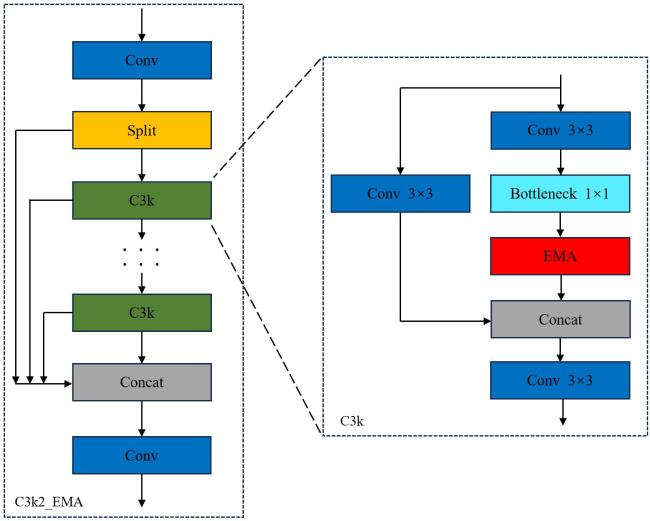
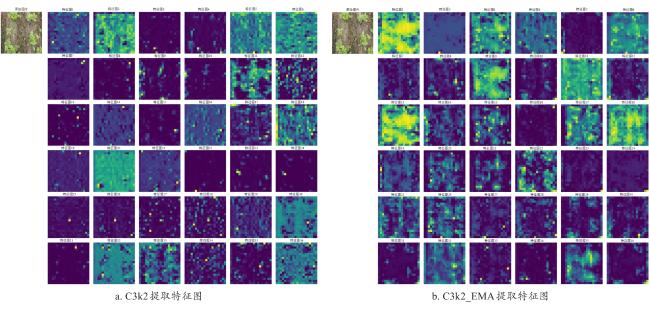
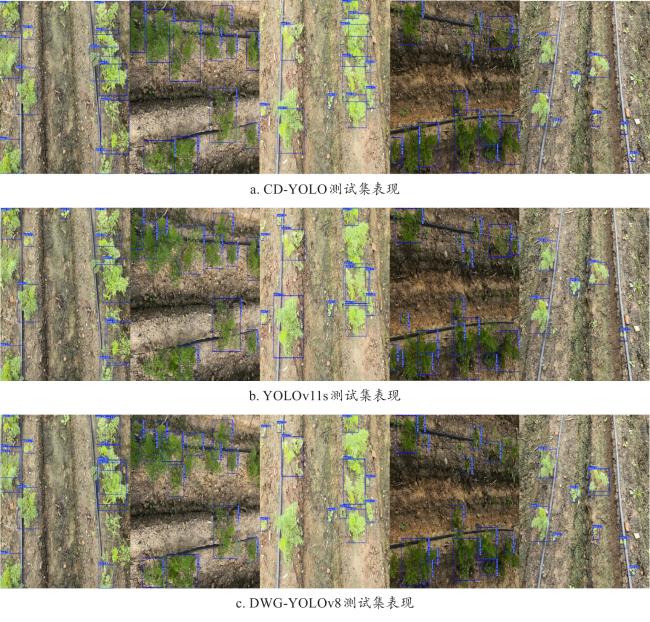
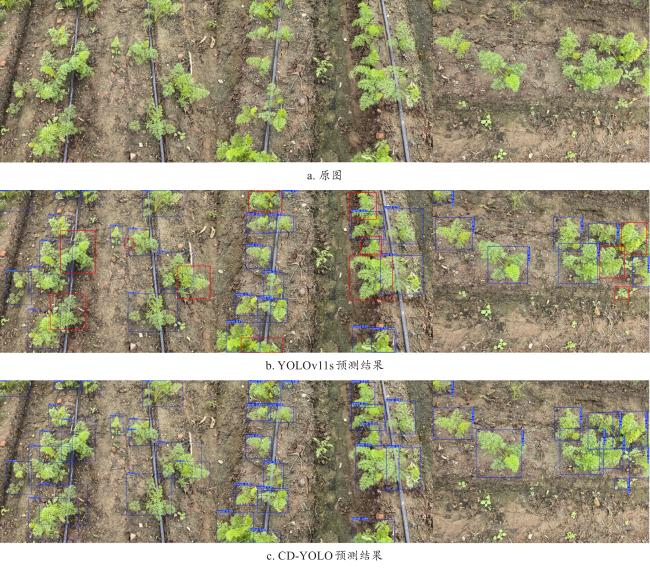
[Objective] In field environments under natural conditions, leaf occlusion and mutual plant shading pose significant challenges to the accurate identification of carrot seedlings. Furthermore, practical agricultural applications often rely on edge devices with limited computational power, necessitating a detection model that combines lightweight design, high accuracy, and robust anti-occlusion capability. The aim is to develop a robust recognition method for carrot seedlings suitable for complex field conditions, thereby enhancing the accuracy and efficiency of seedling emergence statistics in automated seedling raising processes and providing reliable technical support for precise farm management. [Methods] The CD-YOLO (Carrot Detection-YOLO), a lightweight detection model was proposed based on an improved YOLOv11s. Firstly, to reduce model complexity, some standard convolutions (CBS) in the backbone network were replaced with depthwise separable convolutions (DWConv), thereby decreasing Floating-Point Operations (FLOPs) and the number of parameters, establishing a lightweight foundation for edge deployment. Secondly, the efficient multi scale attention (EMA) mechanism was embedded into the critical feature extraction module C3k2, constructing a C3k2_EMA module. This module enhanced dynamic perception of local key features and reconstructed cross-scale contextual dependencies broken by occlusion through its parallel multi-branch structure, effectively suppressing background and occlusion noise. Finally, the DynamicHead detection head was introduced. Leveraging its scale-aware and spatial-aware mechanisms, it achieved dynamic fusion of multi-level features and adaptive weight adjustment, further improving the model's decision-making robustness in complex scenes. To comprehensively evaluate model performance, a carrot seedling dataset covering various field scenarios was independently constructed. Through offline data augmentation, the original 1 274 images were expanded to 4 796, which were then split into training, validation, and test sets in an 8:1:1 ratio. Meanwhile, to systematically quantify the model's anti-occlusion performance, an occlusion severity assessment criterion based on the overlapping area of bounding boxes was proposed. Targets were categorized into three occlusion levels: mild, moderate, and severe. Based on this, a dedicated "Occlusion Test Subset" was separated from the main test set, providing an objective and reproducible benchmark for evaluating the model's anti-occlusion capability. [Results and Discussions] Experimental results on the custom dataset demonstrated that CD-YOLO comprehensively improved detection performance while maintaining its lightweight characteristics. Compared to the baseline model YOLOv11s, CD- YOLO reduced computational load by 6.2 GFLOPs (a 28.8% decrease), decreased model size by 4.8 MB (a 25.0% reduction), improved single-image inference speed by 4.7 ms, reaching 9.6 ms. Concurrently, Precision, Recall, and mean average precision (mAP0.5) increased by 3.0, 1.5, and 2.4 percentage points, respectively, ultimately reaching 81.2%, 76.4%, and 84.0%. In comparisons with other lightweight backbone networks like MobileNetv3 and ShuffleNetv2, CD-YOLO consistently outperformed them on the accuracy-speed comprehensive metric, validating the effectiveness of its improvement strategies. In occlusion performance tests, the missed detection rate of CD-YOLO on the occlusion test subset was 13.4%, a 5.7 percentage points decrease compared to YOLOv11s. Its mAP0.5 on the occlusion subset reached 80.6%, a 5.1 percentage points improvement over the baseline, whereas the improvement on the regular subset was 1.8 percentage points, proving the model's enhanced efficacy in occlusion scenarios. After deploying the model on an NVIDIA Jetson Orin NX edge device and accelerating it with TensorRT, the inference frame rate increased to 32.5 FPS. On random test images, CD-YOLO achieved missed detection and false detection rates of 5.1% and 2.7%, respectively, representing decreases of 7.7% and 2.6% compared to YOLOv11s, demonstrating promising practical application potential. Ablation studies and feature map visualizations further indicated that DWConv, C3k2_EMA, and DynamicHead formed a synergistic optimization loop: DWConv achieved computational compression, freeing up computational budget for subsequent modules; C3k2_EMA enhanced local perception and contextual reconstruction of occluded targets during the feature extraction stage; and DynamicHead performed dynamic fusion of multi-scale features at the decision-making end. Together, they ensured high-precision detection of incomplete targets under limited computational resources. [Conclusions] Through the synergistic design of "lightweighting, feature enhancement, and dynamic fusion", the CD YOLO model achieved an excellent balance between computational efficiency, detection accuracy, and anti-occlusion capability. The model not only significantly reduced reliance on the computational power of edge devices but also effectively improved robustness and adaptability in complex field environments through structured attention and dynamic fusion mechanisms.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}