



0 引 言
在拖拉机轨迹跟踪控制方面,已有研究提出了多种控制算法。例如,基于车辆运动学模型的Stanley[5]和Pure Pursuit[6-8]方法,以及基于动态控制理论的比例积分微分(Proportion Integral Differential, PID)[9, 10],线性二次调节器(Linear Quadratic Regulator, LQR)[11],模型预测控制(Model Predictive Control, MPC)[12],模糊逻辑控制[13]和滑模控制器(Sliding Mode Controller, SMC)[14]等。这些方法主要关注如何生成跟踪期望路径所需的前轮转角与速度指令,但大多未将转向执行机构动态特性纳入整体控制框架中。
目前,拖拉机转向系统主要包括全液压转向、线控液压及电动助力转向3种类型。全液压转向系统因成本低、可靠性高而应用广泛,但其存在转向力大、振动明显、控制精度有限,以及在极端条件下响应滞后等问题;线控液压与电动助力转向系统能够满足基本跟踪需求,但在高精度、强扰动、大负载等复杂工况下,其控制精度与鲁棒性仍显不足[2, 15]。为此,学者提出了线控转向(Steer-by-wire, SBW)系统,其通过电子信号取代传统机械连接,提高了设计灵活性与安全性[16, 17]。吕华伟等[2]、房素素等[15]及Li等[18]通过试验测试表明:与全液压转向系统相比,线控转向系统可以显著降低转向误差,提高转向性能。由于SBW系统采用电信号控制拖拉机的转向,使得越来越多的研究将SBW系统同自动驾驶结合在一起,证明了SBW系统在提高自动驾驶性能上的显著优势[19, 20]。Jin等[21]、Wei等[22]将SBW系统设计为自动驾驶拖拉机的转向机构,提高了控制精度。鲁植雄等[23]设计了双通道PID算法作为SBW系统的控制器,提升了拖拉机转向系统的响应速度。陈新等[24]设计了自适应PID滑模控制策略,解决了SBW系统中非线性、参数摄动和外部干扰等因素导致控制器性能下降的问题,提高了自动驾驶性能。
然而,现有SBW系统多采用单电机作为执行器。由于方向盘与车轮间缺乏机械连接,转向完全依赖电动执行机构,一旦电机发生故障,将导致系统完全失效,引发严重安全事故[25]。此外,单电机在低速重载工况下输出扭矩不足,难以满足高精度轨迹跟踪对动力与容错性的要求[26]。针对这个问题,学者开始引入双电机SBW系统。Zou等[25]提出了一种基于自抗扰控制的双电机同步策略,提高了传统SBW系统的跟踪性能与可靠性。Shi等[26]设计了以双三相永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)为核心的SBW方案,增强了自动驾驶车辆横向控制的能力。Jung等[27]则通过无源分解结合SMC控制技术,实现了双电机协同运动中的鲁棒性与稳定性。尽管上述研究在乘用车及特种车辆领域展现出良好效果,然而在面向重载、强扰动、非结构化作业环境的自动驾驶拖拉机时,仍难以有效抑制外部干扰并提供持续高扭矩输出,控制鲁棒性尚不足。尤其值得注意的是,将高级轨迹跟踪算法与高可靠性双电机执行机构进行深度耦合的研究,在农业领域尤为匮乏。
因此,为解决无人驾驶拖拉机转向系统因精度与鲁棒性不足难以满足高精度轨迹跟踪需求,以及单电机SBW系统存在的扭矩受限与容错性较差等问题,本研究提出一种面向无人驾驶拖拉机的轨迹跟踪与双电机SBW系统集成控制方法。区别于乘用车及特种车辆领域的方案,本研究针对拖拉机低速重载、工况复杂等特点,设计了基于滑模控制(SMC)的高鲁棒性底层控制器,并结合干扰观测器(Disturbance Observer, DOB)以抑制抖振现象。本研究创新性地构建了“LQR + SMC + DOB”分层控制架构,其中上层LQR控制器实现轨迹跟踪并生成期望转角,底层SMC+DOB控制器实现双电机系统的强鲁棒协同控制。仿真与现场试验结果表明,所提策略不仅有效提升了转向精度与系统容错能力,也显著增强了拖拉机在高、低速工况下的轨迹跟踪精度。
1 模型设计
1.1 拖拉机动力学设计
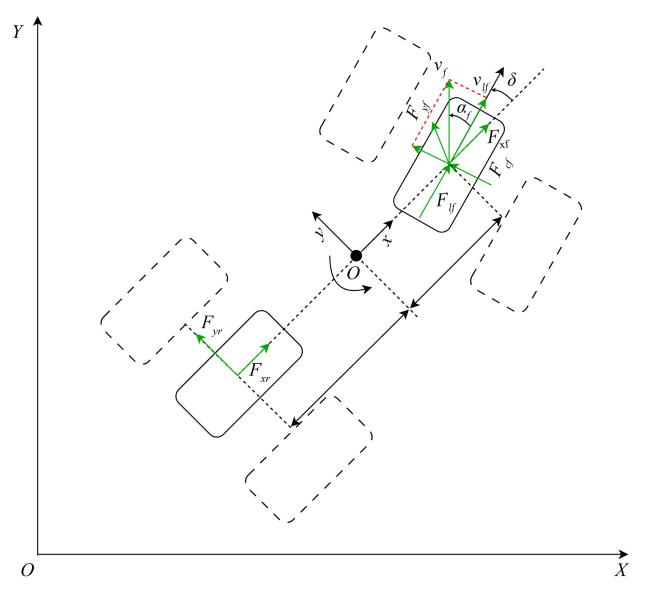
式中:m为拖拉机的质量; 为转动惯量。
根据拖拉机运动的几何关系,假设拖拉机轮胎作用于线性区域,滑移率较小,则每个轮胎的侧向力和纵向力如公式(2) 所示。
式中: 和 分别为拖拉机前、后轮胎的转角刚度; , 分别为拖拉机前、后轮胎的滑移率。
拖拉机轮胎的滑移率可由公式(3) 获取。
式中:r为车轮半径; 为车轮旋转角速度。
联合公式(1)~公式(3) 可得简化后的两轮拖拉机动力学方程,如公式(4) 所示。
选取状态量 =[ ],控制量 ,可得系统的状态空间方程,如公式(5) 所示。
式中: A 为 的雅可比矩阵, B 为u的雅可比矩阵。
1.2 SBW双电机模型设计
图2为双电机SBW系统的机械结构图,由车辆控制元件、控制器和电机驱动器组成。
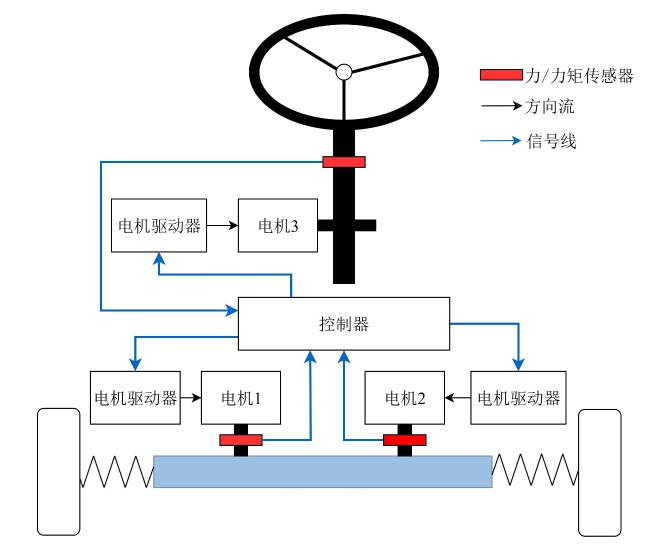
双电机SBW系统模型包括电子模型和机械模型。本研究选择两个参数相同的PMSM作为执行器,且两个电机通过减速器和小齿轮与齿条连接。假设两个执行器电机与减速器刚性连接,且所选双减速器的速比相同,则电机1的电机模型可用公式(6) 表示[29]。
电机2的电机模型可用公式(7) 表示。
双电机的机械模型可用公式(8) 和公式(9) 表示。
行驶阻力可用公式(10) 表示。
表1为上述双电机SBW系统模型参数名称。
表1 双电机SBW系统模型参数Table 1 Model parameters of the dual-motor SBW system |
| 参数 | 含义 |
|---|---|
| , | 两个电机的控制电压 |
| , | 两个电机的电枢电感 |
| , | 两个电机的电流 |
| , | 两个电机的力矩系数 |
| 两个电机的磁通量 | |
| , | 两个电机的转角 |
| , | 两个电机的电阻 |
| 两个电机的和力矩 | |
| , | 两个电机的力矩 |
| 等效转动惯量 | |
| 等效阻尼系数 | |
| 减速器减速比 | |
| 减速器传动效率 | |
| 分别为回正力矩、车轮在纵向、横向和垂向方向产生的阻力矩 |
2 控制系统设计
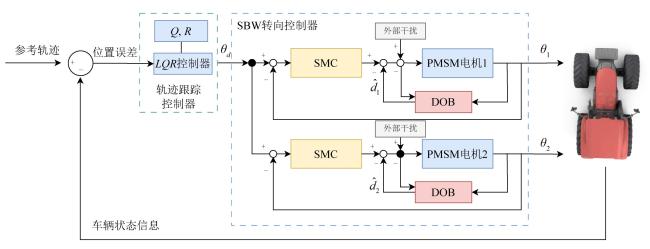
本节将构建基于双电机SBW系统的轨迹跟踪控制系统。整个系统的控制结构如图3所示,主要包括轨迹跟踪控制器与SBW转向控制器两大模块。轨迹跟踪控制器采用LQR生成期望前轮转角;SBW转向控制器则根据该转角指令,通过集成DOB的SMC算法,解算并输出双电机的协同控制信号。在此基础上,为进一步协调双电机运行,还需设计相应的协同控制策略,以实现双电机间的同步与容错运行。
2.1 LQR控制器设计
根据公式(5) 的离散误差模型计算最优反馈控制 ,如公式(11) 所示。
式中:K为增益值;e(t)为前轮转角误差。
设置最优控制的目标函数,如公式(12) 所示。
则被控线性系统可用公式(13) 所示。
式中:K可由公式(14) 得出。
式中:P为公式(15) 中代数Ricatti方程的解。
式中: Q 为1个半正定矩阵用来控制收敛速率; R 为1个正定矩阵用来惩罚控制输入。
将前馈和反馈输入联合起来可得LQR控制器的最终控制输入,如公式(16) 所示。
2.2 双电机SBW系统控制器设计
2.2.1 电机协同控制策略
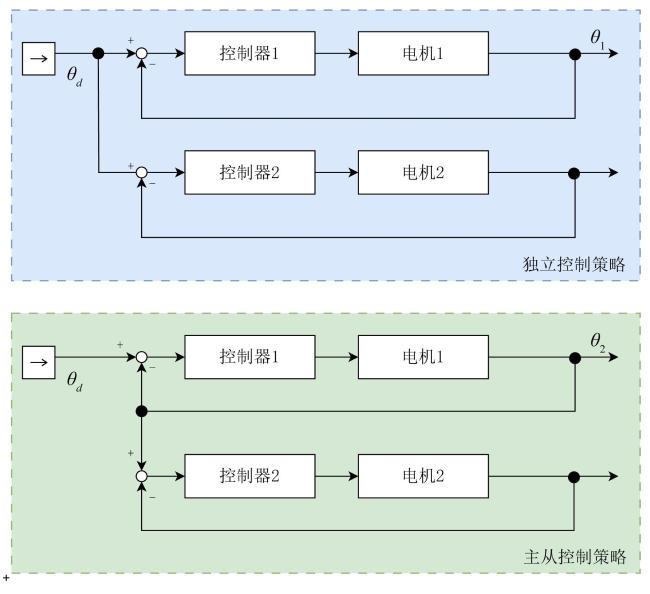
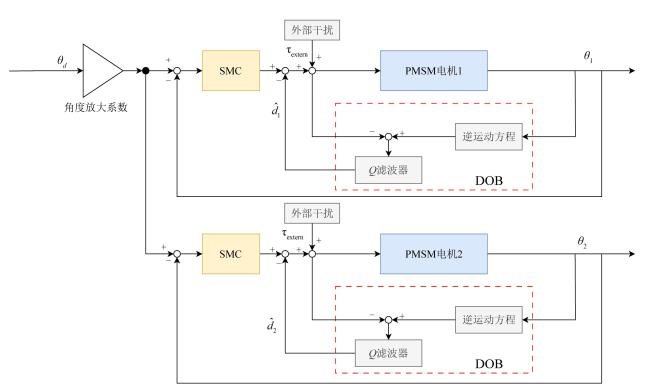
在独立控制策略中,各电机系统的动态与响应特性相互匹配,并采用统一的参考输入信号,适用于动态特性相近的双电机系统,有利于实现系统的高效控制。此外,由于两电机在控制结构上相互独立,单一电机的故障不会直接干扰另一电机的运行,从而在部分故障条件下仍可维持系统功能,具备较强的容错能力。鉴于本研究所采用的两台电机参数一致,综合考虑控制效率与系统容错性要求,最终选择独立控制策略作为双电机协同方案,其控制系统结构如图6所示, 为目标转角, 为外部干扰, , 分别为估计的电机1和电机2的扰动量。
2.2.2 SMC控制器设计
SMC是一种能够有效处理系统非线性和不确定性的鲁棒控制方法,其通过构造滑动模态,使系统在该模态上对参数摄动和外部扰动具有不变性。SMC控制器的设计主要包括两个步骤:首先,设计1个滑模面,使系统在该滑模面上呈现期望的动态特性;其次,设计趋近律,以保证系统状态能够在有限时间内到达并维持在滑动面上[30]。为实现上述目标,分别定义跟踪误差 和滑模面函数 ,如公式(17) 和公式(18) 所示。
式中: 为电机的期望转角; 为电机的角度位置(n=1,2); 为正反馈增益。为了达到控制要求,滑模面应该满足公式(19) 所示的到达条件:
机械模型的动态方程如公式(20) 所示。
式中: 为电机驱动扭矩; 为电机扰动量(n=1,2)。
由公式(19)~公式(21) 可得公式(21) 所示的控制律。
利用Lyapunov原理验证该控制系统的稳定性,设计公式(22) 所示的Lyapunov方程[31]。
对公式(22) 求导可得公式(23) 。
从公式(22) 和公式(23) 可以看出,跟踪误差 可以渐进收敛到0,证明了该控制系统的稳定性。
2.2.3 带DOB的SMC控制器设计
可以看出SMC对系统的匹配干扰和参数不确定性具有强鲁棒性,但因为滑模面的特征使得SMC控制器容易出现抖振问题,限制了它的应用。DOB则是一种有效估计并补偿系统总扰动(包括外部干扰、建模动态和参数变化)的技术。将两者结合,可以形成优势互补的控制策略。该控制机制的核心在于:DOB利用系统额定模型和实际输出作为系统的前馈补偿器,通过低通滤波器(Q滤波器)在线估计总扰动。该估计值被直接注入到SMC控制器中,用于抵消大部分实际扰动。SMC则演变为“鲁棒反馈控制器”,其控制律由基于额定模型的等效控制、干扰观测器提供的前馈补偿以及一个显著弱化的切换控制项组成[29]。
这种配合的优势在于:DOB补偿了绝大部分扰动,使得SMC的切换增益可以大幅降低。这直接导致控制信号的抖振被显著抑制,同时保持了SMC的鲁棒性本质。弱化的切换项只需处理DOB估计后的残余扰动和建模误差,确保了系统仍能在小边界层内实现“准滑模”运动。最终效果是系统在强干扰和不确定性下,既能实现高精度、强鲁棒的跟踪控制,又能有效避免执行机构的高频抖振,提升了整体性能和可靠性。DOB的设计是平衡扰动估计精度、噪声抑制和鲁棒稳定性的关键[32]。因此,系统输出 可由公式(24) 表示。
式中: ; 为Q滤波器; 为传感器噪声。
这表明,实际系统的表现与额定模型相同,整块干扰被DOB衰减了。因此,可以通过额定模型来设计控制器。
为了证明闭环控制系统的稳定性,额定电机系统的机械动力学模型可用公式(26) 表示。
式中: 分别为干扰的低频部分和高频部分。由公式(21) 、公式(24)~公式(26) 可以得到闭环误差系统的动力学表达式,如公式(27) 所示。
式中: 为总干扰中的低频部分的估计误差。假设为公式(28) 。
在低于Q滤波器截止频率的频率范围内,从干扰到跟踪误差的闭环传递函数可用公式(29) 表示。
3 试验测试
3.1 仿真测试
仿真测试旨在验证双电机SBW系统的转角跟踪性能,并评估DOB对SMC控制器的性能增强效果,为后续现场试验提供理论支撑与参数依据。为具体验证所设计DOB在干扰抑制方面的有效性,本研究设置了两种仿真对比方案。方法一:在双电机SBW系统中仅采用SMC作为控制器;方法二:在SMC基础上引入DOB,构建SMC+DOB复合控制器。仿真基于Matlab-Carsim联合仿真平台进行,系统结构如图7所示。
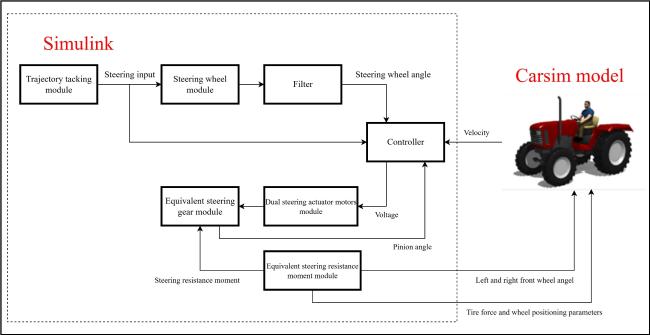
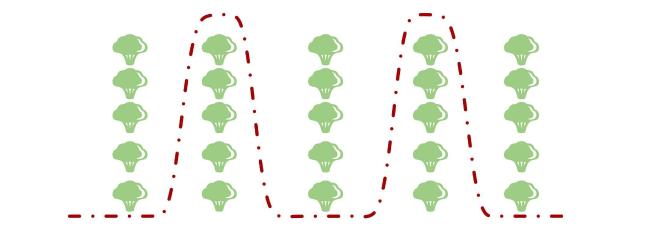
图8 双电机SBW系统转角跟踪性能仿真测试工况Fig.8 Simulation test scenario of dual-motor SBW system steering angle tracking performance |
表2 拖拉机及控制系统参数Table 2 Parameters of tractor and control system. |
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| m | 3 425 kg | bm | 0.42 Nm·s/rad |
| 1 150 mm | K 1=K 2 | 320 Nm·s/rad | |
| 1 100 mm | K 12 | 0.09 Nm/A | |
| 13 125 | L 1=L 2 | 2.12e-3H | |
| 15 500 | R 1=R 2 | 0.04 Ω | |
| Q | diag(1,1,1) | G | 30 |
| R | diag(0.3,0.3) | η | 0.98 |
| J | 0.09 kg·m2 |
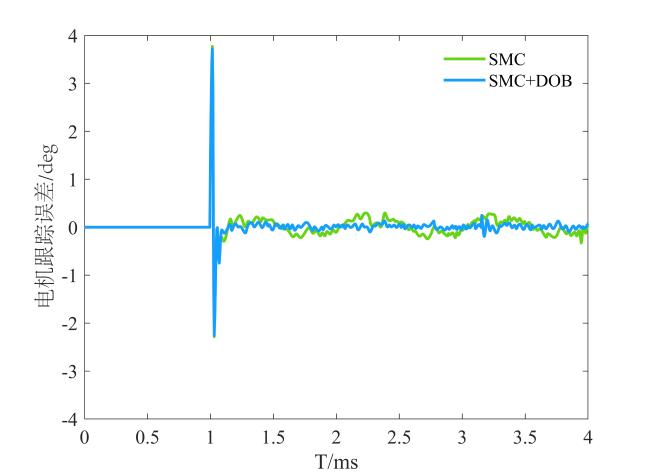
从图9中可以看出,双电机SBW系统在执行前轮转角控制的时候可以快速地将前轮转角收敛到期望转角上。相较于未采用DOB的SMC方法,设计的DOB可以有效抑制电机干扰,降低前轮转角跟踪误差13.12%。
3.2 现场试验测试
3.2.1 试验平台
为验证本研究所提控制方法的有效性,搭建了基于T954拖拉机的实车试验平台,其整体结构如图10所示。该平台控制系统主要由轨迹跟踪系统与SBW系统两大部分构成。轨迹跟踪系统以Jetson Orin NX嵌入式模块作为上位机,承担参考轨迹生成与前轮期望转角计算任务;定位模块采用GNSS/RTK组合导航系统,可提供厘米级精度的实时位姿信息;同时,采用惯性测量单元(Inertial Measurement Unit, IMU)实时采集拖拉机的线加速度与角速度数据。线控转向系统以STM32F407微控制器为核心,负责接收上位机下发的转角指令,并将其转换为电机转速控制信号。执行机构采用两台额定功率为500 W的PMSM电机,兼具霍尔编码器与线性编码器反馈功能,结合专用电机驱动器构成电机转速闭环控制系统,实现对转向机构的精确驱动。

全部控制算法均部署于机器人操作系统(Robot Operating System, ROS)框架内,通过定制的运动控制节点生成轨迹跟踪指令,并基于CAN总线通信协议将电机转速控制指令传输至永磁同步电机驱动器,最终完成转向执行任务。
3.2.2 试验方案
试验场景选取农业作业中典型的“几”字型路径,该路径包含直线与曲线段,可有效模拟实际作业场景,如图11所示。为全面评估控制策略的有效性,在试验设计中引入MPC控制器作为对比基准,共构建3组对比方案:第1组采用LQR作为轨迹跟踪控制器,SMC作为SBW系统控制器(LQR+SMC);第2组采用MPC作为轨迹跟踪控制器,SBW系统采用SMC+DOB控制器(MPC+SMC+DOB);第3组采用LQR作为轨迹跟踪控制器,SBW系统采用SMC+DOB控制器(LQR+SMC+DOB)。为考察不同车速下的控制性能,试验设定了两种典型工况速度:低速作业工况(10 km/h)与高速转运工况(30 km/h)。评价指标包括横向平均跟踪误差、纵向平均跟踪误差、航向角误差、纵向速度跟踪误差、平均质心侧偏角以及前轮转角误差,以综合评估系统的轨迹跟踪性能与控制效果。

3.3 试验结果及分析
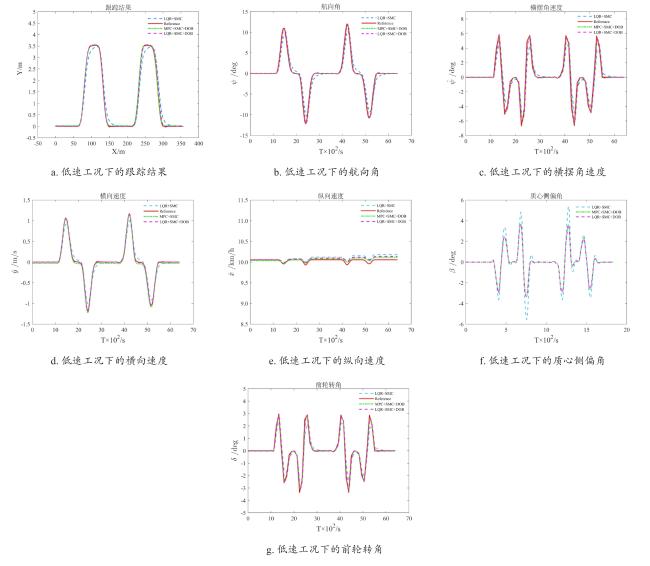
低速工况下的试验结果如图12所示。
低速工况下的性能指标平均误差如表4所示。
表4 拖拉机低速工况下的轨迹跟踪性能指标平均误差Table 4 Average error of trajectory tracking performance index of tractor under low-speed scenario |
| LQR+SMC | MPC+SMC+DOB | LQR+SMC+DOB | |
|---|---|---|---|
| 横向跟踪误差/m | 0.070 | 0.053 | 0.056 |
| 纵向跟踪误差/m | 0.1 | 0.041 | 0.07 |
| 航向角误差/deg | 0.5 | 0.28 | 0.3 |
| 纵向速度跟踪误差/(km/h) | 0.6 | 0.41 | 0.5 |
| 平均质心侧偏角/deg | 1.201 | 1.116 | 1.123 |
| 前轮转角误差/deg | 0.35 | 0.27 | 0.3 |
| 单次计算用时/s | 0.015 2 | 0.321 2 | 0.016 1 |
与目前未采用SBW系统的拖拉机轨迹跟踪研发相比[33],在低速工况下,3种控方法都能实现稳定的轨迹跟踪。其中,3种方法的横向跟踪误差均小于未使用SBW系统的0.039 m跟踪误差,表明采用SBW系统对于轨迹跟踪性能的提升效果显著;3种方法的航向角误差均低于未使用SBW系统的1.62 deg,表明设计的前馈-反馈控制律可有效抑制侧向力引起的失稳趋势,符合农机稳定性要求。
通过对比LQR+SMC与LQR+SMC+DOB两种控制方法的实验结果可知,在低速工况下,LQR+SMC+DOB方法在横向平均跟踪误差、航向角误差、平均质心侧偏角及前轮转角误差方面,相较于LQR+SMC方法分别降低了19.9%、40.2%、6.5%和14.3%。该结果验证了所设计的DOB在抑制电机干扰、提升系统跟踪性能方面的有效性。进一步将LQR+SMC+DOB与MPC+SMC+DOB进行对比可知,尽管前者在轨迹跟踪性能方面与后者表现接近,但其单次计算时间显著缩短,体现出更高的计算效率。此外,表中数据表明,LQR+SMC+DOB方法所实现的较低横向误差与航向误差,为纵向速度控制提供了更为平稳的工作环境,减少了因横向偏差补偿所需的频繁加减速调整,进而间接贡献于更稳定的速度保持与更优的整体轨迹跟踪效果。
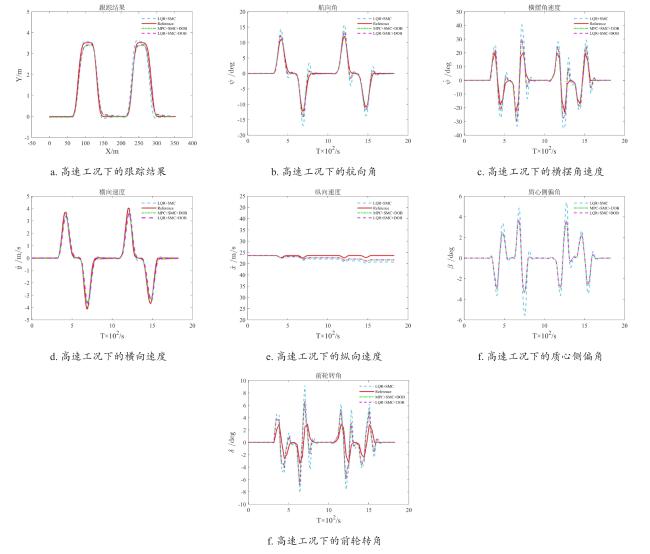
高速工况下的试验结果如图13所示。
高速工况下的性能指标平均误差如表5所示。
表5 拖拉机高速工况下的轨迹跟踪性能指标平均误差Table 5 Average error of trajectory tracking performance index of tractor under high-speed scenario |
| LQR+SMC | MPC+SMC+DOB | LQR+SMC+DOB | |
|---|---|---|---|
| 横向跟踪误差/m | 0.13 | 0.077 | 0.099 |
| 纵向跟踪误差/m | 0.12 | 0.071 | 0.083 |
| 航向角误差/deg | 2.3 | 0.9 | 1.1 |
| 纵向速度跟踪误差/(km/h) | 0.9 | 0.66 | 0.7 |
| 平均质心侧偏角/deg | 2.864 | 2.776 | 2.735 |
| 前轮转角误差/deg | 2.2 | 1.3 | 1.6 |
| 单次计算用时/s | 0.016 2 | 0.331 2 | 0.016 8 |
与未采用SBW系统的拖拉机轨迹跟踪方案相比[34],在高速工况下,所有方法的横向跟踪误差与航向角误差均较低速工况有所增大,表明随速度提升系统非线性增强,导致控制难度增加。然而,本研究所采用的3种控制策略其横向跟踪误差与航向角误差均显著低于无SBW系统,说明SBW结构在改善高速跟踪性能方面具备明显优势。同时,更低的航向误差也反映出所设计的前馈-反馈控制律有效抑制了侧向力引发的失稳趋势,符合农机行驶稳定性要求。
对比LQR+SMC与LQR+SMC+DOB两种方法的实验结果可见,在高速工况下,后者在横向平均跟踪误差、航向角误差、平均质心侧偏角及前轮转角误差方面较前者分别降低了23.7%、52.2%、4.5%和27.3%,进一步验证了DOB在复杂工况下抑制扰动、提升控制精度的有效性。与MPC+SMC+DOB方法相比,LQR+SMC+DOB在保持相近轨迹跟踪性能的同时,大幅降低了单次计算时间,表现出更优的计算效率。此外,该方法所实现的较低横向与航向误差,为纵向控制提供了更为平稳的底层动力学环境,减少了为补偿横向偏差所需的纵向速度频繁调节,从而间接提升了整体轨迹跟踪的平滑性与稳定性。
4 结 论
1)本研究提出了一种融合上层轨迹跟踪与底层线控转向的分层协同控制架构,将LQR与双电机SBW系统相结合,有效提升了拖拉机的轨迹跟踪精度。实验表明,该控制策略在低速和高速工况下的跟踪性能均优于未采用双电机SBW系统的方法。
2)本研究所采用的双电机SBW系统,相较于单电机系统,显著增强了转向输出扭矩与系统容错能力,为解决拖拉机重载工况下的转向动力不足和安全性问题提供了有效方案。
3)本研究设计了结合SMC与DOB的强鲁棒控制策略。实验结果表明,该控制方法能够有效抑制外部扰动并显著削弱系统抖振。与未引入DOB的滑模控制方法相比,所提出策略在低速工况下横向平均跟踪误差、航向角误差、质心侧偏角及前轮转角误差分别降低19.9%、40.2%、6.5%和14.3%,高速工况下分别降低23.7%、52.2%、4.5%和27.3%,显著提升了轨迹跟踪的控制精度。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}