| 1 |
刘成, 冯中朝, 肖唐华, 等. 我国油菜产业发展现状、潜力及对策[J]. 中国油料作物学报, 2019, 41(4): 485-489.
|
|
LIU C, FENG Z C, XIAO T H, et al. Development, potential and adaptation of Chinese rapeseed industry[J]. Chinese journal of oil crop sciences, 2019, 41(4): 485-489.
|
| 2 |
HAN X Z, KIM H J, JEON C W, et al. Design and field testing of a polygonal paddy infield path planner for unmanned tillage operations[J]. Computers and electronics in agriculture, 2021, 191: ID 106567.
|
| 3 |
陈凯, 解印山, 李彦明, 等. 多约束情形下的农机全覆盖路径规划方法[J]. 农业机械学报, 2022, 53(5): 17-26, 43.
|
|
CHEN K, XIE Y S, LI Y M, et al. Full coverage path planning method of agricultural machinery under multiple constraints[J]. Transactions of the Chinese society for agricultural machinery, 2022, 53(5): 17-26, 43.
|
| 4 |
WANG H, NOGUCHI N. Adaptive turning control for an agricultural robot tractor[J]. International journal of agricultural and biological engineering, 2018, 11(6): 113-119.
|
| 5 |
WANG H, NOGUCHI N. Autonomous maneuvers of a robotic tractor for farming[C]// 2016 IEEE/SICE International Symposium on System Integration (SII). Piscataway, New Jersey, USA: IEEE, 2016: 592-597.
|
| 6 |
YIN X A, DU J A, NOGUCHI N, et al. Development of autonomous navigation system for rice transplanter[J]. International journal of agricultural and biological engineering, 2018, 11(6): 89-94.
|
| 7 |
MA Z H, YIN C, DU X Q, et al. Rice row tracking control of crawler tractor based on the satellite and visual integrated navigation[J]. Computers and electronics in agriculture, 2022, 197: ID 106935.
|
| 8 |
HE J, HU L, WANG P, et al. Path tracking control method and performance test based on agricultural machinery pose correction[J]. Computers and electronics in agriculture, 2022, 200: ID 107185.
|
| 9 |
LI S C, ZHANG M, JI Y H, et al. Agricultural machinery GNSS/IMU-integrated navigation based on fuzzy adaptive finite impulse response Kalman filtering algorithm[J]. Computers and electronics in agriculture, 2021, 191: ID 106524.
|
| 10 |
JING Y P, LI Q, YE W S, et al. Development of a GNSS/INS-based automatic navigation land levelling system[J]. Computers and electronics in agriculture, 2023, 213: ID 108187.
|
| 11 |
吴才聪, 王东旭, 陈智博, 等. SF2104拖拉机自主行驶与作业控制方法[J]. 农业工程学报, 2020, 36(18): 42-48.
|
|
WU C C, WANG D X, CHEN Z B, et al. Autonomous driving and operation control method for SF2104 tractors[J]. Transactions of the Chinese society of agricultural engineering, 2020, 36(18): 42-48.
|
| 12 |
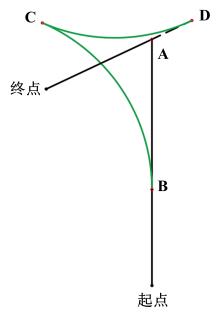
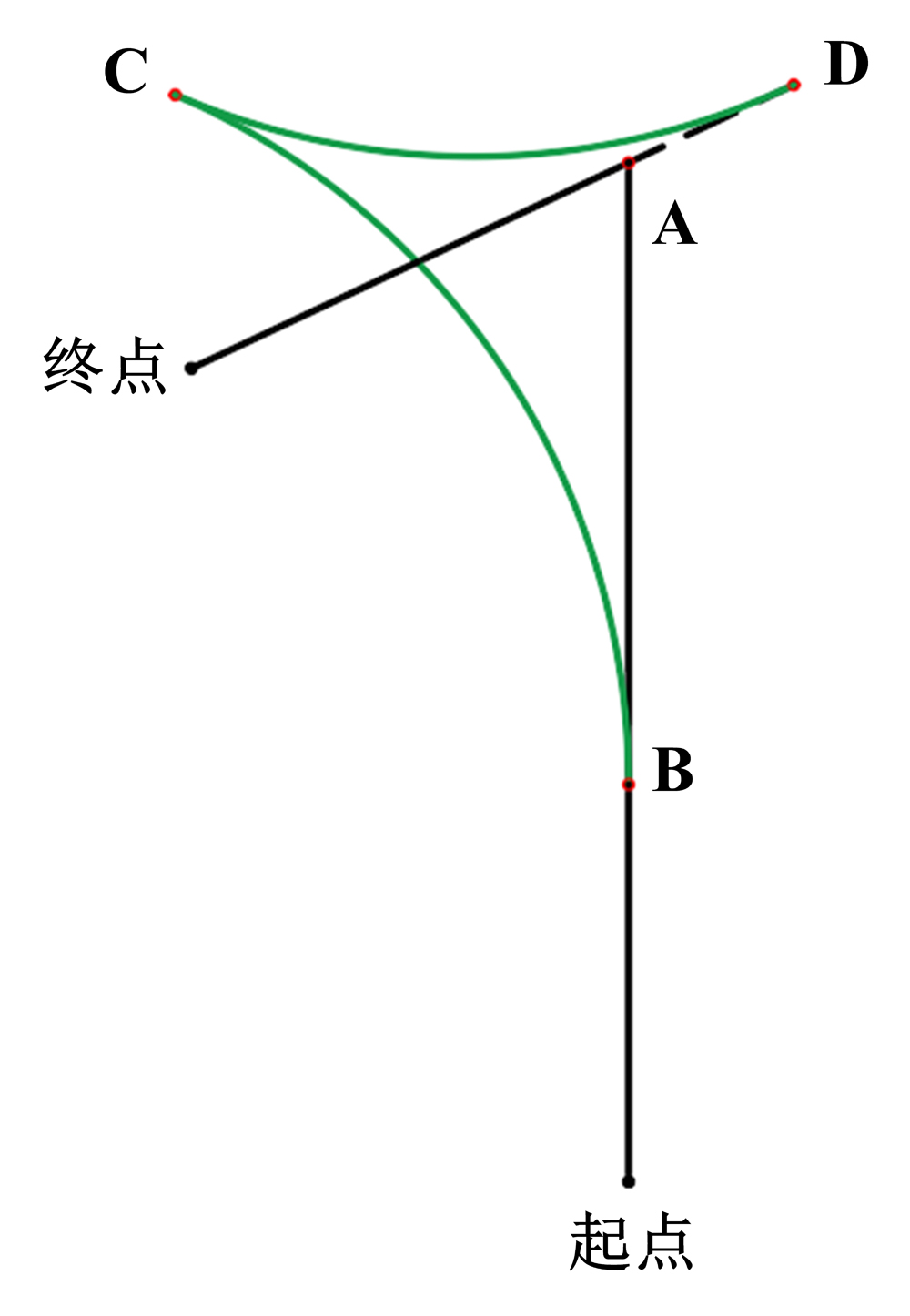
张朝宇, 卢邦, 李强, 等. 油菜无人播种作业两退三切鱼尾自动调头方法[J]. 农业机械学报, 2022, 53(10): 66-75.
|
|
ZHANG C Y, LU B, LI Q, et al. Unmanned seeding automatic control method of rapeseed based on two-back and three-cut fishtail U-turn model[J]. Transactions of the Chinese society for agricultural machinery, 2022, 53(10): 66-75.
|
| 13 |
刘兆朋, 张智刚, 罗锡文, 等. 雷沃ZP9500高地隙喷雾机的GNSS自动导航作业系统设计[J]. 农业工程学报, 2018, 34(1): 15-21.
|
|
LIU Z P, ZHANG Z G, LUO X W, et al. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS[J]. Transactions of the Chinese society of agricultural engineering, 2018, 34(1): 15-21.
|
| 14 |
万星宇, 廖庆喜, 廖宜涛, 等. 油菜全产业链机械化智能化关键技术装备研究现状及发展趋势[J]. 华中农业大学学报, 2021, 40(2): 24-44.
|
|
WAN X Y, LIAO Q X, LIAO Y T, et al. Situation and prospect of key technology and equipment in mechanization and intelligentization of rapeseed whole industry chain[J]. Journal of Huazhong agricultural university, 2021, 40(2): 24-44.
|
| 15 |
吴迪军. UTM投影地区工程独立坐标系的建立方法[J]. 测绘工程, 2020, 29(4): 7-10, 14.
|
|
WU D J. Establishment of engineering independent coordinate system in countries and regions using UTM projection[J]. Engineering of surveying and mapping, 2020, 29(4): 7-10, 14.
|
| 16 |
徐胜攀, 刘正军, 左志权, 等. 一种改进的活性边表区域填充算法[J]. 计算机工程与应用, 2014, 50(17): 178-181.
|
|
XU S P, LIU Z J, ZUO Z Q, et al. Improved active-edge-table area filling algorithm[J]. Computer engineering and applications, 2014, 50(17): 178-181.
|
| 17 |
YANG Y, LI Y K, WEN X, et al. An optimal goal point determination algorithm for automatic navigation of agricultural machinery: Improving the tracking accuracy of the Pure Pursuit algorithm[J]. Computers and electronics in agriculture, 2022, 194: ID 106760.
|
| 18 |
XU L J, YANG Y K, CHEN Q H, et al. Path tracking of a 4WIS-4WID agricultural machinery based on variable look-ahead distance[J]. Applied sciences, 2022, 12(17): ID 8651.
|
| 19 |
AHN J, SHIN S, KIM M, et al. Accurate path tracking by adjusting look-ahead point in pure pursuit method[J]. International journal of automotive technology, 2021, 22(1): 119-129.
|
| 20 |
FUE K, PORTER W, BARNES E, et al. Autonomous navigation of a center-articulated and hydrostatic transmission rover using a modified pure pursuit algorithm in a cotton field[J]. Sensors, 2020, 20(16): ID 4412.
|
| 21 |
ZHANG C L, GAO G L, ZHAO C Z, et al. Research on 4WS agricultural machine path tracking algorithm based on fuzzy control pure tracking model[J]. Machines, 2022, 10(7): ID 597.
|
| 22 |
张华强, 王国栋, 吕云飞, 等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报, 2020, 51(9): 18-25.
|
|
ZHANG H Q, WANG G D, LYU Y F, et al. Agricultural machinery automatic navigation control system based on improved pure tracking model[J]. Transactions of the Chinese society for agricultural machinery, 2020, 51(9): 18-25.
|
 ), DONG Wanjing1,2, DING Youchun1,2(
), DONG Wanjing1,2, DING Youchun1,2(