LI Lei1,2,3, PAN Liang1,2,3, DONG Jiwei1,2,3, CAO Zhonghua1,2,3, LUO Xingfa1,2,3, ZHAN Xiaomei1,2,3( ), LI Yali1,2,3, SUN Zhiqiang1,2,3
), LI Yali1,2,3, SUN Zhiqiang1,2,3
Received:2025-07-17
Online:2025-10-21
Foundation items:Chongqing Municipal Fiscal Science and Technology Innovation(KYLX20240500075); Chongqing Scientific Research Institutions Performance Incentive and Guidance Project(CSTB2024JXJL-YFX0004); Chongqing Municipal Fiscal Science and Technology Innovation(KYLX20240500039)
About author:LI Lei, E-mail: lileiCBD@163.com
corresponding author:
CLC Number:
LI Lei, PAN Liang, DONG Jiwei, CAO Zhonghua, LUO Xingfa, ZHAN Xiaomei, LI Yali, SUN Zhiqiang. Research on Tractor Trajectory Tracking Control Based on A Dual-Motor Steer-by-Wire System[J]. Smart Agriculture, doi: 10.12133/j.smartag.SA202507027.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202507027

Fig. 1
Tractor dynamics model converted from four wheels to two wheels

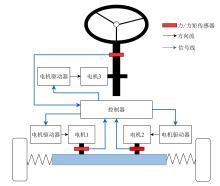
Fig.2
Mechanical model of dual SBW

Table 1
Model parameters of the dual-motor SBW system
| 参数 | 含义 |
|---|---|
| , | 两个电机的控制电压 |
| , | 两个电机的电枢电感 |
| , | 两个电机的电流 |
| , | 两个电机的力矩系数 |
| 两个电机的磁通量 | |
| , | 两个电机的转角 |
| , | 两个电机的电阻 |
| 两个电机的和力矩 | |
| , | 两个电机的力矩 |
| 等效转动惯量 | |
| 等效阻尼系数 | |
| 减速器减速比 | |
| 减速器传动效率 | |
| 分别为回正力矩、车轮在纵向、横向和垂向方向产生的阻力矩 |

Fig.3
Control diagram of trajectory tracking system of tractor

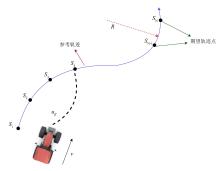
Fig. 4
Feed-forward control of LQR controller

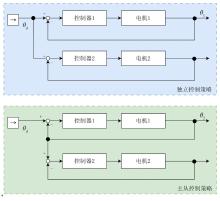
Fig. 5
Dual-motor SBW system synchronous control strategy

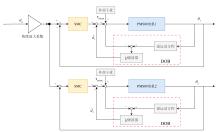
Fig 6
Control diagram of dual-motor SBW system

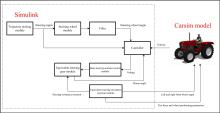
Fig. 7
Carsim-MATLAB joint control simulation block diagram for steering angle tracking performance test


Fig.8
Simulation test scenario of dual-motor SBW system steering angle tracking performance

Table 2
Parameters of tractor and control system.
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| m | 3 425 kg | bm | 0.42 Nm·s/rad |
| 1 150 mm | K 1=K 2 | 320 Nm·s/rad | |
| 1 100 mm | K 12 | 0.09 Nm/A | |
| 13 125 | L 1=L 2 | 2.12e-3H | |
| 15 500 | R 1=R 2 | 0.04 Ω | |
| Q | diag(1,1,1) | G | 30 |
| R | diag(0.3,0.3) | η | 0.98 |
| J | 0.09 kg·m2 |
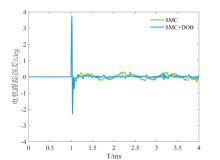
Fig. 9
Tracking error of steering angle of dual-motor SBW system using two methods

Table 3
Comparison of control performance using two methods
| 方法 | 跟踪误差 | |
|---|---|---|
| 均方根 | 最大误差 | |
| 方法1 (SMC) | 0.256 0 | 3.821 1 |
| 方法2 (SMC+DOB) | 0.222 4 | 3.764 2 |

Fig. 10
Experiment platform based on T954 tractor


Fig. 11
Experiment reference trajectory of tractor.


Fig. 12
Trajectory tracking experiment results of tractor under low-speed scenario

Table 4
Average error of trajectory tracking performance index of tractor under low-speed scenario
| LQR+SMC | MPC+SMC+DOB | LQR+SMC+DOB | |
|---|---|---|---|
| 横向跟踪误差/m | 0.070 | 0.053 | 0.056 |
| 纵向跟踪误差/m | 0.1 | 0.041 | 0.07 |
| 航向角误差/deg | 0.5 | 0.28 | 0.3 |
| 纵向速度跟踪误差/(km/h) | 0.6 | 0.41 | 0.5 |
| 平均质心侧偏角/deg | 1.201 | 1.116 | 1.123 |
| 前轮转角误差/deg | 0.35 | 0.27 | 0.3 |
| 单次计算用时/s | 0.015 2 | 0.321 2 | 0.016 1 |

Fig. 13
Trajectory tracking experiment results of tractor under high-speed scenario

Table 5
Average error of trajectory tracking performance index of tractor under high-speed scenario
| LQR+SMC | MPC+SMC+DOB | LQR+SMC+DOB | |
|---|---|---|---|
| 横向跟踪误差/m | 0.13 | 0.077 | 0.099 |
| 纵向跟踪误差/m | 0.12 | 0.071 | 0.083 |
| 航向角误差/deg | 2.3 | 0.9 | 1.1 |
| 纵向速度跟踪误差/(km/h) | 0.9 | 0.66 | 0.7 |
| 平均质心侧偏角/deg | 2.864 | 2.776 | 2.735 |
| 前轮转角误差/deg | 2.2 | 1.3 | 1.6 |
| 单次计算用时/s | 0.016 2 | 0.331 2 | 0.016 8 |
| [1] |
满忠贤, 何杰, 刘善琪, 等. 智能农机多机协同收获作业控制方法与试验[J]. 农业工程学报, 2024, 40(1): 17-26.
|
|
|
|
| [2] |
吕华伟, 鲁植雄, 黄薛凯, 等. 基于IWOA-RBF神经网络预测的拖拉机线控液压转向系统传递函数参数辨识[J/OL]. 南京农业大学学报. (2024-11-21)[2025-07-02].
|
|
|
|
| [3] |
孟志军, 王昊, 付卫强, 等. 农业装备自动驾驶技术研究现状与展望[J]. 农业机械学报, 2023, 54(10): 1-24.
|
|
|
|
| [4] |
徐立友, 陶源, 张俊江, 等. 考虑轨迹跟踪性能与经济性的无人驾驶HMCVT拖拉机分层协同控制策略研究[J]. 农业机械学报, 2025, 56(2): 61-72, 123.
|
|
|
|
| [5] |
崔冰波, 孙宇, 吉峰, 等. 基于模糊Stanley模型的农机全田块路径跟踪算法研究[J]. 农业机械学报, 2022, 53(12): 43-48, 88.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
杨杭旭, 周俊, 齐泽中, 等. 基于时序分析与前馈PID的温室电动拖拉机旋耕稳定性研究[J/OL]. 农业机械学报, 2024: 1-12. (2024-01-16) [2025-07-02].
|
|
|
|
| [11] |
|
| [12] |
徐立鸿, 陈戎泉, 袁洪良. 含斜坡扰动的轮式拖拉机路径跟踪控制方法[J]. 农业机械学报, 2023, 54(11): 421-430.
|
|
|
|
| [13] |
邵明玺, 辛喆, 江秋博, 等. 拖拉机后悬挂横向位姿调整的模糊PID控制[J]. 农业工程学报, 2019, 35(21): 34-42.
|
|
|
|
| [14] |
|
| [15] |
房素素, 鲁植雄, 王增才, 等. 拖拉机线控液压转向系统设计及样车性能试验[J]. 农业工程学报, 2017, 33(10): 86-93.
|
|
|
|
| [16] |
|
| [17] |
杨帆, 滕利, 孙宜田, 等. 农业机械底盘智能化发展现状与展望[J]. 中国农机化学报, 2024, 45(8): 138-147.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
刘军, 袁俊, 蔡骏宇, 等. 基于GPS/INS和线控转向的农业机械自动驾驶系统[J]. 农业工程学报, 2016, 32(1): 46-53.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
鲁植雄, 龚佳慧, 鲁杨, 等. 拖拉机线控液压转向系统的双通道PID控制仿真与试验[J]. 农业工程学报, 2016, 32(6): 101-106.
|
|
|
|
| [24] |
陈新, 张静宜, 丁金刚, 等. 自动驾驶汽车线控转向系统自适应PID滑模控制研究[C]// 2023中国汽车工程学会年会论文集(1). 北京, 中国: 中国汽车工程学会, 2023: 128-130.
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
熊亮雳, 游力, 韩刚, 等. 基于Lyapunov能量函数的单电压环幅值控制构网型储能虚拟阻抗参数整定方法[J]. 电力系统保护与控制, 2025, 53(6): 30-41.
|
|
|
|
| [32] |
|
| [33] |
葛新元. 面向非结构化场景的无人驾驶电动拖拉机路径规划与跟踪控制[D]. 镇江: 江苏大学, 2024.
|
|
|
|
| [34] |
苗河泉. 面向丘陵山区的无人驾驶轮式拖拉机路径跟踪研究[D]. 淄博: 山东理工大学, 2024.
|
|
|
| [1] | LI Lei, SHE Xiaoming, TANG Xinglong, ZHANG Tao, DONG Jiwei, GU Yuchuan, ZHOU Xiaohui, FENG Wei, YANG Qinghui. Obstacle Avoidance Control Method of Electric Skid-Steering Chassis Based on Fuzzy Logic Control [J]. Smart Agriculture, 2026, 8(1): 213-225. |
| [2] | LUAN Shijie, SUN Yefeng, GONG Liang, ZHANG Kai. Trajectory Tracking Method of Agricultural Machinery Multi-Robot Formation Operation Based on MPC Delay Compensator [J]. Smart Agriculture, 2024, 6(3): 69-81. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







