Smart Agriculture ›› 2022, Vol. 4 ›› Issue (2): 135-149.doi: 10.12133/j.smartag.SA202202008
• Overview Article • Previous Articles Next Articles
HUANG Zichen1( ), SUGIYAMA Saki2
), SUGIYAMA Saki2
Received:2022-02-18
Online:2022-06-30
corresponding author:
HUANG Zichen, E-mail:huang.zichen.22c@kyoto-u.jp
CLC Number:
HUANG Zichen, SUGIYAMA Saki. Research Progress and Enlightenment of Japanese Harvesting Robot in Facility Agriculture[J]. Smart Agriculture, 2022, 4(2): 135-149.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202202008

Fig.1
The development history of Japanese agricultural robots
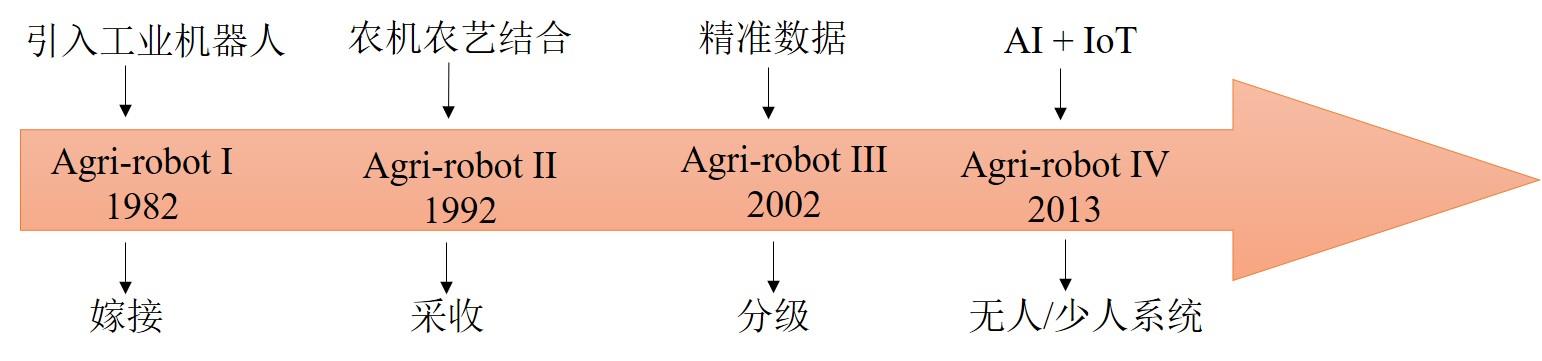
Table 1
Ranking of the total cultivated area of horticultural facilities in Japan in 2018
| 排名 | 果蔬 | 面积大小/km2 | 排名 | 果蔬 | 面积大小/km2 |
|---|---|---|---|---|---|
| 1 | 番茄 | 69,739 | 6 | 西瓜 | 18,951 |
| 2 | 菠菜 | 61,401 | 7 | 大葱 | 18,949 |
| 3 | 草莓 | 36,972 | 8 | 小番茄 | 16,161 |
| 4 | 黄瓜 | 33,425 | 9 | 芦笋 | 11,036 |
| 5 | 哈密瓜 | 29,194 | 10 | 茄子 | 10,875 |

Fig. 2
A typical tomato cultivation greenhouse with a rail system

Table 2
The end effector of three tomato harvesting robots
| 序号 | 名称 | 主要机构 |
|---|---|---|
| 1 | 气吸式末端执行机构 | 切除机构,吸取机构 |
| 2 | 剪切式末端执行机构 | 切除机构,夹取机构 |
| 3 | 旋转式末端执行机构 | 夹取机构,旋转机构 |

Fig. 3
Tomato harvesting robot produced by Panasonic


Fig. 4
Green pepper harvesting robot

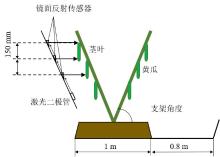
Fig. 5
Cucumber harvesting and recognition under slope cultivation mode
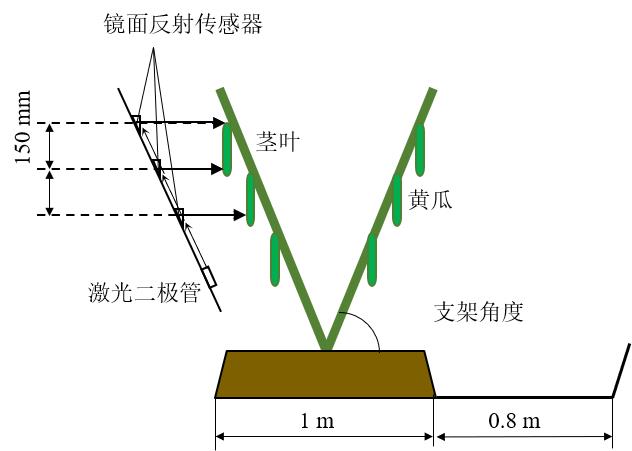

Fig. 6
Asparagus harvesting robot

Table 3
Comparison of the four generations of strawberry harvesting robots
| 采收机器人 | 种植模式 | 机械手采收方式 | 末端执行机构 | 优点 | 缺点 |
|---|---|---|---|---|---|
| 第一代[ | 高架 | 由下向上 | 气吸式 | 高采收成功率 | 无法识别未成熟草莓 |
| 第二代[ | 垄作 | 由上向下 | 气吸式 | 高采收成功率 | 误采相邻未成熟草莓 |
| 第三代[ | 高架 | 水平方向 | 剪切式 | 针对单个草莓采收、分级 | 体积大、笨重 |
| 第四代[ | 移动苗床 | 水平方向 | 剪切式 | 高密度、高效 | 体积大、笨重 |

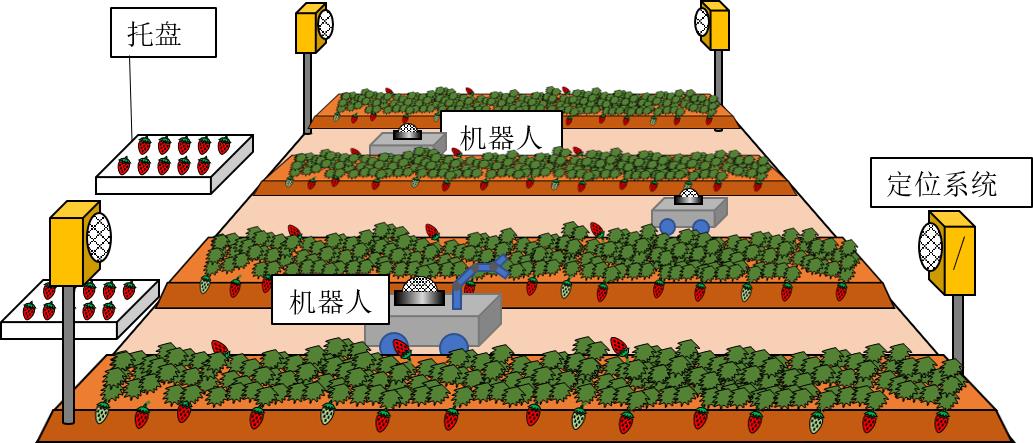
Fig.7
Conceptual diagram of distributed collaborative robot system
| 1 | 齐飞, 李恺, 李邵, 等. 世界设施园艺智能化装备发展对中国的启示研究[J]. 农业工程学报, 2019, 35(2): 183-195. |
| QI F, LI K, LI S, et al. Development of intelligent equipment for protected horticulture in world and enlightenment to China[J]. Transactions of the CSAE, 2019, 35(2): 183-195. | |
| 2 | 農業近代化資金: 農林水産省[EB/OL]. [2022-04-09]. . |
| 3 | 次世代型農業支援サービス[EB/OL]. [2022-04-09]. . |
| 4 | 農業経営に使える税制·融資·補助金について: 農林水産省[EB/OL]. [2022-04-09]. . |
| 5 | 産学官連携協議会. 農林水産省「知」の集積と活用の場[EB/OL]. [2022-04-09]. . |
| 6 | 農林水産省. 施設園芸[EB/OL]. [2022-02-08]. . |
| 7 | KONDO N. Robotics technologies supporting smart agriculture: Plenary speech[R]. Beijing, China: 6th IFAC Conference on Bio-Robotics, 2018. |
| 8 | 鳥居徹. 苗生産におけるロボット技術の現状[J]. 計測と制御, 1994, 33(10): 843-847. |
| 9 | 富田武彦,輪竹宏昭. 接ぎ木ロボット[J]. 計測と制御, 1998, 37(2): 99-100. |
| 10 | 川村登,並河清,藤浦建史, 等. 農業用ロボットの研究 (第1報)[J]. 農業機械学会誌, 1984, 46(3): 353-358. |
| 11 | KAWANO S, WATANABE H, IWAMOTO M. Determination of sugar content in intact peaches by near infrared spectroscopy with fiber optics in interactance mode.[J]. Engei Gakkai Zasshi, 1992, 61(2): 445-451. |
| 12 | SHIINA T, IJIRI T, MATSUDA I, et al. Determination of brix value and acidity in pineapple fruits by near infrared spectroscopy[J]. Acta Horticulturae, 1993(334): 261-272. |
| 13 | KUBOTA. Agri Robo MR 1000A[EB/OL]. [2022-02-08]. . |
| 14 | YANMAR. ヤンマースマート農業[EB/OL]. [2022-02-08]. . |
| 15 | ISEKI. NEW RTS SERIES RESPA[EB/OL]//Iseki. [2022-02-08]. . |
| 16 | SMARTASSIST[EB/OL]. [2022-04-09].. |
| 17 | 農林水産省. 園芸用施設の設置等の状況[EB/OL]. [2022-02-08]. . |
| 18 | KUBOTA. ほうれんそう収穫機[EB/OL]. [2022-02-09]. . |
| 19 | YANMAR. ねぎ収穫機HL10[EB/OL]//ヤンマー. [2022-02-10]. . |
| 20 | TAKUYA F, SHINSUKE Y, KAZUO I. System development of tomato harvesting robot based on modular design[C]// 2019 International Workshop on Smart Info-Media Systems in Asia: SS1-1. Tokyo, Japan: The Institute of Electronics, Information and Communication Engineers, 2019. |
| 21 | YAGUCHI H, NAGAHAMA K, HASEGAWA T, et al. Development of an autonomous tomato harvesting robot with rotational plucking gripper[C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, New York, USA: IEEE, 2016: 652-657. |
| 22 | YOSHIDA T, FUKAO T, HASEGAWA T. A tomato recognition method for harvesting with robots using point clouds[C]// 2019 IEEE/SICE International Symposium on System Integration. Piscataway, New York, USA: IEEE, 2019: 456-461 |
| 23 | PANASONIC NEWSROOM JAPAN. トマト収穫ソリューション~AIで農業の人手不足解消へ~トマトを自動で収穫するロボットが活躍[EB/OL]. (2018-05-23) [2022-02-11]. . |
| 24 | LI B, URA T, FUJINAGA T, et al. Development of end-effector for harvesting tomato using suction and cutting mechanism[C]// JSME annual Conference on Robotics and Mechatronics (Robomec). Tokyo, Japan: The Japan Society of Mechanical Engineers, 2017: ID 1A1-D06. |
| 25 | FUJINAGA T, YASUKAWA S, ISHII K. Development and evaluation of a tomato fruit suction cutting device[C]// 2021 IEEE/SICE International Symposium on System Integration. Piscataway, New York, USA: IEEE, 2021: 628-633. |
| 26 | KONDO N, NISHITSUJI Y, LING P P, et al. Visual feedback guided robotic cherry tomato harvesting[J]. Transactions of the ASAE, 1996, 39(6): 2331-2338. |
| 27 | KONDO N, YATA K, IIDA M, et al. Development of an end-effector for a tomato cluster harvesting robot[J]. Engineering in Agriculture, Environment and Food, 2010, 3(1): 20-24. |
| 28 | IKEDA T, FUKUZAKI R, SATO M, et al. Tomato recognition for harvesting robots considering overlapping leaves and stems[J]. Journal of Robotics and Mechatronics, 2021, 33(6): 1274-1283. |
| 29 | URAMOTO S, SUZUKI H, KUWAHARA A, et al. Tomato recognition algorithm and grasping mechanism for automation of tomato harvesting in facility cultivation[J]. Journal of Signal Processing, 2021, 25(4): 151-154. |
| 30 | FUJINAGA T, YASUKAWA S, ISHII K. Evaluation of tomato fruit harvestability for robotic harvesting[C]// 2021 IEEE/SICE International Symposium on System Integration. Piscataway, New York, USA: IEEE, 2021: 35-39. |
| 31 | YOSHIDA T, FUKAO T, HASEGAWA T, et al. Fast detection of tomato peduncle using point cloud with a harvesting robot[J]. Journal of Robotics and Mechatronics, 2018, 30(2): 180-186. |
| 32 | YOSHIDA T, FUKAO T, HASEGAWA T, aler. Cutting point detection using a robot with point clouds for tomato harvesting[J]. Journal of Robotics and Mechatronics, 2020, 32(2): 437-444. |
| 33 | CHEN X, CHAUDHARY K, TANAKA Y, et al. Reasoning-based vision recognition for agricultural humanoid robot toward tomato harvesting[C]// 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, New York, USA: IEEE, 2015: 6487-6494. |
| 34 | YAGUCHI H, HASEGAWA T, NAGAHAMA K, et al. A research of construction method for autonomous tomato harvesting robot focusing on harvesting device and visual recognition[J]. Journal of the Robotics Society of Japan, 2018, 36(10): 693-702. |
| 35 | FUJINAGA T, YASUKAWA S, ISHII K, et al. Tomato growth state map for the automation of monitoring and harvesting[J]. Journal of Robotics and Mechatronics, 2020, 32(6): 1279-1291. |
| 36 | ISHII K, MATSUO T, TAKEMURA Y, et al. Tomato-harvesting-robot competition towards smart agriculture[C]// International Conference on Artificial Life and Robotics. ALife Robotics Corporation Ltd., Oita, Japan: 2021, 26: 1-5. |
| 37 | NAKAMURA G, SAKAGUCHI K, NISHI T, et al. Development of tomato harvesting robot: Development of arm part and examination of image processing system[J]. The Proceedings of JSME annual Conference on Robotics and Mechatronics (Robomec), 2020, 32(6): 1279-1291. |
| 38 | MATSUO T, SONODA T, TAKEMURA Y, et al. Toward smart tomato greenhouse: The fourth tomato harvesting robot competition[J]. Journal of Robotics, Networking and Artificial Life, 2019, 6(2): ID 138. |
| 39 | OGUMA K, HIGUCHI S, IKEDA F, et al. Development of automatic tomato harvesting system using universal vacuum gripper and RGB-D camera[J]. The Proceedings of the International Conference on Motion and Vibration Control, 2020, 15: ID 10050. |
| 40 | HAYASHI S, GANNO K, ISHII Y, et al. Robotic harvesting system for eggplants[J]. Japan Agricultural Research Quarterly, 2002, 36(3): 163-168. |
| 41 | HAYASHI S, GANNO K, ISHII Y, et al. Development of a harvesting end-effector for eggplants[J]. Journal of Society of High Technology in Agriculture, 2001, 13(2): 97-103. |
| 42 | AGRIST CO, LTD. AI農業ロボット開発のAGRIST株式会社[EB/OL]. [2022-02-11]. . |
| 43 | ARIMA S, KONDO N, SHIBANO Y, et al. Studies on cucumber harvesting robot (part l). investigation of cultivation training and mechanism of manipulator[J]. Journal of the Japanese Society of Agricultural Machinery, 1994, 56(1): 55-64. |
| 44 | SEIICHI A, NAOSHI K, HIROSHI N. Development of robotic system for cucumber harvesting[J]. Japan Agricultural Research Quarterly, 1996, 30(4): 233-238. |
| 45 | FUJIURA T, UEDA K, CHUNG S H, et al. Vision system for cucumber-harvesting robot[J]. IFAC Proceedings Volumes, 2000, 33(29): 61-65. |
| 46 | SYED T N, JIZHAN L, XIN Z, et al. Seedling-lump integrated non-destructive monitoring for automatic transplanting with Intel RealSense depth camera[J]. Artificial Intelligence in Agriculture, 2019, 3: 18-32. |
| 47 | ROSHANIANFARD A, KAMATA T, NOGUCHI N. Performance evaluation of harvesting robot for heavy-weight crops[J]. IFAC-PapersOnLine, 2018, 51(17): 332-338. |
| 48 | SAKAI H, SHIIGI T, KONDO N, et al. Accurate position detecting during asparagus spear harvesting using a laser sensor[J]. Engineering in Agriculture, Environment and Food, 2013, 6(3): 105-110. |
| 49 | IRIE N, TAGUCHI N. Asparagus harvesting robot[J]. Journal of Robotics and Mechatronics, 2014, 26(2): 267-268. |
| 50 | FUNAMI Y, KAWAKURA S, TADANO K. Development of a robotic arm for automated harvesting of asparagus[J]. European Journal of Agriculture and Food Sciences, 2020, 2(1): 1-10. |
| 51 | YOSHIDA H. Inahoがアスパラ自動収穫ロボの正式サービス開始、初号機は佐賀県の農家に導入[EB/OL]. [2022-02-11]. . |
| 52 | HAYASHI S, SHIGEMATSU K, YAMAMOTO S, et al. Evaluation of a strawberry-harvesting robot in a field test[J]. Biosystems Engineering, 2010, 105(2): 160-171. |
| 53 | SHIIGI T, KURITA M, KONDO N, et al. Strawberry harvesting robot for fruits grown on table top culture[C]// 2008 ASABE Meeting. St. Joseph, USA: American Society of Agricultural and Biological Engineers, 2008. |
| 54 | KONDO N, NINOMIYA K, HAYASHI S, et al. A new challenge of robot for harvesting strawberry grown on table top culture[EB/OL]. [2022-01-30]. . |
| 55 | KONDO N, MONTA M, HISAEDA K. Harvesting robot for strawberry grown on annual hill top. Part 2. Manufacture of the second prototype robot and fundamental harvesting experiment[J]. Shokubutsu Kojo Gakkaishi, 2001, 13(4): 231-236. |
| 56 | 熟れた実だけ採取する「農業収穫ロボ」の実力:日経ビジネス電子版[EB/OL]. [2022-02-09]. . |
| 57 | KONDO N. Strawberry harvesting robot[J]. Journal of the Society of Mechanical Engineers, 2000, 103(976): 148-149. |
| 58 | ARIMA S, KONDO N, YAGI Y, et al. Harvesting robot for strawberry grown on table top culture[J]. Journal of Society of High Technology in Agriculture, 2001, 13(3): 159-166. |
| 59 | 近藤直, 門田充司, 久枝和昇. 内成り栽培用イチゴ収穫ロボット (第2報)[J]. 植物工場学会誌, 2001, 13(4): 231-236. |
| 60 | RAJENDRA P, KONDO N, NINOMIYA K, et al. Machine vision algorithm for robots to harvest strawberries in tabletop culture greenhouses[J]. Engineering in Agriculture, Environment and Food, 2009, 2(1): 24-30. |
| 61 | HAYASHI S, SAITO S, IWASAKI Y, et al. Development of circulating-type movable bench system for strawberry cultivation: MAFF[J]. Japan Agricultural Research Quarterly, 2011, 45(3): 285-293. |
| 62 | HAYASHI S, YAMAMOTO S, SAITO S, et al. Field operation of a movable strawberry-harvesting robot using a travel platform[J]. Japan Agricultural Research Quarterly, 2014, 48(3): 307-316. |
| 63 | HAYASHI S, YAMAMOTO S, TSUBOTA S, et al. Development and practical application of stationary strawberry-harvesting robot integrated with movable bench system[J]. Journal of Japanese Society of Agricultural Machinery, 2017, 79(5): 415-425. |
| 64 | HABARAGAMUWA H, OGAWA Y, SUZUKI T, et al. Detecting greenhouse strawberries (mature and immature), using deep convolutional neural network[J]. Engineering in Agriculture, Environment and Food, 2018, 11(3): 127-138. |
| 65 | 坪田将吾, 手島司, 山本聡史, 等. 定置型イチゴ収穫ロボットによる糖度計測技術の開発[J]. 植物環境工学, 2019, 31(1): 31-41. |
| 66 | 植物工場・農業ビジネスオンライン. NARO・シブヤ精機、昼間にも収穫可能な定置型のイチゴ収穫ロボットを開発[EB/OL]. (2013-06-13) [2022-02-11]. . |
| 67 | HUANG Z, SHIIGI T, TSAY L W J, et al. A sound-based positioning system with centimeter accuracy for mobile robots in a greenhouse using frequency shift compensation[J]. Computers and Electronics in Agriculture, 2021, 187: ID 106235. |
| 68 | NEWSWITCH. 農業ロボット、機能進化するも普及は?[EB/OL]. (2016-04-16) [2022-02-11]. . |
| 69 | HUANG Z, FUKUDA H, LWAI JACKY T, et al. Greenhouse based orientation measurement system using spread spectrum sound[J]. IFAC-PapersOnLine, 2018, 51(17): 108-111. |
| 70 | HUANG Z, LWAI JACKY T, ZHAO X, et al. Noise tolerance evaluation of spread spectrum sound-based positioning system for a quadcopter in a greenhouse[J]. IFAC-PapersOnLine, 2019, 52(30): 239-242. |
| 71 | HUANG Z, JACKY T L W, ZHAO X, et al. Position and orientation measurement system using spread spectrum sound for greenhouse robots[J]. Biosystems Engineering, 2020, 198: 50-62. |
| 72 | HOU Z, LI Z, FADIJI T, et al. Soft grasping mechanism of human fingers for tomato-picking bionic robots[J]. Computers and Electronics in Agriculture, 2021, 182: ID 106010. |
| 73 | YU Y, ZHANG K, LIU H, et al. Real-time visual localization of the picking points for a ridge-planting strawberry harvesting robot[J]. IEEE Access, 2020, 8: 116556-116568. |
| 74 | DE PRETER A, ANTHONIS J, DE BAERDEMAEKER J. Development of a robot for harvesting strawberries[J]. IFAC-PapersOnLine, 2018, 51(17): 14-19. |
| 75 | XIONG Y, GE Y, GRIMSTAD L, et al. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation[J]. Journal of Field Robotics, 2020, 37(2): 202-224. |
| 76 | ASLAN M F, DURDU A, SABANCI K, et al. A comprehensive survey of the recent studies with UAV for precision agriculture in open fields and greenhouses[J]. Applied Sciences, 2022, 12(3): ID 1047. |
| 77 | BOGUE R. Fruit picking robots: Has their time come?[J]. Industrial Robot, 2020, 47(2): 141-145. |
| 78 | VITZRABIN E, EDAN Y. Adaptive thresholding with fusion using a RGBD sensor for red sweet-pepper detection[J]. Biosystems Engineering, 2016, 146: 45-56. |
| 79 | FU L, GAO F, WU J, et al. Application of consumer RGB-D cameras for fruit detection and localization in field: A critical review[J]. Computers and Electronics in Agriculture, 2020, 177: ID 105687. |
| 80 | 李扬, 张萍, 苑进, 等. 白芦笋采收机器人视觉定位与采收路径优化方法[J]. 智慧农业(中英文), 2020, 2(4): 65-78. |
| LI Y, ZHANG P, YUAN J, et al. Visual positioning and harvesting path optimization of white asparagus harvesting robot[J]. Smart Agriculture, 2020, 2(4): 65-78. | |
| 81 | KOUNALAKIS N, KALYKAKIS E, PETTAS M, et al. Development of a tomato harvesting robot: Peduncle recognition and approaching[C]// 2021 3rd International Congress on Human-Computer Interaction, Optimization and Robotic Applications. Piscataway, New York, USA: IEEE, 2021: 1-6. |
| 82 | WANG G, YU Y, FENG Q. Design of end-effector for tomato robotic harvesting[J]. IFAC-PapersOnLine, 2016, 49(16): 190-193. |
| 83 | HUANG Z, OMWANGE K A, TSAY L W J, et al. UV excited fluorescence image-based non-destructive method for early detection of strawberry (Fragaria × ananassa) spoilage[J]. Food Chemistry, 2022, 368: ID 130776. |
| 84 | NIE S, RIZA D FAL, OGAWA Y, et al. Potential of a double lighting imaging system for characterization of "Hayward" kiwifruit harvest indices[J]. Postharvest Biology and Technology, 2020, 162: ID 111113. |
| [1] | DUAN Luojia, YANG Fuzeng, YAN Bin, SHI shuaiqi, QIN jifeng. Research Progress of Apple Production Intelligent Chassis and Weeding and Harvesting Equipment Technology [J]. Smart Agriculture, 2022, 4(3): 24-41. |
| [2] | LI Yang, ZHANG Ping, YUAN Jin, LIU Xuemei. Visual Positioning and Harvesting Path Optimization of White Asparagus Harvesting Robot [J]. Smart Agriculture, 2020, 2(4): 65-78. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







