Smart Agriculture ›› 2025, Vol. 7 ›› Issue (5): 17-36.doi: 10.12133/j.smartag.SA202507040
• Special Issue--Opto-Intelligent Agricultural Innovation Technology and Application • Previous Articles Next Articles
LU Zaiwang1,2, ZHANG Yucheng1, MA Yike1( ), DAI Feng1, DONG Jie1, WANG Peng1, LU Huixian1, LI Tongbin1,2, ZHAO Kaibin1
), DAI Feng1, DONG Jie1, WANG Peng1, LU Huixian1, LI Tongbin1,2, ZHAO Kaibin1
Received:2025-07-29
Online:2025-09-30
Foundation items:Strategic Priority Research Program (Class A) of the Chinese Academy of Sciences(XDA28040000)
About author:LU Zaiwang, E-mail: luzaiwang21b@ict.ac.cn
corresponding author:
CLC Number:
LU Zaiwang, ZHANG Yucheng, MA Yike, DAI Feng, DONG Jie, WANG Peng, LU Huixian, LI Tongbin, ZHAO Kaibin. Progress and Prospects of Research on Key Technologies for Agricultural Multi-Robot Full Coverage Operations[J]. Smart Agriculture, 2025, 7(5): 17-36.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202507040
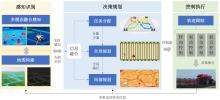
Fig. 1
Core technology module for multi-robot full-coverage operation
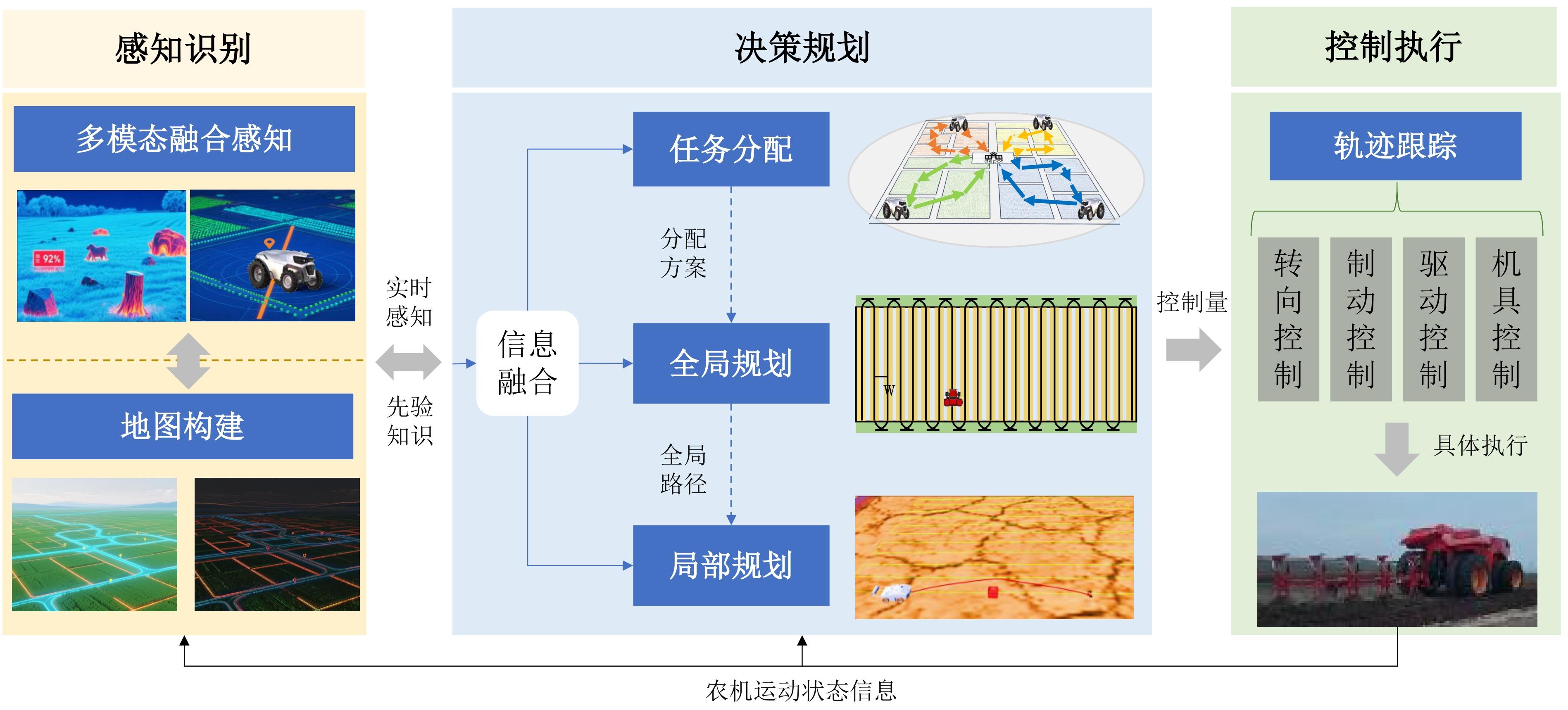
Table 1
Common sensors for agricultural environment sensing
| 传感器类型 | 优点 | 缺点 | 感知距离/m | 典型农业场景 |
|---|---|---|---|---|
| RGB-D相机 | 提供彩色纹理图像、深度信息,适合目标识别;低成本易部署 | 强光/暗光下失效;雨雾穿透力差;计算复杂度高 | 0.1~5.0 | 果实采摘姿态引导、作物株高监测、育苗盘分拣 |
| 多光谱相机 | 能够识别作物生理状态;非接触式诊断 | 依赖光照条件;数据处理复杂;价格昂贵 | >0.5 | 病虫害早期预警、施肥差异图生成、产量预测 |
| LiDAR | 毫米级测距精度;强抗光照干扰;可进行三维点云重建 | 雨雪天气、高反射表面检测性能会下降;成本高 | 0.2~200.0 | 果园三维建图、地形坡度分析、避障识别 |
| 超声波雷达 | 成本低;抗粉尘/雾气干扰;简单易集成 | 易受温度影响;角度分辨率低;仅近距有效 | 0.02~5.00 | 农机底盘防撞、自主割草机边缘检测、料斗液位监测 |
| Radar | 全天气工作(雨/雾/尘);运动目标追踪能力 | 分辨率低(厘米级);金属干扰敏感 | 1~300 | 大型农机夜间导航、牲畜行为监控、土壤墒情估测 |
| IMU | 高响应频率(>100 Hz);不受外部环境干扰;短时精确定位 | 累积误差显著,需配合其他传感器 | — | 农机姿态防倾翻、崎岖地形运动补偿、播种机振动监测 |
| GNSS | 全局绝对定位;覆盖范围广 | 信号遮挡易失效,普通模块精度低(米级) | 全球覆盖 | 无人拖拉机路径跟踪、农田边界测绘、精准播种地理标定 |
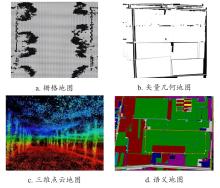
Fig. 2
Common forms of agricultural maps

Table 2
Satellite remote sensing of different spatial resolutions and their applications
| 分类 | 分辨率大小/m | 特点 | 示例卫星 | 适用场景 |
|---|---|---|---|---|
| 低分辨率 | >20 | 覆盖范围广,但细节有限 | Landsat系列 | 气象观测、大范围环境监测 |
| 中分辨率 | >5,≤20 | 平衡覆盖范围与细节,适合区域级分析 | Sentinel-2 | 农业监测、土地利用分类、灾害评估 |
| 高分辨率 | >1,≤5 | 能识别较大的人造地物和自然特征 | 高分一号 | 城市规划、基础设施管理、精细化农业 |
| 超高分辨率 | ≤1 | 可清晰识别小型物体,适合最大细节的场合 | 高分二号, 吉林一号,WorldView系列,GeoEye | 精准测绘、国防安全、军事侦察、高精度资源调查 |
Fig. 3
Schematic of multi-robot task allocation technology for agriculture
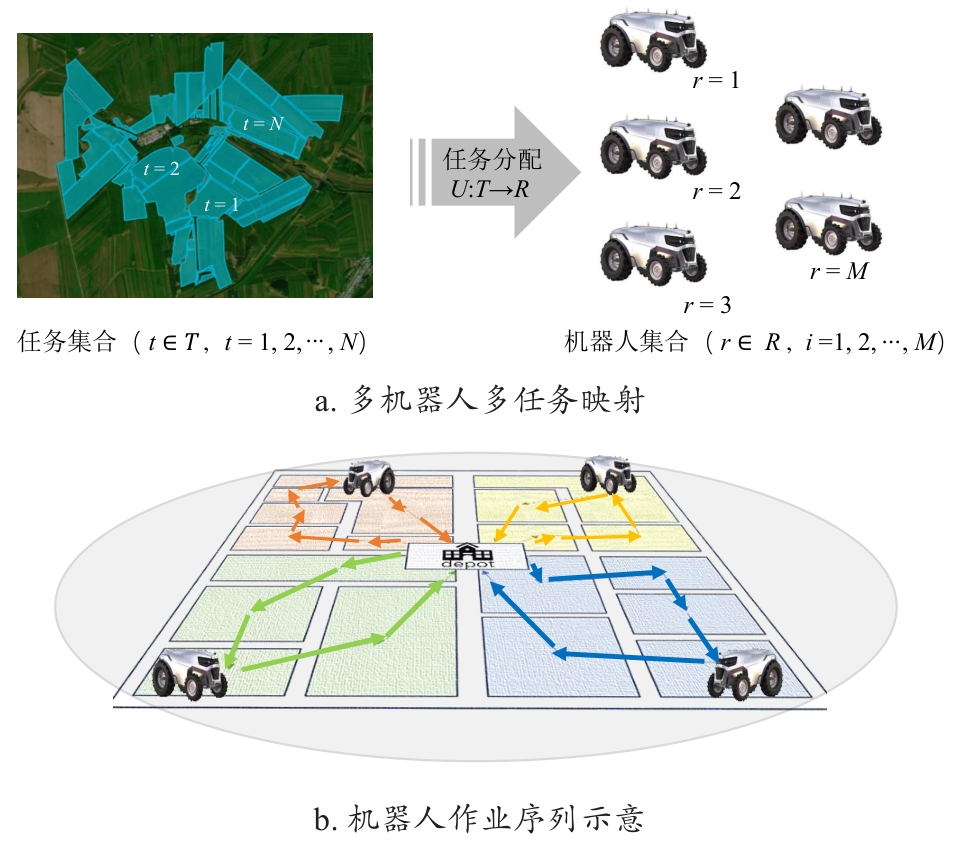
Table 3
Comparative analysis of multi-robot task allocation technologies for agriculture
| 分类 | 优化机制 | 典型方法 | 优势 | 局限性 | 计算复杂度 | 适用场景 | 相关文献 |
|---|---|---|---|---|---|---|---|
| 确定性方法 | 数学规划 | 动态规划, B&B,MILP | 保证解的最优性 | 计算复杂度高,难以扩展 | 高 | 小规模静态场景 | [ |
| 基于市场的方法 | 分布式竞价 | CNP, HBCA | 动态响应快,分布式执行 | 通信开销大,可能局部最优 | 中等 | 中等规模动态场景 | [ |
| 启发式方法 | 规则驱动 | GA, ACO, TS | 多目标优化,易于实现 | 解质量波动,参数敏感 | 中到高 | 中等规模动态场景 | [ |
| 基于学习的方法 | 数据驱动 | DDQN, GNN, | 适应高维状态,自主学习 | 需大量训练数据,泛化性待验证 | 训练高,推理低 | 复杂不确定场景 | [ |
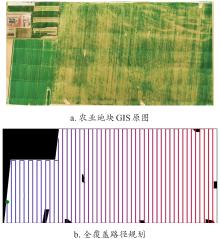
Fig. 4
Schematic of global coverage path planning technology for agriculture
Table 4
Comparative analysis of global coverage path planning technologies for agriculture
| 分类 | 优化机制 | 典型方法 | 优势 | 局限性 | 计算复杂度 | 适用场景 | 相关文献 |
|---|---|---|---|---|---|---|---|
| 几何分解方法 | 几何分割 | BD、MD、几何分解 | 适用于结构化环境 | 非凸环境下易过度分解 | 中等 | 结构化农田、简单障碍物场景 | [ |
| 基于网格的方法 | 离散空间遍历 | STC、APF-CPP | 简化问题求解、工业级应用成熟 | 大尺度区域计算复杂度指数增长 | 随尺度指数增长 | 中等规模复杂地形 | [ |
| 全局规划方法 | 连续路径生成 | Fields2Cover、MCFS、EE-CPP | 规划效率高、适合大规模场景 | 路径冗余 | 低 | 平方公里级农田、无密集障碍物区域 | [ |
| 基于学习的方法 | 数据驱动策略 | DRL+TSP、RL-CPP | 适应动态环境、支持可变网格地图、处理非结构化场景 | 依赖网络模型的构建 | 训练高,推理低 | 非结构化场景、自主探索场景 | [ |
Fig. 5
Schematic of local path planning technology for agricultural robots

Table 5
Comparative analysis of typical local path planning techniques for agricultural robots
| 分类 | 优化机制 | 典型方法 | 优势 | 局限性 | 适用场景 | 参考文献 |
|---|---|---|---|---|---|---|
| 基于模型的学习方法 | 综合以上两者的特点,保持可解释性和自适应性 | NN-MPC、 NEUPAN | 平衡模型精度与计算效率、减少对数据的依赖 | 需模型先验知识、训练复杂度较高 | 需实时控制的复杂系统 | [ |
| 基于模型的方法 | 利用数学或统计公式表示物理、先验知识,实现路径规划 | 图搜索基础:A*、D*、EBS-A* | 全局最优路径 | 计算复杂度高 | 结构化环境 | [ |
| 采样基础:RRT/RRT*、DWA | 高维空间适用 | 路径可能不光滑 | 高维空间 | [ | ||
| 优化基础: MPC、TEB | 动态优化能力强 | 计算成本高 | 动态控制 | [ | ||
| 基于学习的方法 | 通过数据驱动学习策略,无需显式建模 | CADRL、LSTM-RL、SCRL、AMCARL | 适应动态环境、支持复杂决策 | 依赖训练数据分布、奖励函数设计困难、真实场景泛化性弱 | 动态密集场景、多机器人协作 | [ |
Table 6
Comparative analysis of typical trajectory tracking technologies for agricultural robots
| 分类 | 优势 | 局限性 | 适用场景 | 参考文献 |
|---|---|---|---|---|
| PID | 结构简单,易于实现 | 复杂环境适应性差 | 平坦农田直线作业 | [ |
| LQR | 能耗优化,稳定性强 | 依赖精确模型,抗干扰弱 | 线性化路径跟踪 | [ |
| SMC | 强鲁棒性,抗参数扰动 | 存在抖振现象 | 复杂路面作业 | [ |
| MPC | 显式处理约束,优化性能 | 计算负担重 | 高速稳定作业 | [ |
| 智能控制 | 无模型自适应,环境适应性强 | 规则设计依赖经验,需大量训练数据 | 复杂非结构化农田 | [ |
| 协同控制 | 抗通信延迟,多机同步,自主保持队形 | 系统复杂度高,限于小型机器人集群 | 大规模多机编队,农机集群作业 | [ |
| [1] |
赵春江. 智慧农业发展现状及战略目标研究[J]. 智慧农业, 2019, 1(1): 1-7.
|
|
|
|
| [2] |
|
| [3] |
张津国, 蔡建峰, 姜蓉蓉, 等. 果园作业机器人自主导航多任务联合感知方法研究[J]. 智能化农业装备学报(中英文), 2025(2): 35-43.
|
|
|
|
| [4] |
钱震杰, 金诚谦, 刘政, 等. 无人农场中的智能控制技术应用现状与趋势[J]. 智能化农业装备学报(中英文), 2023(3): 1-13.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
SA I,
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
马楠, 曹姗姗, 白涛, 等. 农业复杂场景下多机器人协同SLAM研究进展与展望[J]. 智慧农业(中英文), 2024, 6(6): 23-43.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
郝肇铁, 郭斌, 赵凯星, 等. 从规则驱动到群智涌现: 多机器人空地协同研究综述[J]. 自动化学报, 2024, 50(10): 1877-1905.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
赵欣, 王万里, 董靓, 等. 面向无人驾驶农机的高精度农田地图构建[J]. 农业工程学报, 2022, 38(S1): 1-7.
|
|
|
|
| [34] |
|
| [35] |
|
| [36] |
杜蒙蒙, 刘颖超, 姬江涛, 等. 基于无人机与激光测距技术的农田地形测绘[J]. 农业工程学报, 2020, 36(22): 60-67.
|
|
|
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
王宁, 韩雨晓, 王雅萱, 等. 农业机器人全覆盖作业规划研究进展[J]. 农业机械学报, 2022, 53(S1): 1-19.
|
|
|
|
| [43] |
|
| [44] |
|
| [45] |
胡志文. 绿色收割农机调度模型[J]. 上海农业学报, 2014, 30(6): 133-135.
|
|
|
|
| [46] |
|
| [47] |
王猛, 赵博, 刘阳春, 等. 同种农机机群动态作业任务分配方法[J]. 农业工程学报, 2021, 37(9): 199-210.
|
|
|
|
| [48] |
宫金良, 王伟, 张彦斐, 等. 基于动态刺激响应模型的异质农业Agent群任务分配策略[J]. 农业机械学报, 2021, 52(5): 142-150.
|
|
|
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
周龙港, 刘婷, 卢劲竹. 基于Floyd和改进遗传算法的丘陵地区农田遍历路径规划[J]. 智慧农业(中英文), 2023, 5(4): 45-57.
|
|
|
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
陈若彤, 刘继芳, 张志勇, 等. 规模化牛场智能巡检路径规划算法[J/OL]. 智慧农业(中英文), 2025: 1-14. (2025-06-13)[2025-07-02].
|
|
|
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
刘文龙, 王晨旭, 徐伟东, 等. 基于预瞄模型的农机路径跟踪模糊PID控制方法[J]. 农业工程, 2024, 14(7): 31-36.
|
|
|
|
| [95] |
|
| [96] |
马悦琦, 迟瑞娟, 赵彦涛, 等. 基于模糊控制的插秧机LQR曲线路径跟踪控制器优化方法[J]. 农业机械学报, 2023, 54(S1): 1-8, 102.
|
|
|
|
| [97] |
|
| [98] |
葛志康, 白晓平, 王卓, 等. 基于动力学建模的农机路径跟踪鲁棒滑模控制算法研究[J]. 农机化研究, 2025, 47(8): 1-9.
|
|
|
|
| [99] |
|
| [100] |
|
| [101] |
王子杰, 刘国海, 张多, 等. 高地隙四轮独立驱动喷雾机路径跟踪模型预测控制[J]. 智慧农业(中英文), 2021, 3(3): 82-93.
|
|
|
|
| [102] |
严国军, 贲能军, 杨彦, 等. 基于自适应模糊PID控制的农用作业机械轨迹跟踪系统研究[J]. 重庆理工大学学报(自然科学), 2019, 33(4): 83-87, 115.
|
|
|
|
| [103] |
王茂励, 段杰, 唐勇伟, 等. 基于模糊PID算法的农机自动转向系统研究[J]. 农机化研究, 2018, 40(11): 241-245.
|
|
|
|
| [104] |
|
| [105] |
|
| [106] |
栾世杰, 孙叶丰, 贡亮, 等. 基于MPC延时补偿器的农机多机器人编队行驶轨迹跟踪方法[J]. 智慧农业(中英文), 2024, 6(3): 69-81.
|
|
|
|
| [107] |
杨琰, 张瑞瑞, 张林焕, 等. 基于DQN的智能农机路径跟踪控制研究[J]. 农机化研究, 2025, 47(3): 28-34.
|
|
|
| [1] | CHEN Ruotong, LIU Jifang, ZHANG Zhiyong, MA Nan, WEI Peigang, WANG Yi, YANG Yantao. Intelligent Inspection Path Planning Algorithm for Large-Scale Cattle Farms [J]. Smart Agriculture, 2026, 8(1): 178-191. |
| [2] | MA Nan, CAO Shanshan, BAI Tao, KONG Fantao, SUN Wei. Research Progress and Prospect of Multi-robot Collaborative SLAM in Complex Agricultural Scenarios [J]. Smart Agriculture, 2024, 6(6): 23-43. |
| [3] | HE Yong, HUANG Zhenyu, YANG Ningyuan, LI Xiyao, WANG Yuwei, FENG Xuping. Research Progress and Prospects of Key Navigation Technologies for Facility Agricultural Robots [J]. Smart Agriculture, 2024, 6(5): 1-19. |
| [4] | XU Jishuang, JIAO Jun, LI Miao, LI Hualong, YANG Xuanjiang, LIU Xianwang, GUO Panpan, MA Zhirun. Path Planning and Motion Control Method for Sick and Dead Animal Transport Robots Integrating Improved A * Algorithm and Fuzzy PID [J]. Smart Agriculture, 2023, 5(4): 127-136. |
| [5] | ZHOU Longgang, LIU Ting, LU Jinzhu. Traversal Path Planning for Farmland in Hilly Areas Based on Floyd and Improved Genetic Algorithm [J]. Smart Agriculture, 2023, 5(4): 45-57. |
| [6] | MAO Wenju, LIU Heng, WANG Dongfei, YANG Fuzeng, LIU Zhijie. Improved AODV Routing Protocol for Multi-Robot Communication in Orchard [J]. Smart Agriculture, 2021, 3(1): 96-108. |
| [7] | Zhu Jiangpeng, Cen Haiyan, He Liwen, He Yong. Development and performance evaluation of a multi-rotor unmanned aircraft system for agricultural monitoring [J]. Smart Agriculture, 2019, 1(1): 43-52. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







