Smart Agriculture ›› 2023, Vol. 5 ›› Issue (4): 16-32.doi: 10.12133/j.smartag.SA202308006
• 专题--面向智慧农业的人工智能和机器人技术 • 上一篇 下一篇
陈睿韵1( ), 田文斌1(), 鲍海波1, 李端2, 谢鑫浩3, 郑永军1, 谭彧1
), 田文斌1(), 鲍海波1, 李端2, 谢鑫浩3, 郑永军1, 谭彧1
收稿日期:2023-07-31
出版日期:2023-12-30
基金项目:作者简介:通信作者:
CHEN Ruiyun1(), TIAN Wenbin1(), BAO Haibo1, LI Duan2, XIE Xinhao3, ZHENG Yongjun1, TAN Yu1
Received:2023-07-31
Online:2023-12-30
Foundation items:National Natural Science Foundation of China(32171901)
About author:CHEN Ruiyun, E-mail: Chenruiyun2020@126.com
Corresponding author:摘要:
[目的/意义]作为未来农机装备的研究重点,农业轮式机器人正向着智能化与多功能化的方向发展。三维环境感知技术因其获取的信息量丰富、复杂环境下的鲁棒性和适应性好,成为了农业轮式机器人智能化无人作业的基础与关键,其发展水平直接影响到包括农业轮式机器人在内的无人农机的作业质量与效率。[进展]本文首先总结了农业轮式机器人和农业环境感知技术的发展现状,分析了不同类型农业轮式机器人的使用特点和应用现状。其次分析了在农业轮式机器人上实现三维环境感知所主要使用的感知设备及其对应的关键技术,重点阐述了基于激光雷达、视觉传感器和多传感器融合的农业轮式机器人三维环境感知技术的研究进展。[结论/展望]结合农业作业特点与实际需求,指出了农业轮式机器人三维环境感知技术在适用性、环境信息处理和感知效果等方面存在的一些问题,并提出了提升传感器的农业适用性、发展基于深度学习的农业环境感知技术、发展智能化的高速在线多传感器信息融合技术三个方面的建议,以期为农业轮式机器人三维环境感知技术发展提供参考与借鉴。
陈睿韵, 田文斌, 鲍海波, 李端, 谢鑫浩, 郑永军, 谭彧. 农业轮式机器人三维环境感知技术研究进展[J]. 智慧农业(中英文), 2023, 5(4): 16-32.
CHEN Ruiyun, TIAN Wenbin, BAO Haibo, LI Duan, XIE Xinhao, ZHENG Yongjun, TAN Yu. Three-Dimensional Environment Perception Technology for Agricultural Wheeled Robots: A Review[J]. Smart Agriculture, 2023, 5(4): 16-32.
表1
主要农业轮式机器人分类及功能简介
| 应用场景 | 名称 | 功能简介 |
|---|---|---|
| 田间生产轮式机器人 | 播种机器人 | 依托轮式移动机构行进,利用播种机构进行播种作业 |
| 田间管理机器人 | 利用传感系统和智能控制系统等,完成喷药和追肥等田间生产管理作业 | |
| 大田收获机器人 | 用于大田作物的智能收获 | |
| 果园生产轮式机器人 | 除草机器人 | 通过环境感知和自主导航系统等完成果园作物间除草工作 |
| 植保机器人 | 根据作物病虫害情况进行对靶喷药等智能植保作业 | |
| 收获采摘机器人 | 识别并定位成熟果实,并利用执行机构进行果实采摘 | |
| 设施农业轮式机器人 | 育苗机器人 | 根据作物种苗的生长情况实现智能移栽等功能 |
| 作物巡检机器人 | 依托轮式移动机构行进,实时巡检作物生长状况 | |
| 畜牧养殖轮式机器人 | 饲喂机器人 | 用于畜禽的饲料投喂,使用轮式移动机构自主行进并投喂饲料 |
| 养殖巡检机器人 | 实时巡检养殖场的环境状况和畜禽的养殖状况 | |
| 水产养殖轮式机器人 | 投饵机器人 | 用于部分场景下的水产品饵料投喂 |
表2
轮式机器人在农业领域的使用特点
| 类别 | 优点 | 缺点 | 说明 |
|---|---|---|---|
| 单轮滚动机器人 | 1)地压较小,土壤压实和损伤植物的风险较小 2)结构轻便紧凑 | 1)承载能力弱 2)控制较为复杂 3)具有静态不稳定性 | 在农业领域较少应用 |
| 两轮移动机器人 | 1)可在狭窄空间内移动 2)结构轻便紧凑 | 1)稳定性和平衡性较差 2)承载能力较弱 3)控制和操控较为复杂 4)对不同地形的适应能力较弱 | 在农业领域较少应用 |
| 三轮及四轮移动机器人、多轮移动机器人 | 1)承载能力强 2)控制相对简单 3)稳定性和平衡性较好 4)对不同地形的适应能力较强 5)可搭载多种类型的传感器和设备,适用范围广 | 1)生产和维护成本较单轮与两轮移动机器人更高 2)机动性不如单轮与两轮移动机器人 3)地压较大,压实土壤损伤植物的风险较大 | 1)对不同工作场景的适应性强 2)鲁棒性和稳定性较好 3)具备长时间运行的能力 |

图1
概念无人驾驶拖拉机[16]


图2
轮式番茄采摘机器人[5]
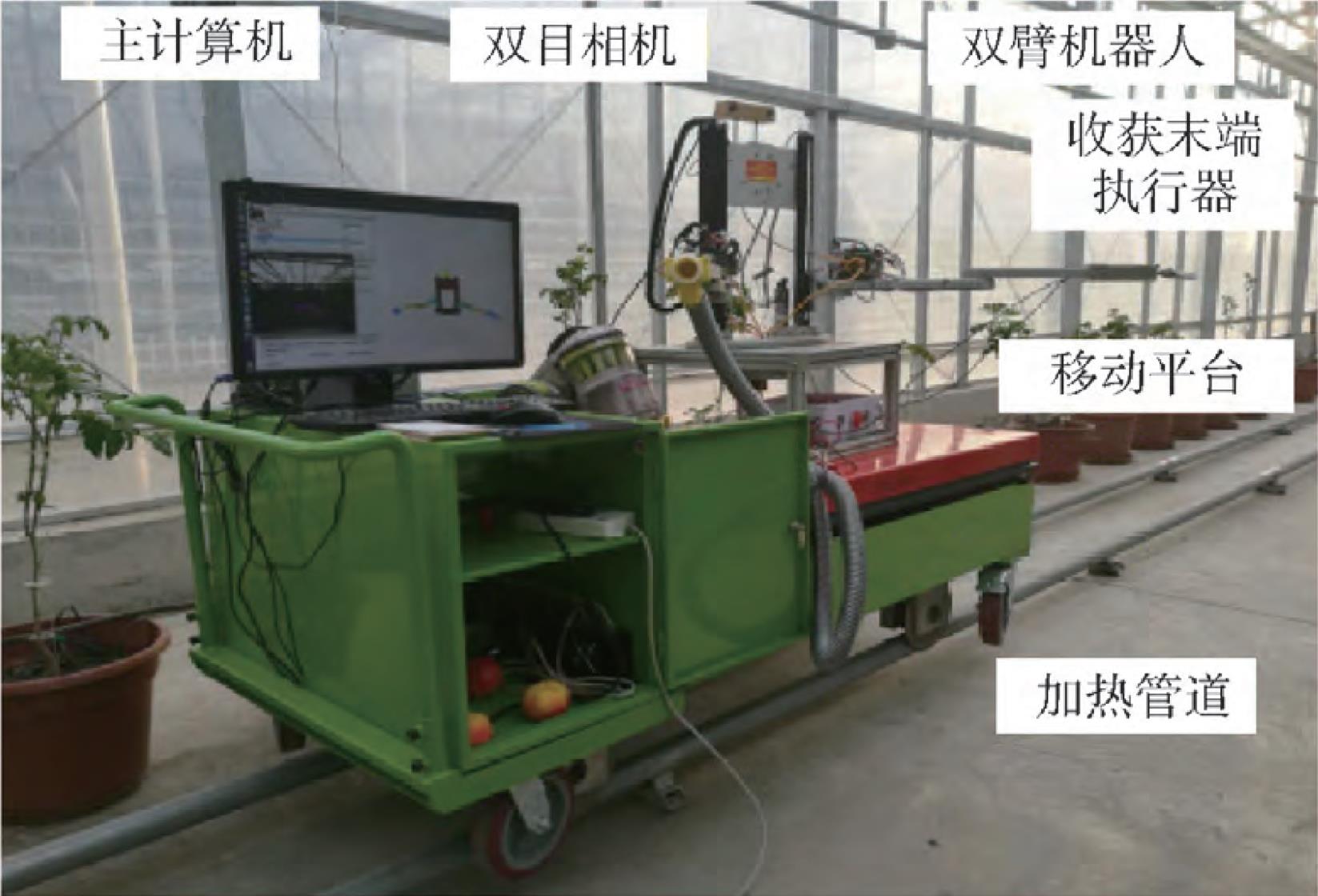
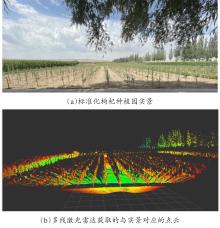
图3
多线激光雷达田间工作效果
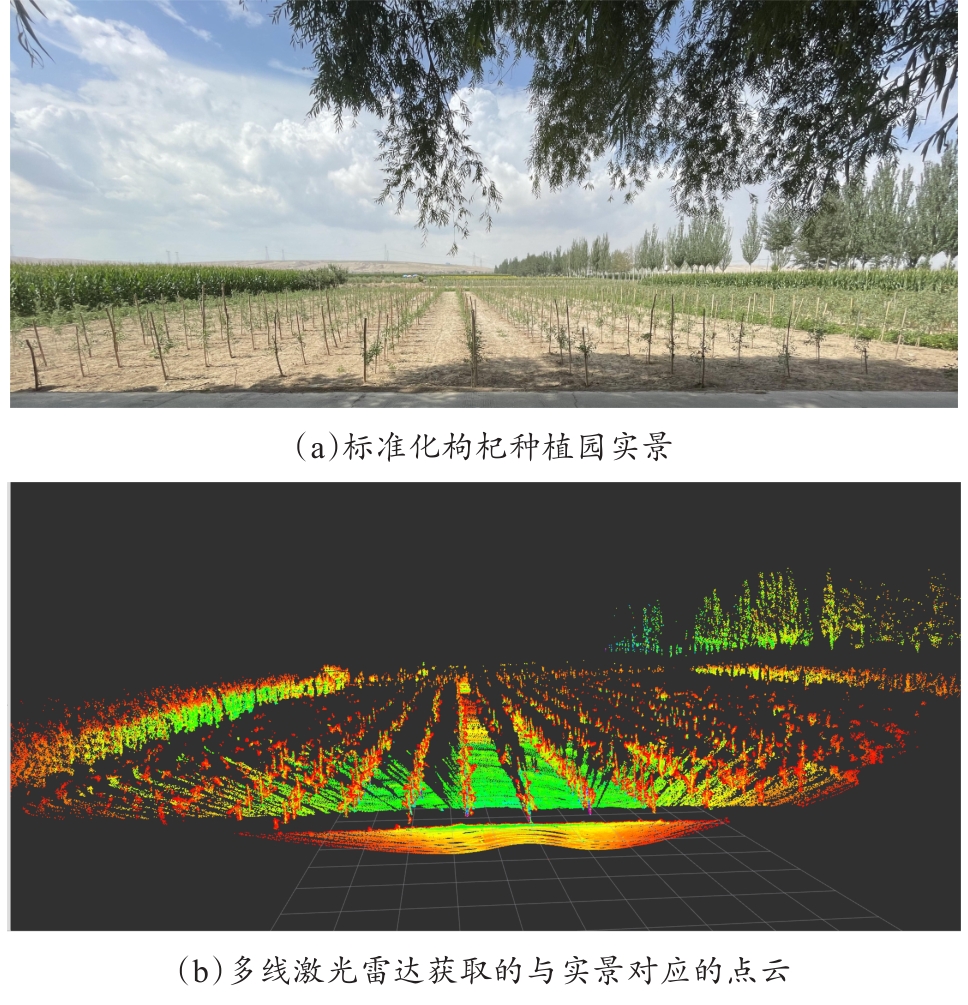
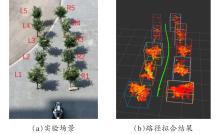
图4
实验场景和路径拟合结果[49]
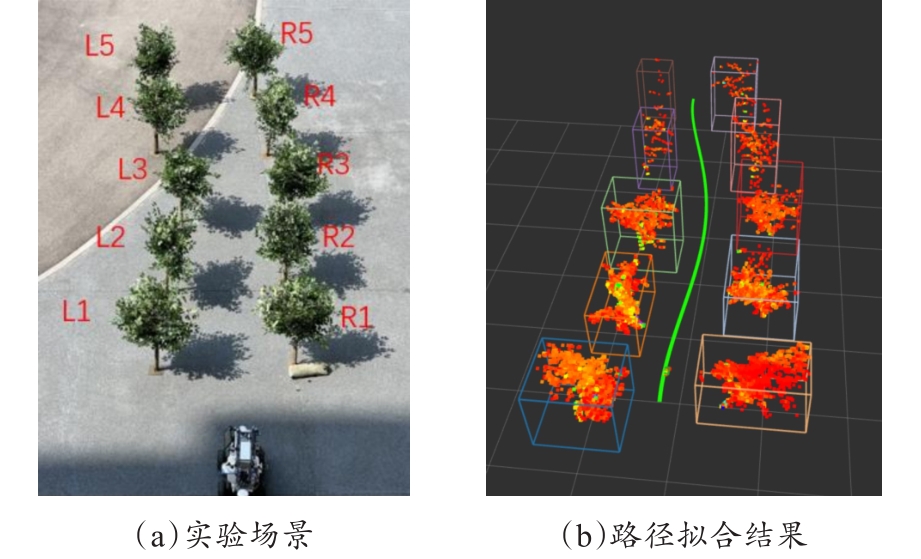
图5
田间草堆和田埂的检测效果图[53]
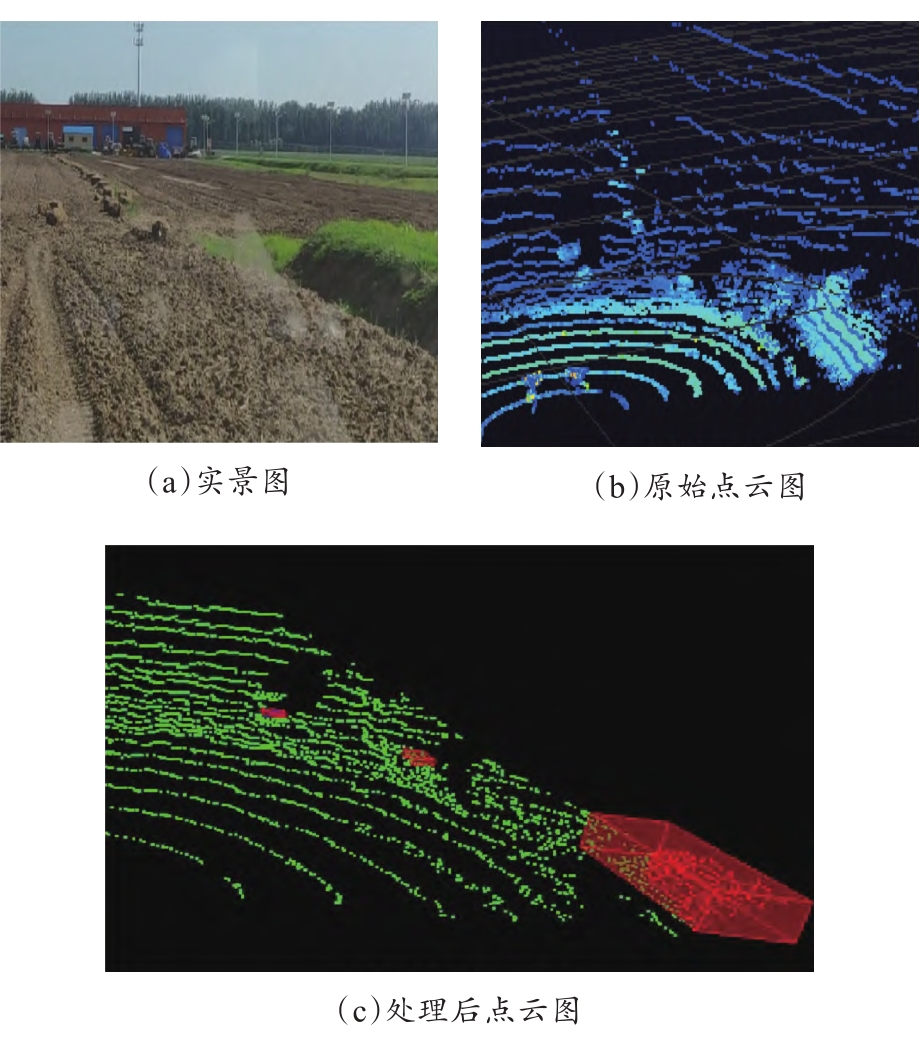

图6
障碍物检测原始图像和视差图[70]

图7
番茄串识别及对应三维点云效果图[74]
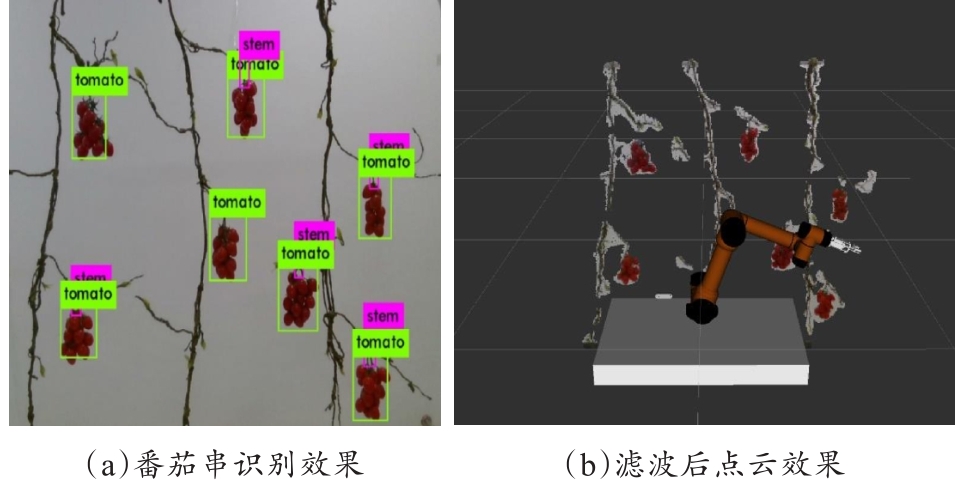
表3
单一传感器三维环境感知方案的优缺点
| 传感器方案 | 优点 | 缺点 |
|---|---|---|
| 激光雷达感知 | 1)对严苛环境(黑暗、目标重叠等)适应较好 2)探测距离远 3)精度高且分辨率好 | 1)相对较为昂贵 2)受雨、雪等恶劣天气影响 3)无法获得目标形状和颜色信息 4)多个激光雷达间可能相互干扰 |
| 视觉传感器感知 | 1)不对外发射信号,相互之间不会干扰 2)不扫描时能获得更宽视角的三维信息 3)经济性相对更好 4)获得的图像包含更丰富的信息 | 1)受环境光照和灰尘等影响较大,夜间无法工作 2)相应算法鲁棒性不足 3)有效工作距离较短 |
表4
基于多传感器融合的三维环境感知技术相关研究
| 作者 | 传感器方案 | 特点和效果 |
|---|---|---|
| Underwood等[ | 单线激光雷达、全景相机 | 将激光雷达扫描系统获取的三维点云投影至图像中,通过建立的3D模型估计果树冠层体积,进而预测单株产量 |
| Reina等[ | 多线激光雷达、双目相机、毫米波雷达 | 提出了一个立体相机与多线激光雷达的统计框架和一种立体相机与毫米波雷达融合方法用于障碍物检测,其中前者的检测准确率达到96.5% |
| Yasukawa等[ | 深度相机、红外摄像机 | 基于红外摄像机和深度相机设计了一个番茄采摘机器人,前者用于检测番茄的果实,后者用于确定番茄的三维位置,检测正确率达到88.1% |
| Benet等[ | 单线激光雷达、工业相机、IMU | 融合工业相机、单线激光雷达和IMU的数据进行果树行识别与直线拟合,当机器人以2 m/s的速度自动跟踪果行时平均横向误差在0.1~0.4 m之间 |
| Yan等[ | 双目相机、深度相机、IMU | 将以双目相机和IMU为基础的视觉惯性里程计与深度相机进行融合,完成温室环境中的实时定位并建立三维地图 |
| 褚福春[ | 多线激光雷达、IMU | 通过IMU提升激光雷达的定位精度,采集果园三维点云数据拟合出果树行直线,进而得到导航路径实现自主导航,0.8和1.0 m/s的速度下拟合的导航路径平均横向偏差分别为0.084和0.108 m |
| 刘宇峰[ | 单线激光雷达、双目相机 | 单线激光雷达与双目相机分别获取障碍物定位数据与尺寸测量数据,进而实现自主导航农机单/多障碍物避障,最终平均测量误差为0.03 m、平均定位误差小于0.04 m |
| 何蒙[ | 单线激光雷达、深度相机 | 在单线激光雷达获取周围环境点云数据的基础上使用深度相机剔除无效点,根据剩余目标位置实现棚架果园的导航。以0.3 m/s的速度行进时平均横向偏差在0.027 3~0.031 4 cm之间 |
| 林乙蘅[ | 多线激光雷达、双目相机、INS、BDS | 使用多传感器融合的方法检测道路两侧果树及障碍物信息,构建环境三维点云图,完成路径规划与路径追踪,其中直线路径跟踪精度在0.02 m以下 |
| 1 |
中共中央 国务院. 关于做好2022年全面推进乡村振兴重点工作的意见[EB/OL]. (2022-02-22)[2023-07-29]
|
| 2 |
罗锡文, 廖娟, 胡炼, 等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报, 2021, 42(6): 8-17, 5.
|
|
|
|
| 3 |
李道亮, 李震. 无人农场系统分析与发展展望[J]. 农业机械学报, 2020, 51(7): 1-12.
|
|
|
|
| 4 |
欧阳安, 崔涛, 林立. 智能农机装备产业现状及发展建议[J]. 科技导报, 2022, 40(11): 55-66.
|
|
|
|
| 5 |
刘成良, 贡亮, 苑进, 等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报, 2022, 53(7): 1-22, 55.
|
|
|
|
| 6 |
|
| 7 |
陶永, 王田苗, 刘辉, 等. 智能机器人研究现状及发展趋势的思考与建议[J]. 高技术通讯, 2019, 29(2): 149-163.
|
|
|
|
| 8 |
谭民, 王硕. 机器人技术研究进展[J]. 自动化学报, 2013, 39(7): 963-972.
|
|
|
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
刘延斌. 自行车机器人研究综述[J]. 机械设计与研究, 2007, 23(5): 113-115.
|
|
|
|
| 15 |
|
| 16 |
IndustrialCNH. Newsroom[EB/OL]. [2023-08-29]
|
| 17 |
王儒敬, 孙丙宇. 农业机器人的发展现状及展望[J]. 中国科学院院刊, 2015, 30(6): 803-809.
|
|
|
|
| 18 |
林欢, 许林云. 中国农业机器人发展及应用现状[J]. 浙江农业学报, 2015, 27(5): 865-871.
|
|
|
|
| 19 |
王佳荣. 面向自动驾驶的多传感器三维环境感知系统关键技术研究[D]. 北京: 中国科学院大学, 2020.
|
|
|
|
| 20 |
王世峰, 戴祥, 徐宁, 等. 无人驾驶汽车环境感知技术综述[J]. 长春理工大学学报(自然科学版), 2017, 40(1): 1-6.
|
|
|
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
王宝梁, 沈文龙, 张宝玉. 农用无人车环境感知技术发展现状及趋势分析[J]. 中国农机化学报, 2021, 42(11): 214-221.
|
|
|
|
| 25 |
|
| 26 |
刘斌, 张军, 鲁敏, 等. 激光雷达应用技术研究进展[J]. 激光与红外, 2015, 45(2): 117-122.
|
|
|
|
| 27 |
|
| 28 |
陈晓冬, 张佳琛, 庞伟凇, 等. 智能驾驶车载激光雷达关键技术与应用算法[J]. 光电工程, 2019, 46(7): 34-46.
|
|
|
|
| 29 |
余莹洁. 车载激光雷达的主要技术分支及发展趋势[J]. 科研信息化技术与应用, 2018, 9(6): 16-24.
|
|
|
|
| 30 |
赵腾. 基于激光扫描的联合收割机自动导航方法研究[D]. 杨凌: 西北农林科技大学, 2017.
|
|
|
|
| 31 |
何勇, 蒋浩, 方慧, 等. 车辆智能障碍物检测方法及其农业应用研究进展[J]. 农业工程学报, 2018, 34(9): 21-32.
|
|
|
|
| 32 |
么汝亭. 林用移动机器人的环境感知与跟踪控制研究[D]. 北京: 北京林业大学, 2021.
|
|
|
|
| 33 |
孙意凡, 孙建桐, 赵然, 等. 果实采摘机器人设计与导航系统性能分析[J]. 农业机械学报, 2019, 50(S1): 8-14.
|
|
|
|
| 34 |
郭成洋. 果园智能车辆自动导航系统关键技术研究[D]. 杨凌: 西北农林科技大学, 2020.
|
|
|
|
| 35 |
|
| 36 |
|
| 37 |
朱云, 凌志刚, 张雨强. 机器视觉技术研究进展及展望[J]. 图学学报, 2020, 41(6): 871-890.
|
|
|
|
| 38 |
向学勤, 潘志庚, 童晶. 深度相机在计算机视觉与图形学上的应用研究(英文)[J]. 计算机科学与探索, 2011, 5(6): 481-492.
|
|
|
|
| 39 |
|
| 40 |
周星, 高志军. 立体视觉技术的应用与发展[J]. 工程图学学报, 2010, 31(4): 50-55.
|
|
|
|
| 41 |
陈舒雅. 基于深度学习的立体匹配技术研究[D]. 杭州: 浙江大学, 2022.
|
|
|
|
| 42 |
|
| 43 |
赵子健. 基于深度相机的图像处理研究[D]. 合肥: 中国科学技术大学, 2022.
|
|
|
|
| 44 |
|
| 45 |
|
| 46 |
|
| 47 |
|
| 48 |
刘伟洪, 何雄奎, 刘亚佳, 等. 果园行间3D LiDAR导航方法[J]. 农业工程学报, 2021, 37(9): 165-174.
|
|
|
|
| 49 |
熊积奎. 基于激光雷达和卫星定位的果园喷雾机导航控制研究[D]. 镇江: 江苏大学, 2022.
|
|
|
|
| 50 |
耿丽杰. 基于激光雷达和RTK的葡萄园自主导航平台的研究与设计[D]. 淄博: 山东理工大学, 2022.
|
|
|
|
| 51 |
季宇寒, 徐弘祯, 张漫, 等. 基于激光雷达的农田环境点云采集系统设计[J]. 农业机械学报, 2019, 50(S1): 1-7.
|
|
|
|
| 52 |
|
| 53 |
尚业华, 张光强, 孟志军, 等. 基于欧氏聚类的三维激光点云田间障碍物检测方法[J]. 农业机械学报, 2022, 53(1): 23-32.
|
|
|
|
| 54 |
胡广锐, 孔微雨, 齐闯, 等. 果园环境下移动采摘机器人导航路径优化[J]. 农业工程学报, 2021, 37(9): 175-184.
|
|
|
|
| 55 |
|
| 56 |
|
| 57 |
|
| 58 |
张漫, 苗艳龙, 仇瑞承, 等. 基于车载三维激光雷达的玉米叶面积指数测量[J]. 农业机械学报, 2019, 50(6): 12-21.
|
|
|
|
| 59 |
|
| 60 |
|
| 61 |
|
| 62 |
王飞涛, 樊春春, 李兆东, 等. 机器人在设施农业领域应用现状及发展趋势分析[J]. 中国农机化学报, 2020, 41(3): 93-98, 120.
|
|
|
|
| 63 |
|
| 64 |
|
| 65 |
|
| 66 |
|
| 67 |
|
| 68 |
杨福增, 刘珊, 陈丽萍, 等. 基于立体视觉技术的多种农田障碍物检测方法[J]. 农业机械学报, 2012, 43(5): 168-172, 202.
|
|
|
|
| 69 |
姬长英, 沈子尧, 顾宝兴, 等. 基于点云图的农业导航中障碍物检测方法[J]. 农业工程学报, 2015, 31(7): 173-179.
|
|
|
|
| 70 |
徐俊杰. 基于视觉的丘陵山区田间道路场景理解和障碍物检测研究[D]. 重庆: 西南大学, 2019.
|
|
|
|
| 71 |
|
| 72 |
|
| 73 |
|
| 74 |
乐晓亮. 番茄串的机器人采收方法研究与应用[D]. 广州: 华南理工大学, 2021.
|
|
|
|
| 75 |
|
| 76 |
|
| 77 |
|
| 78 |
|
| 79 |
余越. 基于融合导航与强化学习算法的田间智能农机自主避障方法研究[D]. 杭州: 浙江大学, 2022.
|
|
|
|
| 80 |
何坤. 基于ROS的草莓温室自主移动机器人全局路径规划研究[D]. 武汉: 武汉轻工大学, 2020.
|
|
|
|
| 81 |
李洋, 赵鸣, 徐梦瑶, 等. 多源信息融合技术研究综述[J]. 智能计算机与应用, 2019, 9(5): 186-189.
|
|
|
|
| 82 |
许博玮, 马志勇, 李悦. 多传感器信息融合技术在环境感知中的研究进展及应用[J]. 计算机测量与控制, 2022, 30(9): 1-7, 21.
|
|
|
|
| 83 |
|
| 84 |
|
| 85 |
|
| 86 |
|
| 87 |
|
| 88 |
褚福春. 基于多传感器融合的农业机器人非结构化环境导航技术研究[D]. 淄博: 山东理工大学, 2022.
|
|
|
|
| 89 |
刘宇峰. 基于机器视觉的自主导航农机避障路径规划[D]. 南京: 南京农业大学, 2020.
|
|
|
|
| 90 |
何蒙. 2D-3D信息组合的棚架果园复杂场景自主感知与导航[D]. 镇江: 江苏大学, 2021.
|
|
|
|
| 91 |
林乙蘅. 基于多源信息融合的智能农机路径规划和路径跟踪研究[D]. 南京: 东南大学, 2018.
|
|
|
| [1] | 刘洋, 冀杰, 潘登, 赵立军, 李明生. 基于激光雷达与IMU融合的农业机器人定位方法[J]. 智慧农业(中英文), 2024, 6(3): 94-106. |
| [2] | 赵春江, 范贝贝, 李瑾, 冯青春. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15. |
| [3] | 刘理民, 何雄奎, 刘伟洪, 刘紫嫣, 韩虎, 李扬帆. 果园自主导航兼自动对靶喷雾机器人[J]. 智慧农业(中英文), 2022, 4(3): 63-74. |
| [4] | 冯涵, 张浩, 王梓, 江世界, 刘伟洪, 周凌卉, 王亚雄, 康峰, 刘星星, 郑永军. 基于激光点云的三维虚拟果园构建方法[J]. 智慧农业(中英文), 2022, 4(3): 12-23. |
| [5] | 张建, 谢田晋, 杨万能, 周广生. 近地遥感技术在大田作物株高测量中的研究现状与展望[J]. 智慧农业(中英文), 2021, 3(1): 1-15. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||







