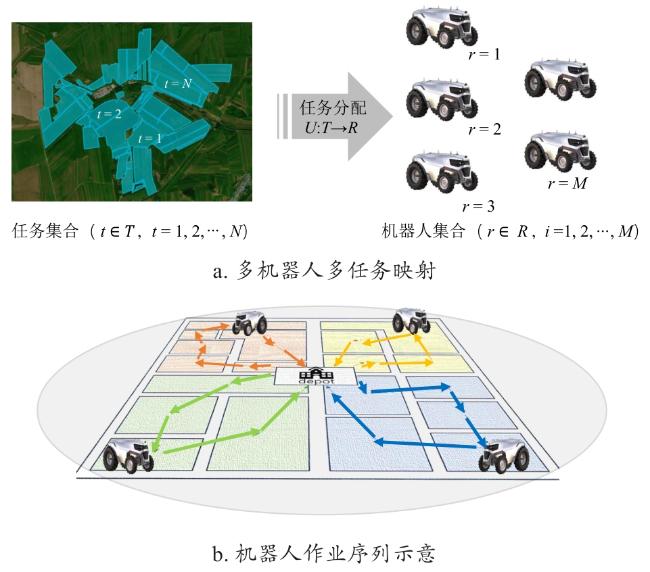
多机器人任务分配技术是将一组机器人R,最优的分配给一组任务T,使系统总体执行效率最优,如图3所示。任务分配是多机器人系统研究的核心问题之一,任务分配问题的研究已经从传统的静态建模逐步扩展到动态、复杂,以及高维约束的场景中。当前围绕任务分配已经出现很多经典问题,如动态车辆路径问题(Dynamic Vehicle Routing Problem, DVRP)、带负载的旅行商问题(Capacitated Traveling Salesman Problem, CTSP)、带时间窗口的旅行商问题(Traveling Salesman Problem with Time Windows, TSPTW)等经典模型,以及结合强化学习和分布式计算的创新模型[41-43]。这些研究为多机器人系统在农业、物流、灾害救援等领域的高效协作提供了理论支持和技术保障,同时为未来多机器人系统的智能化发展奠定了基础。
3.1.2 技术发展现状
近些年国内外学者围绕多机器人任务分配的研究提出了多种解决方案,主流解决方案主要包括确定性方法(Deterministic Methods)、启发式算法(Heuristic Methods)、基于市场的策略(Market-based Methods),以及基于学习的策略(Learning-based Methods)等,如表3所示。
表 3 农业多机器人任务分配技术对比分析Table 3 Comparative analysis of multi-robot task allocation technologies for agriculture |
| 分类 | 优化机制 | 典型方法 | 优势 | 局限性 | 计算复杂度 | 适用场景 | 相关文献 |
|---|---|---|---|---|---|---|---|
| 确定性方法 | 数学规划 | 动态规划, B&B,MILP | 保证解的最优性 | 计算复杂度高,难以扩展 | 高 | 小规模静态场景 | [44-46] |
| 基于市场的方法 | 分布式竞价 | CNP, HBCA | 动态响应快,分布式执行 | 通信开销大,可能局部最优 | 中等 | 中等规模动态场景 | [47-49] |
| 启发式方法 | 规则驱动 | GA, ACO, TS | 多目标优化,易于实现 | 解质量波动,参数敏感 | 中到高 | 中等规模动态场景 | [50-52] |
| 基于学习的方法 | 数据驱动 | DDQN, GNN, | 适应高维状态,自主学习 | 需大量训练数据,泛化性待验证 | 训练高,推理低 | 复杂不确定场景 | [53-55] |
(1)确定性方法。这种方法是通过建立精确任务分配数学模型进行优化求解,如动态规划法、分支定界法(Branch and Bound, B&B)、混合整数线性规划(Mixed-integer Linear Programming, MILP)等。D'Urso等[44]针对农业除草补给调度问题,基于动态规划的精确算法设计了适用于小规模问题的实例,基于分支定界方法的近似算法设计了适用于多台机器人的大规模问题实例。胡志文[45]采用整数规划的分支定界算法求解收割机调度模型,保障调度过程中农机油耗的最优化。Ferrer等[46]为了优化葡萄的采收作业,同时兼顾运营成本和葡萄质量,构造了一个混合整数线性规划模型,以支持采收机器人调度、劳动力分配和路线决策。这类方法在理论上可获得最优解,适合小规模、静态任务分配场景,具备理论可解释性,但在动态和大规模问题中需结合启发式或分层策略以提高效率。
(2)基于市场的策略。这种策略是通过类似拍卖机制的方式给机器人分配任务,强调机器人的自主协商与竞标。王猛等[47]利用增强的合同网络协议算法(Contract Net Protocol, CNP)来进行动态任务分配的研究,同时考虑了任务完成的时间成本。宫金良等[48]针对农业 Agent集群协同控制困难、工作效率低的问题,由改进的合同网算法进行机器人的任务分配工作。Liang等[49]则设计了基于启发式的聚类拍卖(Heuristic-Based Clustering Auction, HBCA)方法,通过将优先级-灵活性指数(Potential Field of Capability Influence, PFCI)引入拍卖机制,实现在不确定性场景下任务的高效分配。该类方法适合动态任务场景,但需优化拍卖规则,否则容易导致资源分配不均,导致部分机器人过载或闲置。
(3)启发式算法。这种算法是采用智能搜索策略快速获得近似最优解,广泛应用于多机器人调度和任务分配相关工作。常用算法包括遗传算法(Genetic Algorithm, GA)、蚁群算法(Ant Colony Optimization, ACO)、禁忌搜索算法(Tabu Search, TS)、人工蜂群算法(Artificial Bee Colony Algorithm, ABC)等。Lu等[50]通过构造路径代价最小、工作量均衡多个目标函数,采用优化的非支配遗传算法解决农业多机器人任务分配问题。Cao等[51]考虑了任务的动态变化及机器人的负载能力,通过改进蚁群算法实现多机器人的任务分配,并结合实际农田数据进行了实验。周龙港等[52]针对丘陵地区的农田环境下农业机器人遍历多个田块的遍历路径问题,提出了一种 Floyd算法与改进遗传算法相结合的遍历路径规划方法。Edwards等[56]考虑农田自身状态,利用改进禁忌搜索算法创建机器人工作计划,在多块田地上执行多个连续作业。Wang等[6]在收割-运输作业场景中,围绕收割机和运粮车的协同调度,提出最近邻接启发式算法(Nearest-Neighbor Heuristic, NNH),与ACO方法相比,该方法可大大降低整体操作时间,平均缩短了29.8 min。启发式算法比较适合多目标的需求,可以自主搜索最优解,经过多次迭代后能够得到比较理想的结果,但对参数设置敏感,性能依赖于算法参数的精细调整,在任务数量发生变化时解的质量会存在波动,陷入局部最优。
(4)基于学习的方法。这种方法利用数据驱动的方式让机器人自主优化决策策略,完成任务分配。随着强化学习和神经网络发展,越来越多基于学习的方法被用来解决多机器人动态任务分配相关问题。例如,Lu等[53]结合图神经网络与强化学习,将农田地块构建为带负载的图节点,并通过注意力机制策略网络完成机器人的任务分配,该算法在任务动态变化时可以保证解的质量稳定,同时模型的应用实时性高,能够满足实际应用需求。Din[54]基于双深度Q网络(Double Deep Q-Network, DDQN)探索多机器人巡逻过程的任务分配问题。Jiang等[55]结合免疫算法的抗体多样性和全局搜索能力,优化了农业资源分配和机器人路径问题,在农业机器人动态任务分配中表现出良好的效果。另外,Liang等[57]将强化学习与GNN结合解决最小最大多旅行商问题(Minmax Multi Traveling Salesman Problem, MinMax-MTSP),在实验过程中显示,该策略要优于整数线性规划和启发式算法给出的结果,尤其是在大规模任务场景下,这也为动态任务分配提供了新思路。基于学习的方法近些年结合传统的旅行商及其变种问题,被广泛地应用到了任务分配方面的研究,在农业领域需要设计特有的网络结构和目标函数,同时结合大量的实际农业数据作为训练样本,才能保证能够适应实际场景的任务分配需求。
3.2 全局覆盖路径规划技术
3.2.1 技术介绍
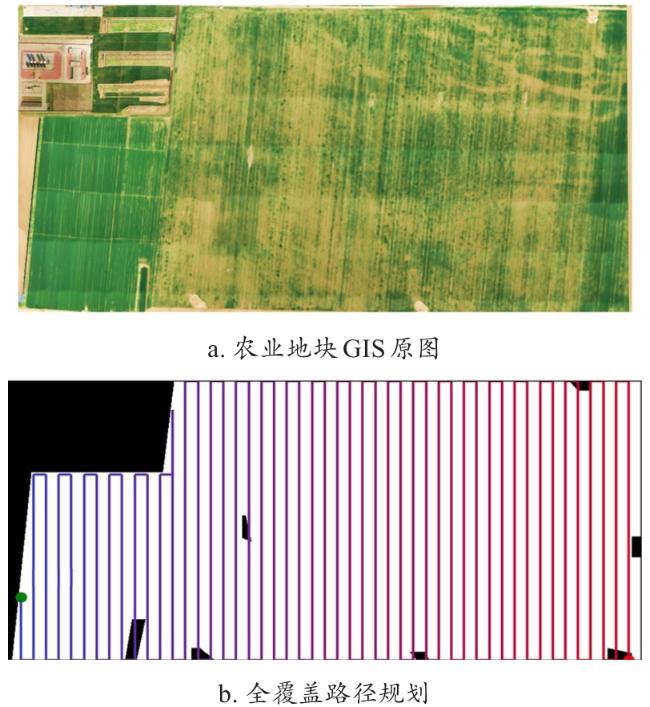
全覆盖路径规划(Coverage Path Planning, CPP)是机器人领域的重要研究方向,旨在设计高效路径使移动机器人能够完全覆盖目标区域,同时最小化重复率,如图4所示。在农业应用中,如农田喷洒、收割或植保作业,CPP的优化直接关系到作业效率、能源消耗。
3.2.2 技术发展现状
目前在农业领域围绕全局覆盖路径规划技术,已经发展出多条技术路线,主要包括四方面:基于几何分解的方法、基于网格的方法、基于全局的规划方法,以及基于学习的探索方法,如表4所示。以下详细讨论这些方法的优缺点,并结合相关论文进行阐述。
表 4 农业全局覆盖路径规划技术对比分析Table 4 Comparative analysis of global coverage path planning technologies for agriculture |
| 分类 | 优化机制 | 典型方法 | 优势 | 局限性 | 计算复杂度 | 适用场景 | 相关文献 |
|---|---|---|---|---|---|---|---|
| 几何分解方法 | 几何分割 | BD、MD、几何分解 | 适用于结构化环境 | 非凸环境下易过度分解 | 中等 | 结构化农田、简单障碍物场景 | [58-60] |
| 基于网格的方法 | 离散空间遍历 | STC、APF-CPP | 简化问题求解、工业级应用成熟 | 大尺度区域计算复杂度指数增长 | 随尺度指数增长 | 中等规模复杂地形 | [61-63] |
| 全局规划方法 | 连续路径生成 | Fields2Cover、MCFS、EE-CPP | 规划效率高、适合大规模场景 | 路径冗余 | 低 | 平方公里级农田、无密集障碍物区域 | [64-66] |
| 基于学习的方法 | 数据驱动策略 | DRL+TSP、RL-CPP | 适应动态环境、支持可变网格地图、处理非结构化场景 | 依赖网络模型的构建 | 训练高,推理低 | 非结构化场景、自主探索场景 | [67-69] |
(1)几何分解方法。这种方法是CPP的理论基础。早期研究如Boustrophedon Decomposition(BD)算法,Choset和Pignon[58]通过识别障碍物的顶点,将区域分割为多个规则的子区域,机器人可以在每个子区域内实现平行扫描路径覆盖。Acar等[59]提出Morse Decomposition(MD),该方法基于拓扑特性实现区域划分,通过识别区域内的关键点优化分割过程,在一定程度上减少了过度分割问题,能够更高效地适应复杂场景。Guastella等[60]提出基于无人机群的室外区域全覆盖路径规划系统,该系统考虑禁飞区,并基于MD方法将区域划分为更小的子区域,合理完成覆盖作业任务。另外,当前基于分解的方法通常会与TSP(Traveling Salesman Problem)问题结合,即在完成区域的划分后,考虑如何串联所有的区域,如Höffmann等[70]在经典几何分解的基础上,综合考虑机器人的路径优化和运动学约束(如转弯半径、速度限制等),实现更高效的覆盖路径规划。Kyaw等[71]在分解的算法基础上,通过递归来处理每个分解单元并生成覆盖路径,在四种不同的地图布局和不同的障碍物密度下,从路径长度、执行时间和重叠率方面与其他传统方法进行系统的对比实验,结果显示,所提出的方法在所有考量参数上均优于传统方案。几何分解方法适用于规则作业区域,可以在分割区域内利用扫描路径快速覆盖;但对不规则、复杂场景适应性差,存在过度分解问题,导致转向冗余较多。
(2)基于网格的方法。基于网格的方法是CPP中广泛应用且相对成熟的一类技术,其核心思想是将作业区域离散化为规则的网格单元(如正方形、六边形或其他规则形状),并通过规划机器人在这些网格单元上的遍历路径实现目标区域的全覆盖,是当前工业应用的主流方案。早期经典方法,如Gabriely和Rimon[61]提出了一种基于螺旋生成树覆盖(Spanning Tree Converage, STC),利用生成树的思想对离散化网格进行路径规划。这种方法通过将路径设计为往返式或平行扫描的形式,确保机器人能够高效地遍历所有网格单元,STC方法的优点在于其计算复杂度相对较低,适合规则区域的路径规划[62]。Kusnur和Likhachev[63]提出了基于网格的直接搜索方法,该方法不依赖传统几何分解,在离散化的网格上直接进行路径搜索,通过避免复杂的环境分解过程,简化了问题求解,提高了在线路径规划的效率。Wang等[72]基于人工势场法(Artificial Potential Field, APF)在原有基于网格的方法上增加了策略更新机制,使系统能够根据实时条件调整其覆盖路径规划策略,更好地处理死角,提高覆盖作业的鲁棒性。Tang和Ma[73]提出了一种基于局部搜索和工作量平衡策略的方法,以处理大规模复杂地形下多机器人覆盖任务的路径规划问题,减少因机器人任务不均衡导致的整体作业时间增加问题。基于网格的方法因其规则化、易实现和适应性强的特点,成为全覆盖路径规划中的重要技术路线;但随着作业区域规模的扩大和环境复杂性的增加,网格方法面临计算复杂度增加的问题。
(3)全局规划方法。此方法按照特定规则直接生成覆盖路径,如结合几何形状、费马螺旋环绕,在农业、清洁机器人、测绘等领域应用广泛。Mier等[64]发布针对农业作业的覆盖规划库Fields2Cover,可以基于地块的几何轮廓,通过平行线平移直接得到作业路径线,该方法支持不规则地块的路径生成,但当地块内存在随机障碍物时,路径会出现重复现象。Tang和Ma[65]提出以障碍物为中心的多机器人费马螺旋连接方法(Multi-Robot Connected Fermat Spiral, MCFS),在保持路径连续性的同时绕开障碍。Wu等[66]提出一种节能覆盖路径规划算法(Energy-Efficient Coverage Path Planning, EE-CPP),将费马螺旋扩展至三维地形(如丘陵农田),通过引入高度场峰值点生成等高线路径,结合启发式规则,降低农机覆盖作业的能耗。基于全局的路径规划方法,规划效率较高,适用于平方公里级场景,在含障碍物的不规则地块中,算法可能生成不必要的回溯路径,导致作业时间增加。
(4)基于学习的方法。近年来,基于学习的方法因其在动态和非结构化环境中的强大适应性而受到广泛关注。这类方法通过数据驱动的方式,使机器人能够自主优化覆盖策略。Ianenko等[67]使用带卷积层的 Actor-Critic 架构从有限范围传感器观察中学习机器人的策略,提出一种基于强化学习的二维网格覆盖路径在线规划方法,该模型可以很好地推广到具有复杂几何形状和动态障碍物环境中。Lei等[68]构建了分层环境信息处理的新框架,在已得到先验卫星地图和车辆实时定位信息的基础上,通过深度强化学习(Deep Reinforcement Learning, DRL)完成全覆盖路径的规划。Krishna等[69]、Carvalho和Aguiar[74]结合强化学习(Reinforcement Learning, RL),优化可重构机器人的覆盖路径,以适应不同形状的覆盖区域。基于学习的方法对非结构化场景具有更好的适应性,但应用到全覆盖作业场景下的研究中,仍需解决数据需求、实时性和全局优化等关键问题。
3.3 局部路径规划技术
3.3.1 技术介绍
局部路径规划技术主要用于动态环境中机器人路径的实时调整,要求机器人在运动学约束下,结合感知信息(提供环境的必要信息)给出高效、安全的运动规划(即计算一系列可行的动作来连接当前和目标状态),尤其在面对不可预测障碍物时,能够确保任务执行的安全性和连续性,如图5所示。
3.3.2 技术发展现状
当前已有的解决方案包含基于模型的方法、基于学习的方法、基于模型的学习方法三大类,如表5所示,以下详细讨论这些方法的优缺点,并结合相关论文进行阐述。
表 5 农业机器人典型局部路径规划技术对比分析Table 5 Comparative analysis of typical local path planning techniques for agricultural robots |
| 分类 | 优化机制 | 典型方法 | 优势 | 局限性 | 适用场景 | 参考文献 |
|---|---|---|---|---|---|---|
| 基于模型的学习方法 | 综合以上两者的特点,保持可解释性和自适应性 | NN-MPC、 NEUPAN | 平衡模型精度与计算效率、减少对数据的依赖 | 需模型先验知识、训练复杂度较高 | 需实时控制的复杂系统 | [86-88] |
| 基于模型的方法 | 利用数学或统计公式表示物理、先验知识,实现路径规划 | 图搜索基础:A*、D*、EBS-A* | 全局最优路径 | 计算复杂度高 | 结构化环境 | [75-77] |
| 采样基础:RRT/RRT*、DWA | 高维空间适用 | 路径可能不光滑 | 高维空间 | [78-80] | ||
| 优化基础: MPC、TEB | 动态优化能力强 | 计算成本高 | 动态控制 | [81, 82] | ||
| 基于学习的方法 | 通过数据驱动学习策略,无需显式建模 | CADRL、LSTM-RL、SCRL、AMCARL | 适应动态环境、支持复杂决策 | 依赖训练数据分布、奖励函数设计困难、真实场景泛化性弱 | 动态密集场景、多机器人协作 | [83-85] |
(1)基于模型的方法。这种方法利用数学或统计公式表示基础物理、先验信息和领域知识来实现局部路径的规划,从而完成障碍物规避操作。基于模型的方法可以分为图搜索基础的方法(Graph Search-Based Techniques)、采样基础的方法(Sampling-Based Techniques)和优化基础的方法(Optimization-Based Techniques)。
图搜索基础的方法,将环境离散化为图结构(如栅格地图),通过搜索算法寻找最短运动路径,包括A*(A-star)[75]、D*(Dynamic A-Star)[76]、Voronoi[77]及其相应变体。如Wang等[89]提出EBS-A*(Expansion distance,Bidirectional search,and Smoothing A-star)算法,扩展A*算法,将膨胀距离、双向搜索和平滑引入路径规划过程,实验表明所提算法的路径规划效率提高了278%,关键节点数量减少了91.89%,直角转弯次数减少了100%。此类方法通常需要提前构建环境地图,在面对已知障碍物时可以完成绕障路径的规划,但面对动态随机障碍物适应性不足。
采样基础的方法是在连续构型空间中随机采样生成路径树,避免环境离散化。如快速扩展随机树(Rapidly-exploring Random Tree, RRT)和其改进版本RRT*(Rapidly-exploring Random Tree Star),通过采样策略在配置空间中探索路径,适合高维空间路径规划[78]。Gong等[79]提出了一种改进的机器人局部避障动态窗口方法(Dynamic Window Approach, DWA),引入自适应参数调整机制,解决由于参数固定而无法平衡安全性和速度的问题。陈若彤等[80]在局部通行优化上,应用改进DWA算法,解决动态障碍物引起的可通行性区域实时判别问题,保证机器人高效完成主动避障。此类方法在复杂环境可能无法在有限时间内找到路径,另外随机采样会导致农机转向频繁,增加能耗。
基于模型的方法路径最优性与避障可靠性上具有理论优势,但计算复杂度和环境适应性在动态农业场景的应用效果有待提升,另外在“感知-控制”链路的计算过程中易存在误差累积。
(2)基于学习的方法。该类方法主要从数据中提取特征,无需构建精确理论模型,主要范式是强化学习(Reinforcement Learning, RL)。RL的核心思想是通过与环境交互,根据累计奖励反馈优化策略网络,使得机器人能够在动态环境中做出最优决策,目前已经被广泛应用于局部路径规划任务,例如基于协作的深度强化学习(Collaborative Deep Reinforcement Learning, CADRL)[83]、基于长短时记忆网络的强化学习(Reinforcement Learning Based on Long-Short Term Memory Networks, LSTM-RL)[84]、社会协作强化学习(Social Collaborative Reinforcement Learning, SCRL)[85]和基于注意力机制的多机器人协作强化学习(Attention-Based Multi-Agent Collaborative Reinforcement Learning, AMCARL)[90]。Huang等[91]提出一种基于混合专家(Mixture of Experts, MoE)架构的机器人运动控制方法,实现单一神经网络策略在复杂地形不同运动模式下的高效运动控制。基于学习的算法在端到端路径规划中展现了一定优势,这些方法通过环境信息的判断直接映射到机器人的运动行为上,但训练数据分布对性能影响较大,奖励函数的设计在高密度场景中较为困难,在真实环境中往往表现不如仿真。另外,此类方法通常缺乏可解释性,难以用于需要高可靠性的关键任务。
(3)基于模型的学习方法。近年来一种新兴趋势是将模型基础方法与学习基础方法结合,称为基于模型的学习算法(Model-Based Learning)。其核心在于利用深度神经网络(Deep Neural Networks, DNN)等机器学习模型,融合传统理论模型或通过学习传统理论求解器的数据,来达到两个关键目标:一是直接近似原本需要精确建模的复杂系统模型,二是替代复杂度高的传统优化过程。这种结合,使算法既具备对高维和非线性问题的表征能力,同时又保留了基于模型方法的结构性和可解释性。例如,Salzmann等[86]提出NNMPC(Neural Networks Model Predictive Control)算法,利用神经网络代替传统MPC算法的模型预测和优化过程,使MPC能够实时应用于四旋翼等机器人平台上执行复杂运动。Wang等[87]将深度确定性策略梯度(Deep Deterministic Policy Gradient, DDPG)与DWA结合。DDPG用于学习和自适应调整DWA算法的关键控制参数,以提高机器人在复杂动态环境中自主避障的适应性。Han等[88]提出NeuPAN(Neural Proximal Alternating-Minimization Network)方法,具备可解释性的同时实现端到端的控制,其将优化算法PIBCD(Penalty Iterative Block Coordinate Descent)展开为一个DNN输入为激光雷达点云数据及机器人运动学特性,通过端到端训练好的策略模型,直接输出控制指令完成导航避障任务。
4 控制执行
控制执行是机器人全覆盖作业流程的最终环节,负责将规划层生成的抽象路径转化为机器人精准、稳定的物理动作,是决定作业质量的关键。农田地形复杂多变,环境自身存在坡度大、凹凸不平、土壤质地差异等特点,机器人在作业过程中还可能受到各种外部干扰,如风力、地面摩擦力变化等。为了实现高精度的作业效果,通常需要建立准确的机器人运动学和动力学模型。运动学模型是描述机器人位姿与速度之间的关系,常用的运动学模型包括差分驱动模型、Ackermann转向模型等,分别适用于不同类型的农业机器人;而动力学模型则考虑机器人的质量、惯性、驱动力、环境摩擦力等因素,描述力/力矩与加速度之间的关系。基于以上模型,轨迹跟踪技术正是保证农业作业精准性的核心。
4.1 轨迹跟踪技术
4.1.1 技术介绍
轨迹跟踪技术是指农业机器人在运动过程中,通过实时比较规划的理想轨迹与机器人的实际状态,并由控制器生成驱动指令以持续最小化跟踪误差,最终实现高精度作业[92]。在全覆盖作业中,期望轨迹是由全局路径规划模块生成,它决定机器人的作业路径和覆盖范围。而轨迹跟踪的精度则决定作业质量,机器人需要同步作业机具的状态,实现“机-具”一体化控制,降低作业误差,保证整体作业质量。
4.1.2 技术发展现状
表 6 农业机器人典型轨迹跟踪技术对比分析Table 6 Comparative analysis of typical trajectory tracking technologies for agricultural robots |
MPC因其能够处理系统约束和优化控制性能而成为农业机器人轨迹跟踪的研究热点。研究者们针对农业机器人的特性,对MPC算法进行了各种改进。Sun等[99]提出了一种具有切换跟踪误差的MPC路径跟踪控制器,可在正常和高速条件下减少横向跟踪偏差并保持车辆稳定性。He等[100]围绕水田农机作业场景构建相关线性模型、目标函数和约束函数,设计了基于农机姿态的MPC路径跟踪控制方法,该方法能有效抑制由农机相对位置和姿态变化引起的横向位置突变偏差,实验显示其直线路径跟踪的平均均方根误差为0.043 m,平均绝对误差为0.033 m,实验效果良好。王子杰等[101]构建了考虑驱动轮滑移的分层路径跟踪控制,上层应用优化的MPC控制器,下层以模糊控制和积分分离PID控制为主,提高了喷雾机在复杂作业环境中的稳定性和路径跟踪精度。
智能控制方法如模糊控制、神经网络控制、强化学习等在农业机器人轨迹跟踪中的应用也取得了显著进展。模糊控制能够处理模糊信息和不确定系统,通过设计模糊规则库实现对机器人的控制。严国军等[102]提出了基于转角前馈补偿的自适应模糊PID控制器,并根据驾驶员特性,建立模糊控制规则,该方法可有效解决大转向间隙造成的转向控制稳定性问题,减少智能农机轨迹跟踪时的调整时间,提高跟踪精度。王茂励等[103]将PID控制方法与模糊控制方法相结合形成模糊PID控制器,并在东方红拖拉机上进行了输出响应实验和转角实验。神经网络控制则具有强大的非线性拟合能力,能够通过学习逼近复杂的系统模型和控制律。Carlucho等[104]提出了一种基于深度强化学习方法的智能控制系统,用于移动机器人的自适应多PID控制器,该方法提供一种无模型、无监督的解决方案,能够补偿甚至适应不确定环境的变化。强化学习通过与环境的交互学习最优控制策略,适用于模型未知或高度非线性的系统。杨琰等[107]针对复杂路面条件下无人化农业作业车辆路径跟踪控制精度低、控制器参数整定困难的问题,设计了一种基于深度强化学习的路径跟踪控制算法,平均跟踪距离误差均保持在厘米级。
多机器人协同轨迹跟踪技术也是当前研究的一个重要方向。在大规模农田作业中,多个机器人协同工作可以提高作业效率。研究者们提出了各种协同控制策略,如基于行为的协同控制、基于通信的协同控制、基于分布式模型预测控制的协同控制等。Obradović等[105]提出一种基于强化学习的分散式领导者-追随者多机器人编队控制算法,该算法主要应用于小型教育机器人Sphero群,无需复杂的数学模型和非线性控制法则,多机器人系统就能实现并保持稳定的队形。为解决农业多车编队协同控制中通信延时的问题及其补偿策略,栾世杰等[106]提出一种基于MPC延时补偿器的农业多机编队行驶的轨迹跟踪方法,即使在较高的延时条件下,该方法仍然能够快速响应并逐渐稳定至零误差,避免了振荡现象。
尽管农业机器人轨迹跟踪技术取得了显著进展,但仍面临诸多挑战:在复杂动态农田环境下的鲁棒性和适应性问题,多机器人协同跟踪的通信延迟和同步问题,控制算法的计算复杂度与实时性平衡问题,以及低成本、高性能的执行器和传感器的开发等。未来,随着6G、人工智能、边缘计算等技术的发展,农业机器人轨迹跟踪技术将朝着更高精度、更强鲁棒性、更高效率、更智能协同的方向发展。
5 挑战与展望
5.1 面临的挑战
随着作业规模的扩展和任务数量的增加,系统的协调与管理变得更加复杂,农业多机器人全覆盖作业技术的应用与研究面临着越来越多的挑战,主要包括以下问题和难点。
(1)感知不确定性。农业环境复杂多变,光照条件随时间、天气、季节等因素剧烈变化,作物生长也具有随机性,不同植株的形态、大小、间距存在差异,且在生长过程中不断变化,导致目标物体的特征提取、识别准确率大幅下降。例如,在果园中,果实的颜色、形状和纹理在不同时期呈现出多样变化,使得作业机器人难以准确识别植株状态。同时,作业空间内存在大量遮挡情况,作物枝叶相互交错,导致机器人的传感器无法获取完整的环境信息,造成感知盲区,影响对作业目标和障碍物的准确判断。另外,多机器人协同感知时,不同设备的采样频率、安装位姿差异,以及颠簸引发的位姿偏移,会造成跨机器人数据时空对齐偏差。当前的感知算法和传感器技术在应对这些复杂多变的农业环境因素时,仍存在精度不足、鲁棒性差等问题,难以满足高精度作业要求。
(2)任务需求动态变化。在实际生产中,农业作业任务具有显著的动态变化特性,可能因需求变动、气候变化、机器人故障等因素,作业任务会频繁新增、调整或取消。例如突发恶劣天气可能要求提前完成部分抢收任务,同时取消一些受天气影响较大的作业;部分机器人可能因机械故障、能源耗尽等原因临时退出作业。这种任务需求的高度动态性,对任务分配算法提出了极高要求。传统任务分配算法在面对大规模任务数量且频繁变化时,往往存在时间复杂度剧增的问题,难以在短时间内完成任务重分配,无法满足农业作业的实时性需求;同时,算法解的质量波动大、鲁棒性差,难以应对任务变化带来的冲击,导致分配方案的最优性下降,严重影响多机器人系统的整体作业效率和资源利用率。如何设计一种高效、实时且鲁棒的动态任务分配算法,在任务数量大、变化频繁的情况下,快速调整任务分配方案,确保整体作业效率和分配方案的质量不下降,是亟待解决的核心问题。
(3)作业空间尺度大且具有不规则性。农业作业区域通常呈现出大面积、不规则的特点,且地块中随机分布着各类障碍物,如田埂、树木,以及临时堆放的农机、物资等,同时还存在复杂环境特征,如不同地形地貌(水蚀沟、山地丘陵等)、作物生长形态差异等。在这种场景下,全局覆盖路径规划不仅需要确保全覆盖作业的高效性,避免路径冗余和重复覆盖以节省作业时间和能源,还需要考虑障碍物的分布特性,确保机器人能够安全、顺畅地通行。然而,农业场景中作业空间的不规则性和障碍物分布的不确定性,使得路径规划的复杂度呈指数级增长。现有算法在处理此类复杂场景时,存在路径时间复杂度高、路径代价大、计算效率低等问题。因此,如何在农业大规模随机障碍物环境下高效地规划覆盖路径,同时保证算法的实时性与可扩展性,是全覆盖路径规划技术面临的另一大问题。
(4)环境存在不可预知障碍物。在实际农业作业过程中,机器人可能遇到动态移动的障碍物或临时生成的阻挡物,例如,田间突然出现的野生动物、往来穿梭的农机设备,以及因雨水冲刷形成的临时沟壑等。这些动态障碍物的出现,导致预规划的路径无法执行,此时机器人需要具备快速感知环境变化并实时调整路径的能力,以确保任务的安全性和连续性。然而,动态环境中不可预测的障碍物分布、机器人运动学约束(如最小转弯半径、速度限制等),以及复杂作业场景的动态变化(水雾、粉尘等),导致局部路径规划响应时间长、路径存在不可执行性等问题,严重降低了作业的安全性和可靠性。如何提升机器人在动态环境下的快速感知和实时响应能力,确保局部路径规划的高效性和可行性,是保障农业多机器人稳定作业的关键难题。
(5)通信协同障碍。农业作业区域广阔,地形复杂,部分偏远地区或山区存在通信基础设施覆盖不足的情况,导致机器人之间、机器人与控制中心之间的通信信号不稳定、易中断,出现通信延迟、丢包等问题。例如,在大面积的农田或山区果园中,信号可能受到地形阻挡、建筑物遮挡,以及距离衰减的影响。此外,农业环境中的电磁干扰源众多,如农机设备的电机运转、高压电线等,会对通信信号造成干扰,降低通信质量。通信不畅严重影响机器人之间的信息共享和协同作业能力,使得任务分配、路径规划等协同操作无法及时、准确地执行。例如,当一个机器人发现新的作业任务或障碍物时,由于通信延迟,无法及时将信息传递给其他机器人,导致整体作业效率下降,甚至可能引发机器人之间的冲突和碰撞。如何构建稳定、高效的通信网络,克服农业环境中的通信难题,保障多机器人系统的协同作业顺畅进行,是该技术应用的重要挑战之一。
(6)能源与作业持久性。农业作业通常需要长时间、大面积的连续作业,对机器人的能源供应和续航能力提出了极高要求。目前,大多数农业机器人采用电池供电,电池能量密度有限,充电时间长,导致机器人的作业时间受限,无法满足长时间连续作业的需求。这不仅中断了作业流程,还增加了作业成本和时间成本。此外,在野外作业环境中,充电设施的部署和维护难度较大,进一步限制了机器人的能源补给。同时,机器人在作业过程中,由于需要克服复杂地形、应对不同作业任务的负载变化,能源消耗不稳定,难以准确预估续航里程,容易出现能源不足而导致作业中断的情况。研发高效、持久的能源供应系统,提高机器人的能源利用效率,以及优化能源管理策略,确保机器人在长时间作业中的能源稳定供应,是实现农业多机器人全覆盖作业的必要条件,但目前在这些方面仍面临诸多技术瓶颈。
5.2 未来展望
针对农业多机器人全覆盖作业技术所面临的挑战,未来的研究和应用需要在算法优化、系统集成等方面进行深入探索,以推动该领域的持续发展。以下是该技术未来的主要研究方向和发展展望。
(1)动态任务分配的智能化与高效化。随着农业作业任务的复杂性和动态变化性的增加,未来任务分配技术需要结合强化学习、图神经网络和深度学习等前沿人工智能技术,使系统能够实时适应任务变化并动态调整分配策略。同时,通过引入多目标优化机制,平衡任务完成效率、资源利用率和机器人间的工作负载,从而提升多机器人系统的整体作业性能,确保在任务频繁变动的情况下,仍能高效、稳定地运行。
(2)发展高效全覆盖路径规划技术。面对大规模、不规则农业场景,全覆盖路径规划技术需在计算效率和路径质量上实现双重提升。一方面,传统几何分解和网格方法可结合旅行商问题优化算法,通过合理划分作业区域、优化路径连接顺序,减少路径冗余和不必要的转向次数,降低路径规划的时间复杂度和空间复杂度;另一方面,发展基于深度强化学习的路径规划方法,通过自适应学习,优化动态环境下的路径生成。此外,分布式路径规划技术也将成为未来的研究重点,通过多机器人间的协同优化,共同完成全局路径规划,提升大规模作业场景下的全局规划效率。
(3)提升动态环境适应能力。面对动态移动障碍物和复杂不确定环境,未来的局部路径规划需要进一步提升机器人对环境变化的快速感知能力和实时响应能力。通过融合多传感器数据(如激光雷达、视觉传感器和惯性导航等),构建高精度环境建模与感知体系,使机器人能够精准识别动态障碍物的位置、速度和运动轨迹,并及时调整路径以规避碰撞。同时,端到端的方法是未来的主流解决方案,通过大量的实际场景数据训练,提高其泛化性,使其能够应对各种复杂多变的农业环境。在路径规划过程中,融合多目标优化,平衡路径规划的安全性、可行性和最优性,最大程度保证作业的连续性和覆盖率。
(4)软硬件协同与智能化系统集成。软硬件的深度融合与智能化集成是未来农业多机器人系统发展的重要趋势。在硬件方面,开发模块化设计的机器人系统,提高机器人的通用性、可扩展性和维护性;引入分布式计算和边缘计算技术,将部分计算任务从云端下沉到机器人本地或边缘节点,实现机器人间的低延迟信息共享和边缘侧任务协同处理,减少数据传输压力和通信延迟。在软件层面,结合先进的操作系统,优化机器人的任务调度、资源管理和系统控制;开发友好的人机交互界面,方便操作人员对多机器人系统进行监控、管理和任务下达,降低使用门槛,提升系统的易用性和应用拓展能力,促进农业多机器人系统在实际全覆盖作业生产中的广泛应用。
(5)能源技术创新与作业持久性保障。研发新型高效能源存储和转换技术,如高能量密度电池、氢燃料电池等,显著提升机器人的能源储备和续航能力,减少充电频次,实现长时间连续作业。同时,结合太阳能、风能等可再生能源技术,为机器人在野外作业提供补充能源,降低对传统能源的依赖,提高能源利用的可持续性。在能源管理方面,利用智能算法实时监测机器人的能源消耗情况,根据作业任务和环境变化动态调整机器人的工作模式和能耗策略,优化能源分配,确保机器人在整个作业过程中的能源高效利用和稳定供应,从而大幅提升农业多机器人的作业持久性和应用范围。
6 总 结
综上所述,多机器人全覆盖作业技术在农业领域的应用具有重要意义,文章首先阐述了农业多机器人全覆盖作业的总体架构,在此基础上,对现阶段复杂场景下感知识别、决策规划、控制执行已有方法进行了详细分类,并分析了不同分类方法的优缺点。但其研究和实现仍面临着诸多挑战,包括任务数量多且动态变化、作业区域大且环境复杂、动态障碍物的不可预测性等问题,显著增加了多机器人全覆盖作业的技术难度。未来,多机器人全覆盖作业技术将在端到端算法优化、动态感知与协作、系统集成等方面不断发展,与人工智能、物联网、边缘计算等先进技术深度结合,推动农业作业的智能化变革。通过提升农业作业的自动化、精准化和高效化水平,该类技术将为实现农业现代化和可持续发展发挥重要作用,为农业生产模式的变革提供新的解决思路和技术支持。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}