




1 引 言
传统作物倒伏面积调查主要依靠人工使用全球定位系统(Global Positioning System,GPS)、卷尺等工具进行实地测量和取证,费工费时且低效[5]。相比传统方法,遥感技术的快速发展为作物倒伏的大规模快速监测提供了可能性。相较于卫星遥感和地面遥感,无人机遥感具有精准度高、成本低、可操作性强及高时空分辨率等优点,可进一步为灾害应急响应提供快速支持[6]。Tian等[7]通过提取无人机遥感影像中光谱反射率、植被指数、纹理特征及颜色特征,优化分析相关分类图像特征,构建了高准确度的水稻倒伏监测模型。赵静等[8]将获取的30 m飞行高度下可见光影像和数字表面模型(Digital Surface Model,DSM)遥感影像用于小麦倒伏分类研究,达到倒伏区域精准识别的目的。Sun等[9]利用特征变换预处理60 m飞行高度下的无人机多光谱影像,根据提取的相关特征实现玉米倒伏区域的高精度监测。基于单一飞行高度进行遥感倒伏监测研究其局限性较大,因为不同的飞行场景会导致获取的遥感影像分辨率不同,进而影响无人机影像相关特征数据的稳定性,降低无人机的监测精度和效率。另外,遥感在空间理论发展中也考虑了尺度与地理实体固有的空间属性,因此选择适宜空间分辨率开展研究更具意义。Flores和张昭[10]使用机器学习和深度学习算法,对3种飞行高度(15、46和91 m)无人机数据进行分析, 发现飞行高度对分类精度具有显著差异性,其中ResNet101在91 m采集的数据上表现出与15 m相近的分类效果,提高了数据采集和处理效率。黄艳伟等[11]采用不同监督分类方法比较了不同分辨率无人机多光谱影像对小麦倒伏面积的提取精度,确立了较为适宜的空间分辨率范围。Yu等[12]评估了20、40、80和120 m飞行高度下的无人机遥感影像对小麦倒伏分割精度,结果表明,飞行高度越高分类精度越低。由此可见,基于无人机平台的作物监测研究,更多考虑的是最佳影像空间分辨率下的监测结果,忽略了模型在不同飞行场景的差异性、适用性及飞行效率问题。鉴于此,考虑到适宜的特征优化方法不仅可以达到数据降维和提升模型精度的目的,而且能够保证特征选择的稳定性、鲁棒性和高泛化能力,不易因数据波动产生较大影响[13]。如Chauhan等[14]使用偏最小二乘法判别分析(Partial Least Squares Discrimination Analysis,PLS-DA)筛选RADARSAT-2和Sentinel-1卫星数据集,确定最佳特征变量组合,优化小麦倒伏区域分类模型,提高模型分类精度。
为充分发挥低空无人机遥感的高分辨率及机动灵活优势,为作物长势监测的相关标准化技术流程制定提供参考,本研究从不同特征选择方法与分类器组合入手,分析不同影像空间分辨率间差异情况,探讨模型构建方法在不同空间分辨率影像的适应性问题及鲁棒性,并通过适宜的分类策略优化飞行策略,提高无人机飞行效率,降低作物成本,实现作物倒伏区域的高效监测。
2 材料与方法
2.1 研究区概况
研究区位于河南省新乡市原阳县河南农业大学科教园区,地势平坦,处于华北平原中部,属于温带大陆性气候,年平均气温约14.5℃,年平均降水量约550.4 mm,全年日照时长约2407 h,种植制度主要为冬小麦-夏玉米一年两熟制。2021年小麦灌浆期河南中北部出现强降雨和大风天气,原阳科教园区小麦种植区域出现部分倒伏现象,试验区域地理位置、小区分布及倒伏情况具体见图1。
图1
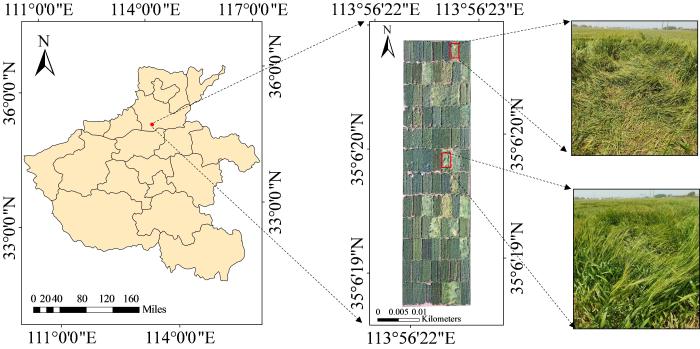
图1
河南省原阳县河南农业大学科教园区内小麦种植区域位置与倒伏图像
(a)河南省原阳县 (b)研究区真彩色影像 (c)倒伏图像
Fig. 1
Location of wheat planting area and image of lodging within the Yuanyang science and education park, Yuanyang county, Henan province
2.2 数据获取与处理
使用大疆M600六旋翼无人机搭载K6多光谱成像仪获取实际小麦倒伏区域多光谱影像。该传感器共5个多光谱通道,包含蓝光波段(450±10 nm)、绿光波段(550±10 nm)、红光波段(685±10 nm)、红边波段(725±10 nm)以及近红外波段(780±10 nm)。在倒伏发生后3天(2021年5月5日)和12天(5月17日)恰值天气晴朗、无风无云天气,设置3个无人机飞行高度30、60和90 m进行飞行区域拍摄,相对应的分辨率约为1.05、2.09和3.26 cm,具体参数见表1。相机拍照模式选择等距间隔拍照,航向重叠率75%,旁向重叠率70%,云台俯仰角度-90°,同时手持实时动态定位(Real-Time Kinematic,RTK)接收机测量地面控制点(Ground Control Point,GCP)的精确地理坐标。使用Pix4Dmapper软件将飞行获取的无人机多光谱影像进行影像拼接,生成DSM和数字正射影像图(Digital Orthophoto Map,DOM),利用ENVI5.3软件对生成的影像进行几何精校正和辐射校正,获得研究区地物反射率信息和地物高程信息。
表1 无人机不同飞行高度影像分辨率和数据统计
Table 1
| 飞行高度/m | 分辨率/(cm·pixel-1) | 飞行时间/s | 照片数量/张 |
|---|---|---|---|
| 30 | 1.05 | 176 | 62 |
| 60 | 2.09 | 56 | 16 |
| 90 | 3.26 | 29 | 6 |
2.3 研究方法
本研究旨在探明无人机不同飞行高度、分类方法及特征选择方法对小麦倒伏分类识别的影响。首先,通过预处理倒伏后3天在不同飞行高度的无人机多光谱遥感影像,选择3类特征构建特征集:光谱特征(波段反射率和植被指数)、利用光谱波段提取的纹理特征集、基于无人机三维点云生成表征高程信息的DSM。采用面向对象分类方法随机森林(Random Forest,RF)、支持向量机(Support Vector Machine,SVM)和K最近邻(K Nearest Neighbor,KNN),分别对不同飞行高度下的全特征集、ReliefF特征子集、RF-RFE特征子集、Boruta-Shap特征子集进行分类精度评价,并利用倒伏后12天影像数据比较两个测定日期之间分类结果,以验证评价分类方法的适应性。同时结合目视解译及遥感影像自身特点,经图像分割后建立分类规则,利用eCognition9.0软件随机选择的196个感兴趣区域(Region of Interest,ROI)用于定义训练样本和137个ROI定义验证样本对区域进行分类研究。具体技术路线见图2。
图2
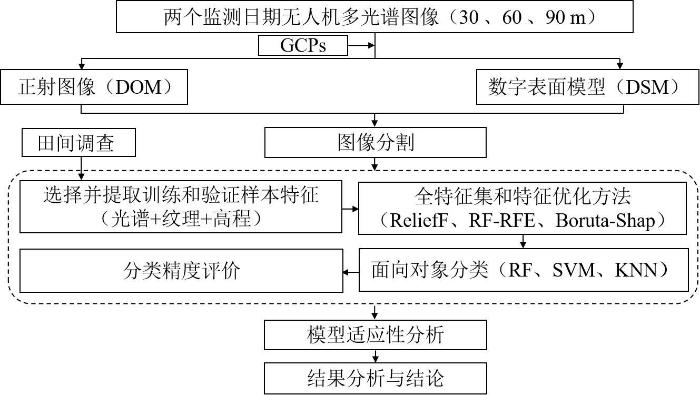
图2
小麦倒伏区域识别技术路线
Fig. 2
Technical flowchart of wheat lodging area indentification
2.4 影像特征提取
植被指数根据两个或多个波长范围内的地物反射率间的组合运算,结果可以突出图像中植被某一特性或细节,本研究结合前人研究结果选择常见的5个多光谱植被指数用于小麦倒伏区域分类,见表2。
表2 小麦倒伏分类研究中使用的植被指数
Table 2
| 植被指数 | 公式 |
|---|---|
| 差值植被指数(Difference Vegetation Index,DVI)[15] | DVI= |
| 归一化植被指数(Normalized Difference Vegetation Index,NDVI)[15] | NDVI= |
| 比值植被指数(Ratio Vegetation Index,RVI)[15] | |
| 优化调节土壤植被指数(Optimization Soil-Adjusted Vegetation Index,OSAVI)[16] | |
| 红边归一化植被指数(Red Edge Normalized Difference Vegetation Index,RENDVI)[17] |
纹理特征表征无人机影像中大量相似且规律性较强或较弱的元素及图形结构,描述光谱波段的空间变异性。由于每个光谱波段的纹理滤波反映出不同的特征信息,本研究利用灰度共生矩阵(Gray Level Co-occurrence Matrix,GLCM)对多光谱5个光谱波段的纹理特征进行提取,共得到40种特征图像,纹理特征参数计算公式具体见文献[18]。
DSM表征包含地表树木、建筑物和作物等高度的地面高程模型,进一步涵盖了除地面以外的其他地表信息的高程。本试验区域地势平坦,仅利用DSM即可反映倒伏小麦的高度特征变化,故提取高度平均值Hmean和标准差Hsd可用于小麦倒伏分类研究。
2.5 特征选择
特征选择的优劣显著影响分类器的性能。数据维度过高,易造成“维度灾难”,有必要剔除相关性较低或无相关的特征变量,提高建模效率,保证分类精度的前提下尽量减少特征变量。
(1)ReliefF特征选择。从训练集中随机选择一个样本R,然后从和R同类的样本集中找出R的k个近邻样本,称为Near Hit;从每个R的不同类的样本集中均找出k个近邻样本,称为Near Miss;根据R和Near Hit及R和Near Miss间的距离,更新每个特征的权重,重复上述过程m次,得到每个特征的平均权重,通过设置阈值保留权重大于阈值的特征或只保留权重最大的前n个特征。
(2)RF-RFE特征选择。将RF作为基分类器,通过增加或移除特定特征变量,找到能最大化模型性能的最优组合变量,基本过程是使用所有特征变量训练模型,计算每个特征变量的重要性进行排序,剔除得分最小的特征变量,基于新数据集训练模型,重计算每个特征变量的重要性并进行排序,重复迭代,直至变量数为0,比较每个特征子集的模型分类效果,选择最优的特征变量集合。
(3)Boruta-Shap特征选择。Boruta-Shap是一种结合Boruta特征选择算法和Shapley值的包装器特征选择方法,该组合在速度和特征子集质量上都优于原来的置换重要性方法,不仅有助于减轻选择高频或高基数变量的影响,而且提供了一个更好的特征子集和最精确的全局特征排名,可用于模型推理。
2.6 分类方法
利用eCognition9.0软件对遥感影像进行面向对象分类研究。多尺度分割是面向对象分类研究中最关键的步骤,通过反复试验验证,确定合适的分割尺度、形状因子和紧密度参数,达到最佳的分割效果。由于研究区域采用小区域种植模式,通过多次实验之后确定分割尺度为1,形状因子确定为0.1,紧致度确定为0.5。并选择支持向量机、随机森林和K最近邻分类器作为作物的倒伏分类手段。
2.7 精度评价
混淆矩阵是通过将每个实测像元的位置和分类与分类图像中的相应位置与分类相比较计算的,是评判模型结果的指标,其中总体分类精度(Overall Accuracy,OA)表示正确分类的类别的像元数与总体像元个数的比值,Kappa系数(Kappa coefficient)用于衡量分类精度,本研究选择上述两个常用指标来评价小麦倒伏识别的正确性,具体如
其中,N代表验证样本的总数,个;n代表混淆矩阵的总列数;
3 结果与分析
3.1 基于影像全特征集的倒伏分类
为比较不同飞行高度下多特征信息对作物倒伏分类效果的影响,利用SVM、RF和KNN分类器对全特征集进行建模分析,使用OA和Kappa系数对不同分类模型精度进行评价,结果见表3,表明在分辨率1.05~3.26 cm范围,影像变化对3种不同分类器具有相同的影响,均表现1.05 cm为最佳分辨率,且随着分辨率降低而分类精度下降。其中从1.05到3.26 cm分辨率,SVM、RF和KNN总体分类精度变化范围别为90.4%~93.7%、85.7%~89.7%和79.8%~85.1%,SVM在分类效果中显著优于RF和KNN分类器。进一步考查在1.05较2.09 cm、1.05较3.26 cm和2.09较3.26 cm的空间分辨率间总体分类精度的相对差异,SVM分别减少1.19%、3.65%和2.43%,RF分别减少2.51%、4.67%和2.10%,KNN分别减少3.40%、6.64%和3.13%。可见,基于遥感影像的全特征集组合,空间分辨率为1.05 cm时,SVM模型的分类效果最优。分类结果如图3所示,当分辨率降低时,错分和漏分错误增加,同种地物被更多地分类成不同类别,导致均一地物被破坏,因此“椒盐现象”越严重。
表3 基于全特征集的小麦倒伏区域分类精度
Table 3
| 分辨率/cm | 特征数量 | SVM | RF | KNN | |||
|---|---|---|---|---|---|---|---|
| OA/% | Kappa | OA/% | Kappa | OA/% | Kappa | ||
| 1.05 | 52 | 93.7 | 0.883 | 89.7 | 0.81 | 85.1 | 0.724 |
| 2.09 | 52 | 92.6 | 0.867 | 87.5 | 0.776 | 82.3 | 0.677 |
| 3.26 | 52 | 90.4 | 0.821 | 85.7 | 0.749 | 79.8 | 0.639 |
图3
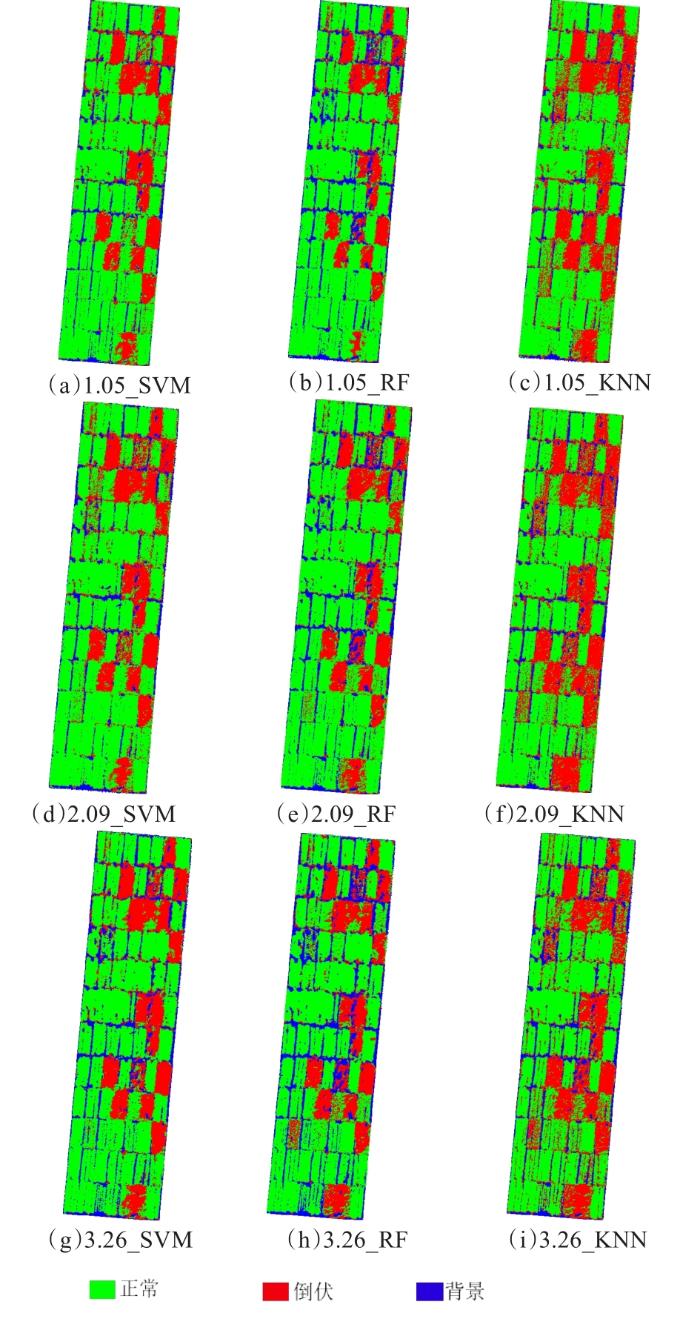
图3
不同空间分辨率影像全特征集的小麦倒伏分类图
Fig. 3
Wheat lodging classification map with full feature set of different spatial resolution images
3.2 基于ReliefF算法的特征选择倒伏分类
利用ReliefF特征选择算法分别对3种不同飞行场景下的全特征集52个特征变量进行筛选,设置阈值0.02,选择权重大于0.02的特征变量作为ReliefF特征子集(图4),分辨率分别为1.05、2.09、3.26 cm时,入选变量分别为12、8、6个。如表4所示,从1.05到3.26 cm变化区间内,SVM、RF和KNN总体分类精度变化范围别为89.8%~91.6%、83.5%~85.2%和78.2%~83.4%,其中SVM和RF的分类效果随飞行高度的增加而呈下降趋势。进一步考查在1.05较2.09 cm、1.05较3.26 cm和2.09较3.26 cm的空间分辨率间总体分类精度的相对差异,SVM分别降低1.21%、2.00%和0.78%,RF分别降低0%、2.04%和2.04%,KNN分别降低2.33%、6.65%和4.22%。由此可见,在3种不同飞行场景下,SVM分类器分类精度显著高于RF和KNN,泛化能力强。利用ReliefF算法对不同空间分辨率特征集进行筛选,特征集个数减少,在空间分辨率为1.05 cm时,SVM模型的分类效果最优,OA达到91.6%,Kappa系数达到0.867。
图4
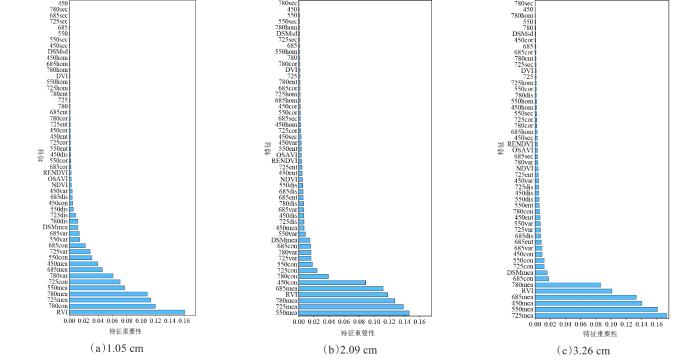
图4
基于ReliefF的不同空间分辨率特征集优化结果
Fig.4
Optimization results of different spatial resolution feature sets based on ReliefF
表4 基于ReliefF算法的小麦倒伏分类精度
Table 4
| 分辨率/cm | 特征数量 | SVM | RF | KNN | |||
|---|---|---|---|---|---|---|---|
| OA/% | Kappa | OA/% | Kappa | OA/% | Kappa | ||
| 1.05 | 12 | 91.6 | 0.867 | 85.2 | 0.738 | 83.4 | 0.697 |
| 2.09 | 8 | 90.5 | 0.822 | 85.2 | 0.738 | 81.5 | 0.662 |
| 3.26 | 6 | 89.8 | 0.819 | 83.5 | 0.699 | 78.2 | 0.609 |
3.3 基于RF-RFE算法的特征选择倒伏分类
在3个飞行高度场景下,利用RF-RFE算法对每个特征重要性进行定量评估,按重要性降序引入变量,确定分类精度。空间分辨率分别为1.05、2.09、3.26 cm时,入选变量个数分别为11、6、6,特征选择结果见图5。从1.05到3.26 cm变化区间内,SVM、RF和KNN总体分类精度变化范围别为90.3%~92.0%、84.3%~86.0%和78.9%~82.8%(表5)。进一步考查在1.05较2.09 cm、1.05较3.26 cm和2.09较3.26 cm间总体分类精度的相对差异,SVM分别降低0.767%、1.88%和1.11%,RF分别降低-0.116%、1.90%和2.02%,KNN分别降低2.86%、4.94%和2.03%。可见,在3种不同飞行场景下,SVM分类器分类精度高于RF和KNN,且相对稳定,当空间分辨率为1.05 cm时,SVM模型的分类效果最优,OA达到92.0%,Kappa系数达到0.854。
图5
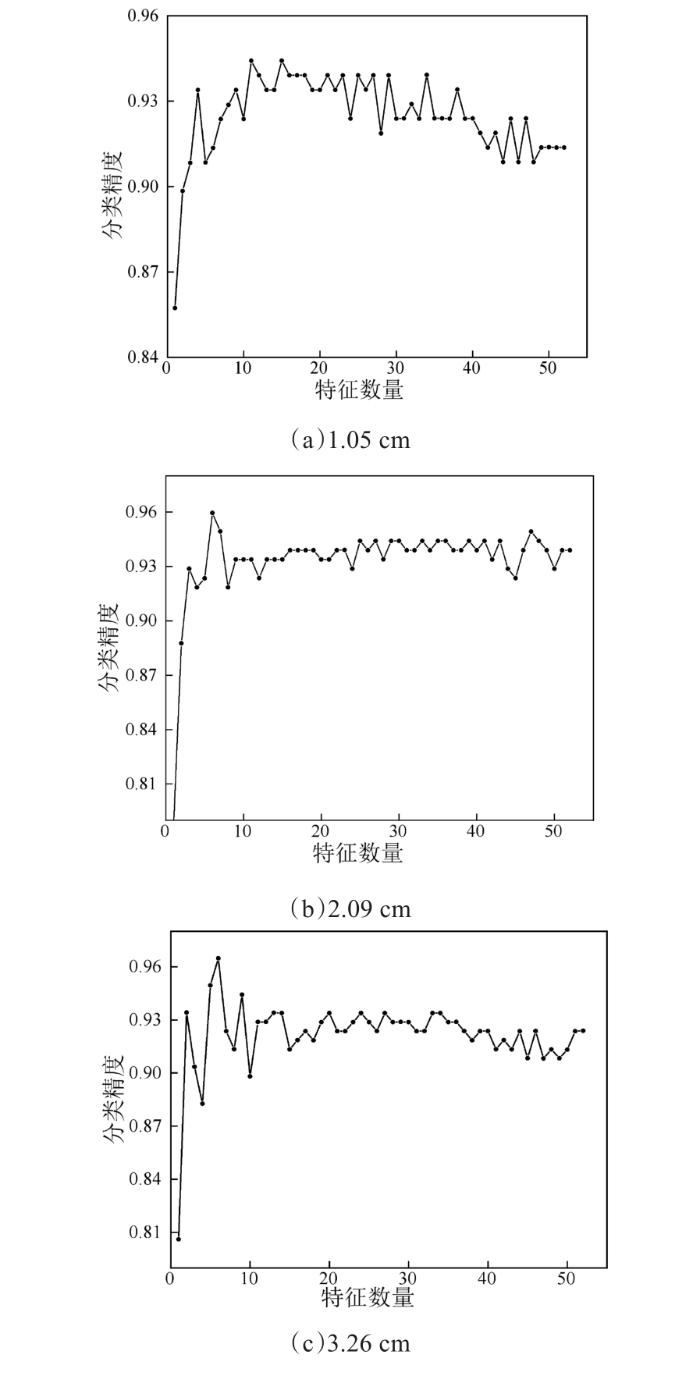
图5
基于RF-RFE的不同空间分辨率特征集优化结果
Fig.5
Optimization results of different spatial resolution feature sets based on RF-RFE
表5 基于RF-RFE算法的小麦倒伏分类精度
Table 5
| 分辨率/cm | 特征数量 | SVM | RF | KNN | |||
|---|---|---|---|---|---|---|---|
| OA/% | Kappa | OA/% | Kappa | OA/% | Kappa | ||
| 1.05 | 11 | 92.0 | 0.854 | 85.9 | 0.741 | 82.8 | 0.681 |
| 2.09 | 6 | 91.3 | 0.839 | 86.0 | 0.745 | 80.5 | 0.644 |
| 3.26 | 6 | 90.3 | 0.839 | 84.3 | 0.728 | 78.9 | 0.616 |
3.4 基于Boruta-Shap算法的特征选择倒伏分类
利用Boruta-Shap算法对全特征集进行特征子集筛选,当特征变量重要性得分高于阴影特征时,特征标注为绿色,其被定义为重要变量参与模型构建。空间分辨率为1.05、2.09、3.26 cm时,入选变量个数分别为39、43、35,特征选择结果见图6。在分辨率1.05~3.26 cm范围间,SVM、RF 和KNN总体分类精度变化范围分别为93.9%~95.6%、85.8%~90.7%和81.3%~84.7%,整体分类效果随飞行高度增加呈下降趋势(表6)。进一步考查在1.05较2.09 cm、1.05较3.26 cm、2.09较3.26 cm的飞行高度间总体分类精度的相对差异,SVM分别降低1.06%、1.81%和0.75%,RF分别降低3.66%、5.71%和1.98%,KNN分别降低1.68%、4.18%和2.46%。可见,在3种不同飞行场景下,SVM和RF在不同高度间的差异较小,表现相对稳定。当空间分辨率为1.05 cm时,SVM模型的分类效果最优,OA达到95.6%,Kappa系数达到0.914。
图6
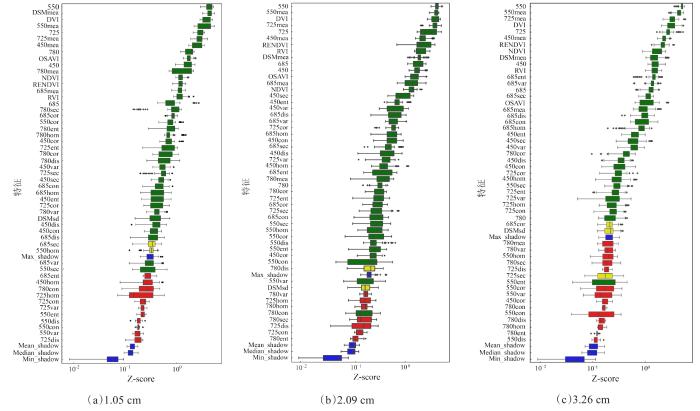
图6
基于Boruta-Shap的不同空间分辨率特征集优化结果
Fig.6
Optimization results of different spatial resolution feature sets based on Boruta-Shap
表6 基于Boruta-Shap算法的小麦倒伏分类精度
Table 6
| 分辨率/cm | 特征数量 | SVM | RF | KNN | |||
|---|---|---|---|---|---|---|---|
| OA/% | Kappa | OA/% | Kappa | OA/% | Kappa | ||
| 1.05 | 39 | 95.6 | 0.914 | 90.7 | 0.827 | 84.7 | 0.717 |
| 2.09 | 43 | 94.6 | 0.894 | 87.5 | 0.774 | 83.3 | 0.701 |
| 3.26 | 35 | 93.9 | 0.885 | 85.8 | 0.75 | 81.3 | 0.665 |
3.5 倒伏分类模型的适应性分析
考虑到倒伏发生后具有生长恢复效应,对倒伏后12天的无人机多光谱分辨率影像采用相同的处理方法,进行分类结果的比较验证,结果如表7所示。在分辨率1.05~3.26 cm范围间,SVM、RF和KNN总体分类精度变化范围分别为81.9%~87.5%、74.4%~79.9%和86.2%~90.4%,SVM的分类效果基本上优于RF和KNN分类器,其中全特征集的分类精度最高,但对高度特征比较敏感,变化范围大,Boruta-Shap特征子集对高度特征不敏感,模型更加稳健,且保持较高分类精度。对于不同分辨率遥感影像,最佳的空间分辨率为1.05 cm,随着空间分辨率的降低,分类精度整体呈下降趋势。从图7可以看出,基于不同的特征集,倒伏后不久(5月5日)收集到的无人机多光谱影像相较于持续一段时期(5月17日)的影像,产生更高的分类精度,表明倒伏早期阶段有更好的颜色对比,倒伏一段时间后茎秆会部分直立恢复生长,导致自然颜色损失及纹理结构趋近使得分类精度降低。
表7 不同倒伏分类模型的比较验证
Table 7
| 特征选择方法 | 分辨率/cm | 特征数量 | SVM | RF | KNN | |||
|---|---|---|---|---|---|---|---|---|
| OA/% | Kappa | OA/% | Kappa | OA/% | Kappa | |||
| 全特征集 | 1.05 | 52 | 87.5 | 0.753 | 85.2 | 0.731 | 80.6 | 0.644 |
| 2.09 | 52 | 84.2 | 0.712 | 80.2 | 0.638 | 77.4 | 0.582 | |
| 3.26 | 52 | 81.9 | 0.664 | 79.1 | 0.625 | 76.8 | 0.578 | |
| ReliefF算法 | 1.05 | 14 | 79.9 | 0.604 | 78.9 | 0.598 | 79.2 | 0.604 |
| 2.09 | 9 | 75.6 | 0.538 | 74.2 | 0.527 | 75.6 | 0.538 | |
| 3.26 | 6 | 74.4 | 0.531 | 75.3 | 0.525 | 73.2 | 0.502 | |
| RF-RFE算法 | 1.05 | 11 | 85.7 | 0.724 | 83.9 | 0.710 | 77.9 | 0.592 |
| 2.09 | 13 | 84.1 | 0.702 | 82.6 | 0.682 | 81.4 | 0.651 | |
| 3.26 | 6 | 82.7 | 0.686 | 80.3 | 0.642 | 77.0 | 0.577 | |
| Boruta-Shap算法 | 1.05 | 35 | 90.4 | 0.823 | 88.9 | 0.769 | 79.2 | 0.631 |
| 2.09 | 39 | 88.6 | 0.765 | 85.3 | 0.732 | 77.8 | 0.586 | |
| 3.26 | 36 | 86.2 | 0.741 | 84.1 | 0.702 | 74.8 | 0.539 | |
图7
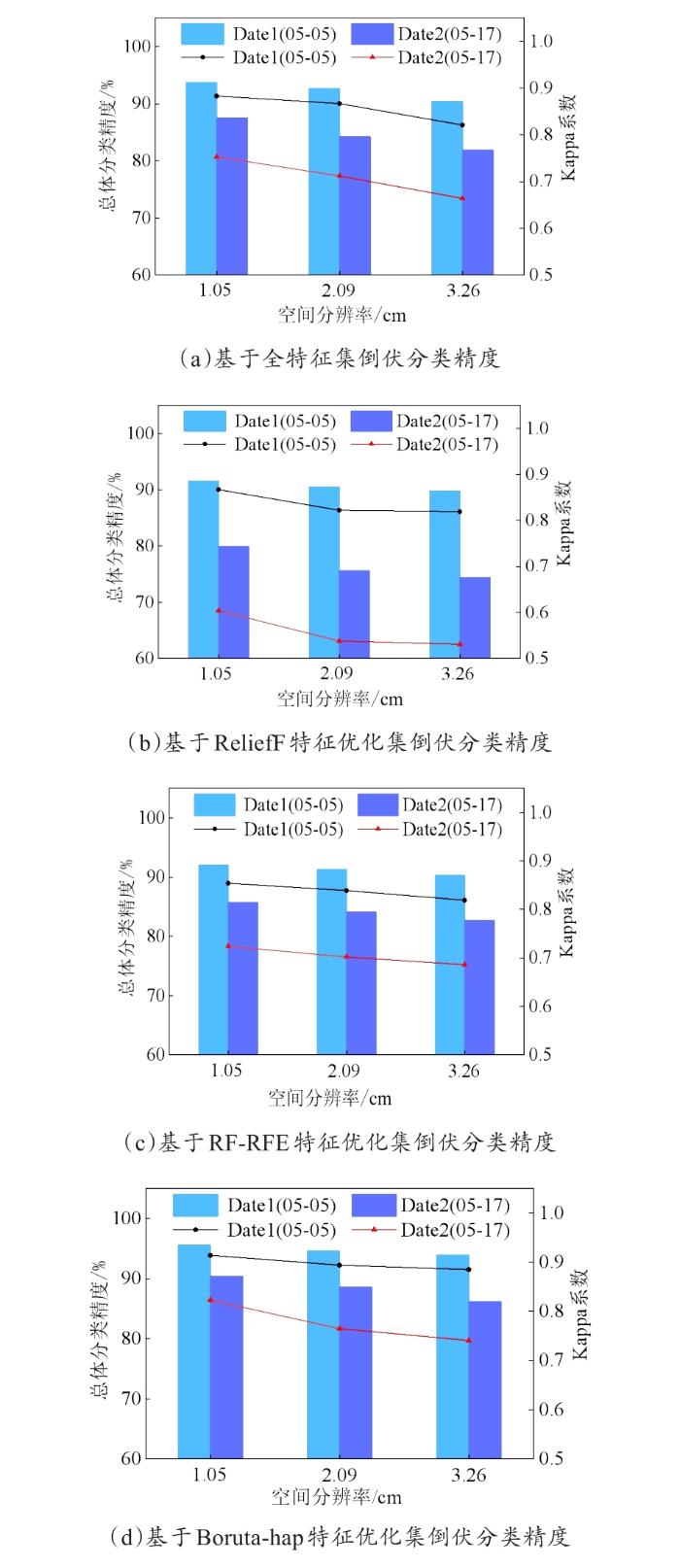
图7
不同飞行日期间各特征集倒伏分类结果比较
Fig. 7
Comparison of lodging classification results of each feature set during flight dates
4 讨论与结论
4.1 讨论
无人机影像空间分辨率的高低取决于飞行高度,直接影响监测效率和精度,所以在建立作物倒伏区域分类模型时,须考虑遥感影像分辨率对模型稳定性的影响。本研究结果显示,在监测范围不变的情况下,无人机飞行高度90 m获取的数据所用时间约为30 m的1/6,照片数量由62张减少到6张,说明高度的增加可以大幅度提高小麦倒伏区域识别效率。
本试验通过利用多分类特征,探究不同空间分辨率遥感影像对小麦倒伏区域分类结果的影响,通过设置3种不同的飞行场景(空间分辨率1.05、2.09和3.26 cm),结果表明1.05 cm空间分辨率是小麦倒伏区域识别的最佳分辨率,当影像空间分辨率降低时,整体分类效果逐渐变差,定位精度降低,导致分类结果空间一致性变差。然而,高空间分辨率的获取需要较低的飞行高度,这会降低监测效率。因此,在无人机遥感监测小麦倒伏时,不能单纯追求高空间分辨率,而要综合考虑飞行成本、影像获取及处理效率、分类精度等因素,根据具体需求寻求平衡点,既保证监测精度,又提高整体监测效率。
特征选择是重要的数据预处理技术,可显著提升机器学习算法的性能,增强模型的稳定性和适用性[20]。相较于其他特征优化方法,Boruta-Shap算法只包含相关特征而不影响模型性能来减少特征的数量,在Boruta算法中添加Shap值可增强重要的解释能力,减少数据过度拟合问题,目前该算法被广泛应用于不同领域,在特征集优化和提升模型精度方面均具有优良表现[21, 22]。不同的特征选择方法其筛选参数变量的标准不同,针对不同目标物属性,其结果存在较大差异,即使在相同数据集条件下,不同特征选择方法对模型的提升性能各不相同[23, 24]。本研究使用全特征集、ReliefF特征子集、RF-RFE特征子集和Boruta-Shap特征子集进行分类精度比较,发现Boruta-Shap特征选择方法在兼顾较高分类精度的基础上,可以降低数据维度,提高运算速率,在3种空间分辨率条件下(1.05、2.09和3.26 cm),总体分类精度分别为95.6%、94.6%和93.9%,表现最佳。
此外,特征选择的稳定性也是需要考虑的重要因素,稳定性高有利于筛选相关变量,提高特征可信度、模型稳健性和高性能,还可以增强模型的解释性[25, 26]。本研究比较了不同特征集,发现基于面向对象的SVM分类器与Boruta-Shap特征优化算法在多飞行高度遥感影像的倒伏区域识别中展示出较强的应用推广优势,且在1.05较2.09 cm、1.05较3.26 cm、2.09较3.26 cm的空间分辨率间总体分类精度的相对差异分别为1.06%、1.81%和0.75%,精度指标差异较小,表明模型在不同飞行高度间均具有较强的适应性。因此,选择适宜的特征选择方法,既能实现高精度的作物倒伏区域识别,又能降低影像空间分辨率对模型稳定性的影响,从而有助于提高飞行高度,扩大监测范围,提高无人机作业效率,降低飞行成本。
本试验基于低空无人机搭载多光谱传感器,通过设置3种飞行高度(30、60、90 m),使用3种面向对象分类方法(SVM、RF和KNN)训练不同空间分辨率影像全特征集、特征子集(ReliefF、RF-RFE和Boruta-Shap)。当倒伏发生在灌浆前期,倒伏小麦经过一段时间还能够自动恢复直立生长,这导致倒伏后不同时期的冠层结构有所变化,使得无人机影像获得的纹理特征不尽相同。倒伏早期的冠层光谱变化主要取决于茎秆和叶片的状态,而随着时间的推移,倒伏的光谱特性逐渐由穗决定,这就导致不同时间段遥感监测分析方法和倒伏精度的差异性[27, 28]。本研究的倒伏监测策略及方法是利用倒伏发生3天时影像数据确立的,为检验该倒伏分类模型的稳定性及适用性,进一步利用倒伏发生12天时的无人机影像数据进行验证,结果显示倒伏分类精度尽管有所降低,但依然能够很好地识别倒伏区域,为准确监测倒伏面积提供技术参考及时期选择。当然,在实际生产中,倒伏监测应尽早进行,不仅监测区域及面积更精确,而且有利于灾后补救措施的及时制定,加快植株恢复性生长,最大限度减少倒伏的不利影响。
4.2 结论
本研究综合考虑无人机飞行高度、特征选择、分类器方法及飞行日期对小麦倒伏分类精度的影响,比较了不同分辨率遥感影像对分类器及特征选择方法的影响,并从分类精度、鲁棒性和整体效率角度系统考查无人机监测小麦倒伏的分类结果。比较而言,SVM的分类精度高且模型广泛性好,优于RF和KNN,且Boruta-Shap优化特征集表现最优,在保证较高精度的前提下,降低了数据维度,提高数据处理效率。当Boruta-Shap与SVM相结合,能显著提高分类精度,有效增强数据稳定性,缩小不同飞行高度间的分类精度差异,扩展无人机飞行高度和监测时期的选择范围,根据具体需求及实际情况综合考虑,寻找分类精度和效率间的平衡点,为实际生产应用选择适宜的飞行高度以及对应的影像分辨率提供信息参考。
本试验内容只针对小范围品种种植区域进行倒伏分类研究,今后应采集更大范围倒伏区域进一步验证,并对不同时期及区域倒伏模型的可迁移性进行可行性分析,进一步细致划分小麦倒伏等级,以全面评价倒伏胁迫对小麦生长及产量的影响,为灾情评估和减灾补救措施制定提供多种可行性方案和技术支持。
利益冲突声明
本研究不存在研究者以及与公开研究成果有关的利益冲突。
参考文献
Lodging-related morphological traits of hybrid rice in a tropical irrigated ecosystem
[J].
A calibrated model of wheat lodging compared with field measurements
[J].
Remote sensing-based crop lodging assessment: Current status and perspectives
[J].
基于Worldview-2影像的玉米倒伏面积估算
[J].
Estimation of maize lodging area based on Worldview-2 image
[J].
中国无人机遥感技术突破与产业发展综述
[J].
The impact of UAV remote sensing technology on the industrial development of China: A review
[J].
Assessing rice lodging using UAV visible and multispectral image
[J].
无人机可见光遥感和特征融合的小麦倒伏面积提取
[J].
Wheat lodging area extraction using UAV visible light remote sensing and feature fusion
[J].
Monitoring maize lodging grades via unmanned aerial vehicle multispectral image
[J].
基于无人机图像以及不同机器学习和深度学习模型的小麦倒伏率检测
[J].
Wheat lodging ratio detection based on UAS imagery coupled with different machine learning and deep learning algorithms
[J].
基于无人机多光谱影像的冬小麦倒伏提取适宜空间分辨率研究
[J].
Study on the suitable resolution of winter wheat lodging extraction based on UAV multispectral image
[J].
Wheat lodging extraction using Improved_Unet network
[J].
An introduction to variable and feature selection
[J].
Discriminant analysis for lodging severity classification in wheat using RADARSAT-2 and Sentinel-1 data
[J].
Diagnostic mapping of canopy nitrogen content in rice based on hyperspectral measurements
[J].
Remote sensing leaf chlorophyll content using a visible band index
[J].
A review of remote sensing methods for biomass feedstock production
[J].
Extraction of texture features using GLCM and shape features using connected regions
[J].
基于无人机RGB影像的玉米种植信息高精度提取方法
[J].
High-precision extraction method for maize planting information based on UAV RGB images
[J].
Identifying relevant hyperspectral bands using Boruta: A temporal analysis of water hyacinth biocontrol
[J].
Integrating Navier-Stokes equation and neoteric iForest-BorutaShap-Facebook's prophet framework for stock market prediction: An application in Indian context
[J].
特征选择稳定性方法研究
[J].
Research on methods for feature selection stability
[J].
机器学习中的特征选择方法研究及展望
[J].
The key techniques and future vision of feature selection in machine learning
[J].
基于偏最小二乘回归的鲁棒性特征选择与分类算法
[J].
Robust feature selection and classification algorithm based on partial least squares regression
[J].
特征选择稳定性研究综述
[J].
Survey on stability of feature selection
[J].
基于多特征优选的无人机可见光遥感林分类型分类
[J].
Classification of forest stand based on multi-feature optimization of UAV visible light remote sensing
[J].
小麦倒伏的光谱特征及遥感监测
[J].
The canopy spectral features and remote sensing of wheat lodging
[J].
小麦倒伏信息无人机多时相遥感提取方法
[J].
Extraction method of wheat lodging information based on multi-temporal UAV remote sensing data
[J].






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}