Smart Agriculture ›› 2022, Vol. 4 ›› Issue (3): 24-41.doi: 10.12133/j.smartag.SA202206010
段罗佳1,2,3,4( ), 杨福增1,2,3(), 闫彬1,2,3, 史帅旗1,2,3, 秦纪凤1,2,3
), 杨福增1,2,3(), 闫彬1,2,3, 史帅旗1,2,3, 秦纪凤1,2,3
收稿日期:2022-06-21
出版日期:2022-09-30
基金项目:作者简介:段罗佳(1990-),男,博士研究生,工程师,研究方向为智能化农业机械装备技术。E-mail:duanluojia@126.com
通信作者:
杨福增(1966-),男,博士,教授,研究方向为智能化农业机械装备技术。E-mail:yangfzkm@nwafu.edu.cn
DUAN Luojia1,2,3,4(), YANG Fuzeng1,2,3(), YAN Bin1,2,3, SHI shuaiqi1,2,3, QIN jifeng1,2,3
Received:2022-06-21
Online:2022-09-30
Foundation items:Shaanxi Province Major Science and Technology Breakthrough Program (202d0zdzx03-04-01)
About author:DUAN Luojia, E-mail:duanluojia@126.com
Corresponding author:YANG Fuzeng, E-mail:yangfzkm@nwafu.edu.cn
摘要:
苹果产业作为苹果主产区经济发展的支柱产业,为当地果农增收、农业增效做出了重要贡献。随着产业的转型升级,苹果生产机械化和智能化的发展程度将影响其经济效益。为推进苹果生产智能化技术研究与智能装备研发,本文概述了苹果生产各个环节机械化水平,阐述了动力底盘、除草装备、收获装备等苹果生产装备主要技术特点,归纳了自动调平与控制、自主导航、自动避障、杂草识别、杂草去除、苹果识别、苹果定位、苹果分离等技术分别在智能化动力底盘、智能除草装备、苹果采收机器人上的研究与应用进展,并阐明了上述3种智能装备关键技术的基本原理和特点。在此基础上,指出了目前苹果生产智能装备技术面临的挑战,并提出了发展建议。
中图分类号:
段罗佳, 杨福增, 闫彬, 史帅旗, 秦纪凤. 苹果生产智能底盘与除草及收获装备技术研究进展[J]. 智慧农业(中英文), 2022, 4(3): 24-41.
DUAN Luojia, YANG Fuzeng, YAN Bin, SHI shuaiqi, QIN jifeng. Research Progress of Apple Production Intelligent Chassis and Weeding and Harvesting Equipment Technology[J]. Smart Agriculture, 2022, 4(3): 24-41.

图1
果园动力底盘类型

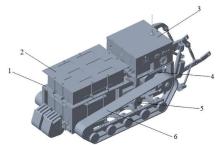
图2
电动履带动力底盘注: 1.车架; 2.动力电池组; 3.控制系统; 4.左右侧减速机; 5.左右侧驱动电机; 6.左右侧履带
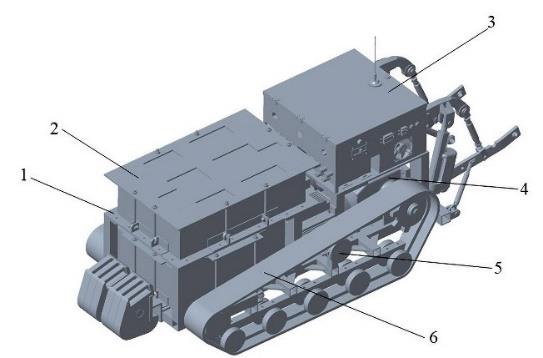
表1
四种类型果园导航技术性能对比
| 导航技术 | 优点 | 缺点 |
|---|---|---|
| 卫星导航[ | 1.应用范围广 2.定位精度高 3.全天候工作 | 1.易受果园郁闭环境影响,导致信号丢失 2.由于自身工作原理,有很多误差 |
| 机器视觉导航[ | 1.速度快 2.信息量大 3.功能多 | 1.受光照和阴影的影响,鲁棒性需提高 2.受地形等环境影响,存在图像模糊等现象 |
| 激光雷达导航[ | 1.抗干扰能力强 2.扫描速度快 3.定位精准 | 1.成本相对较高 2.低于农机的障碍物或作物难以识别 |
| 多传感融合器导航[ | 1.定位精度最高 2.实时性好 3.系统鲁棒性强 | 1.数据融合处理相对复杂 2.基础融合理论与算法仍需完善 |

图3
苹果果园除草机类型

图4
仿生除草装置
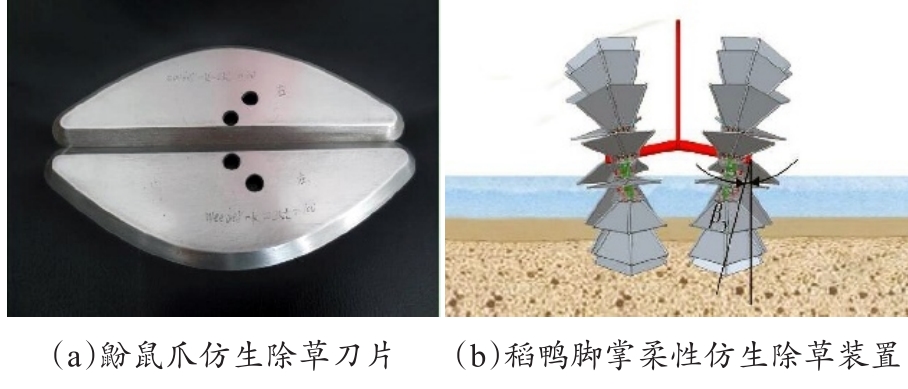
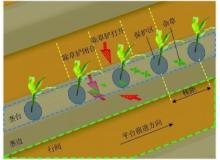
图5
株间除草原理图
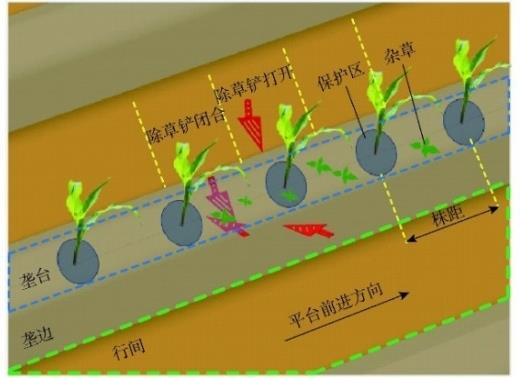

图6
苹果收获形式[75,76]
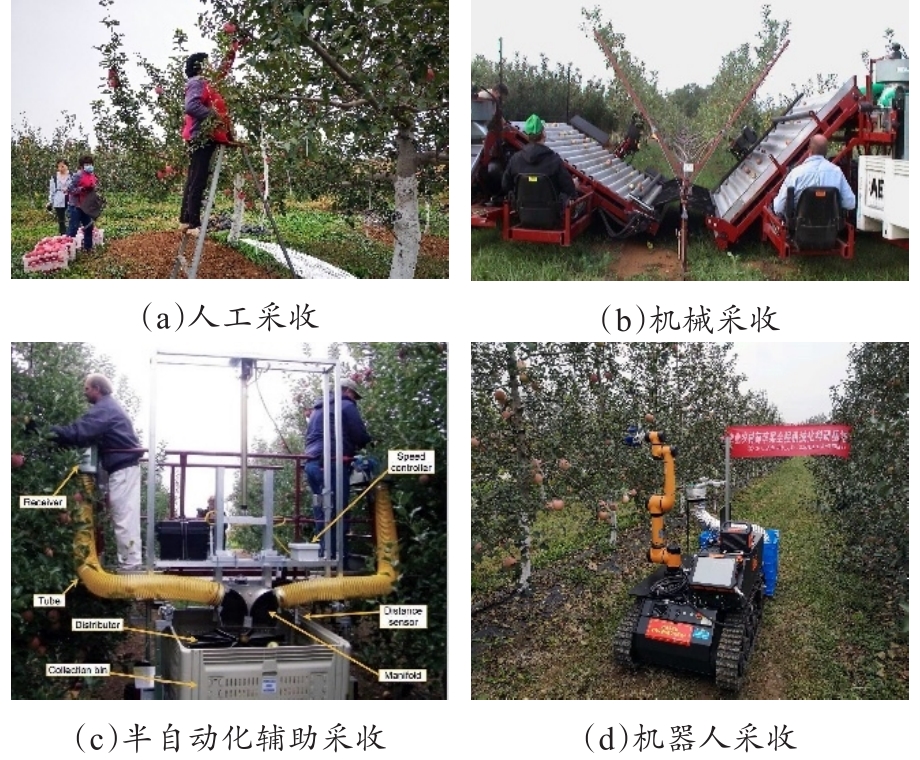
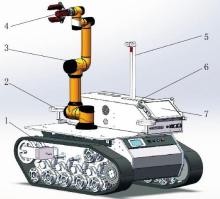
图7
苹果采收机器人注:1.智能履带底盘;2.导航系统;3.机械臂;4.末端执行器;5.深度相机;6.控制系统及电源箱;7.显控一体机
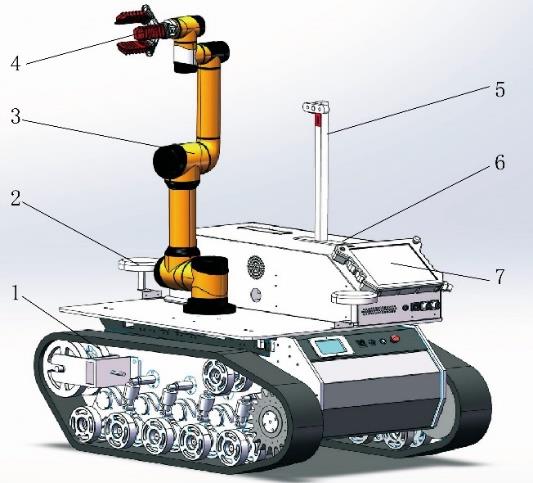
表2
四种类型的苹果识别机器学习算法比较
| 机器学习算法 | 特点 | 不足 |
|---|---|---|
| 支持向量机 | 1.是一种非参数方法,具有一定的灵活性 2.可实现复杂功能,同时又能适应过度拟合 | 1.针对大批量果树图像的学习策略难以实施 2.解决青苹果、红苹果、树枝与树叶等多目标分类问题尚存在一定困难 |
| 神经网络 | 1.可以维持非线性算法的高精度 2.确保结果最佳逼近、全局最优、收敛速度快 | 1.可能会出现过拟合、中心难定、学习率偏低 2.网络运行效率和识别精度难以满足要求 |
| 聚类算法 | 1.技术简单、聚类相似输出 2.可被多层堆栈、效果直观 | 1.没有进行全局优化 2.某些情况下,随层数增加会失效,收益递减 |
| 深度学习 | 1.可以自动提取参数。 2.封闭静态环境,训练效果好,精度高。 | 1.对于动态环境效果较差,训练效果不好 2.需要大量数据进行训练,训练结果难以迁移 |

图 8
常用深度相机


图9
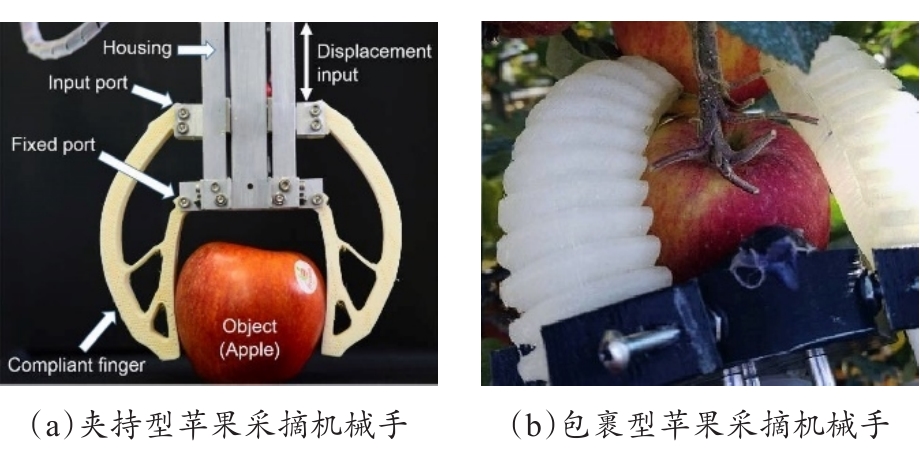
苹果采摘机械手类型[120,121]
| 1 | FORSLINE P L, ALDWINCKLE H S, DICKSON E E, et al. Collection, maintenance, characterization and utilization of wild apples of Central Asia[J]. Horticultural Reviews, 2003, 29: 1-61. |
| 2 | 霍学喜, 刘天军, 刘军弟, 等. 2020年度中国苹果产业发展报告(精简版)[J]. 中国果菜, 2022, 42(2): 1-6. |
| HUO X, LIU T, LIU J, et al. 2020 China apple industry development report (simplified version)[J]. China Fruit & Vegetable, 2022, 42(2): 1-6. | |
| 3 | LABORDE D, MARTIN W, SWINNEN J, et al. COVID-19 risks to global food security[J]. Science, 2020, 369(6503): 500-502. |
| 4 | 张旭青, 杜丽永, 朱启荣. 人工成本约束下苹果生产环节资本替代劳动的潜力研究[J]. 农业现代化研究, 2020, 41(3): 484-492. |
| ZHANG X, DU L, ZHU Q. The potential of substituting labors with capitals in apple production under the constraint of increasing labor cost[J]. Research of Agricultural Modernization, 2020, 41(3): 484-492. | |
| 5 | 王衡, 王军山. 烟台市苹果机械化发展现状及发展方向[J]. 山东农机化, 2021, (4): 31-32. |
| 6 | 王韦韦, 陈黎卿, 杨洋, 等. 农业机械底盘技术研究现状与展望[J]. 农业机械学报, 2021, 52(8): 1-15. |
| WANG W, CHEN L, YANG Y, et al. Development and prospect of agricultural machinery chassis technology[J]. Transactions of the CSAM, 2021, 52 ( 8 ) : 1-15. | |
| 7 | 郑永军, 江世界, 陈炳太, 等. 丘陵山区果园机械化技术与装备研究进展[J]. 农业机械学报, 2020, 51(11): 1-20. |
| ZHENG Y, JIANG S, CHEN B, et al. Review on technology and equipment of mechanization in hilly orchard [J]. Transactions of the CSAM, 2020, 51(11): 1-20. | |
| 8 | 李晨硕, 邹娇蓉, 李继光.国外专业型果园轮式拖拉机主要产品概述[J]. 拖拉机与农用运输车, 2021, 48(4): 4-7. |
| LI C, ZOU J, LI J. Overview of main products of professional orchard wheeled tractor in foreign countries[J]. Tractor&Farm Transporter, 2021, 48 (4): 4-7. | |
| 9 | 郝朝会, 杨学军, 刘立晶, 等. 果园多功能动力底盘设计与试验[J]. 农业机械学报, 2018, 49(12): 66-73, 92. |
| HAO C, YANG X, LIU L, et al. Design and experiment of multifunctional dynamic chassis for orchard[J]. Transactions of the CSAM, 2018, 49 (12): 66-73, 92. | |
| 10 | 李昊伦. 基于PLC的小型履带式农用动力底盘控制系统设计[D]. 保定: 河北农业大学, 2021. |
| LI H. Design of small crawler type agricultural power chassis control system based on PLC[D]. Baoding: Hebei Agricultural University, 2021. | |
| 11 | 王锋. 丘陵山地果园动力底盘的坡地通过性研究[D]. 重庆: 西南大学, 2020. |
| WANG F. Study on slope passability of the orchard power chassis in hilly area[D]. Chongqing: Southwest University, 2020. | |
| 12 | 郭惠萍, 王常林, 曹亚州, 等. 一种分布驱动式双电池组小型温室电动履带拖拉机: CN114408037A [P]. 2022-04-29. |
| 13 | 范思宇. 果园电动履带底盘轻量化与动力学研究[D]. 广州: 华南农业大学, 2017. |
| FAN S. Lightweight design and dynamics research of chassis frame for orchard electric tracked vehicle[D]. Guangzhou: South China Agricultural University, 2017. | |
| 14 | DE MELO R R, TOFOLI F L, DAHER S, et al. Wheel slip control applied to an electric tractor for improving tractive efficiency and reducing energy consumption[J]. Sensors, 2022, 4527: 1-22. |
| 15 | XIE B, WANG S, WU X, et al. Design and hardware-in-the-loop test of a coupled drive system for electric tractor[J]. Biosystems Engineering, 2022, 216: 165-185. |
| 16 | HOEHN-K W, TOMPSON-W L. Remotely adjustable disk leveling system: 4809786[P]. 1989-03-07. |
| 17 | YUKIKAZU T. Posture controlling device for combine harvester: JP2013055897[P]. 2013-03-28. |
| 18 | 张战文. 微型履带山地拖拉机稳定性能研究[D]. 杨凌: 西北农林科技大学, 2011. |
| ZHANG Z. Research on stability of micro-hillside caterpillar tractor[D]. Yangling: Northwest A&F University, 2011. | |
| 19 | 王涛. 山地拖拉机车身自动调平控制系统的设计与试验[D]. 杨凌: 西北农林科技大学, 2014. |
| WANG T. Design and test of the hillside tractor body automatic leveling control system[D]. Yangling: Northwest A&F University, 2014. | |
| 20 | WANG Y, YANG F, PAN G, et al. Design and testing of a small remote-control hillside tractor[J]. Transactions of the ASABE, 2014, 57(2): 363-370. |
| 21 | 齐文超. 丘山地拖拉机姿态主动调整系统研究 [D]. 上海: 上海交通大学, 2020. |
| QI W. Research om active attitude adjustment system of tractors in hilly mountains[D]. Shanghai: Shanghai Jiao Tong University, 2020. | |
| 22 | 孙景彬, 楚国评, 潘冠廷, 等. 遥控全向调平山地履带拖拉机设计与性能试验[J]. 农业机械学报, 2021, 52(5): 358-369. |
| SUN J, CHU G, PAN G, et al. Design and performance test of remote control omnidirectional leveling hillside crawler tractor[J]. Transactions of the CSAM, 2021, 52(5): 358-369. | |
| 23 | LI Y, HUANG F, LIU C. Coordinated control of working implements-vehicle body for terrain adaptation of a robotized hilly tractor[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 216: 165-185. |
| 24 | 刘成良, 林洪振, 李彦明, 等. 农业装备智能控制技术研究现状与发展趋势分析[J]. 农业机械学报, 2020, 51(1): 1-18. |
| LIU C, LIN H, LI Y, et al. Analysis on status and development trend of intelligent control technology for agricultural equipment[J]. Transactions of the CSAM, 2020, 51(1): 1-18. | |
| 25 | 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. |
| ZHANG M, JI Y, LI S, et al. Research progress of agricultural machinery navigation technology[J]. Transactions of the CSAM, 2020, 51(4): 1-18. | |
| 26 | 罗锡文, 廖娟, 邹湘军, 等. 信息技术提升农业机械化水平[J]. 农业工程学报, 2016, 32(20): 1-14. |
| LUO X, LIAO J, ZOU X, et al. Enhancing agricultural mechanization level through information technology[J]. Transactions of the CSAE, 2016, 32(20): 1-14. | |
| 27 | 李会宾, 韩伟, 史云. 果园作业机器人的自主行间导航系统研究[J]. 中国农业信息, 2019, 31(4): 51-64. |
| LI H, HAN W, SHI Y. Autonomous inter-line navigation system for orchard robots[J]. China Agricultural Information, 2019, 31(4): 51-64. | |
| 28 | 胡静涛, 高雷, 白晓平, 等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10): 1-10. |
| HU J, GAO L, BAI X, et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the CSAE, 2015, 31(10): 1-10. | |
| 29 | 莫冬炎, 杨尘宇, 黄沛琛, 等. 基于环境感知的果园机器人自主导航技术研究进展[J]. 机电工程技术, 2021, 50(9): 145-150. |
| MO D, YANG C, HUANG P, et al. Research progress of autonomous navigation technology for orchard robots based on environment perception[J]. Mechanical & Electrical Engineering Technology, 2021, 50(9): 145-150. | |
| 30 | 徐俊杰. 基于视觉的丘陵山区田间道路场景理解和障碍物检测研究[D]. 重庆: 西南大学, 2019. |
| XU J. Research for field road scene recognition and obstacle detection in hilly areas based on vision[D]. Chongqing: Southwest University, 2019. | |
| 31 | 刘星星, 张超, 张浩, 等. 最小二乘法与SVM组合的林果行间自主导航方法[J]. 农业工程学报, 2021, 37(9): 157-164. |
| LIU X, ZHANG C, ZHANG H, et al. Inter-row automatic navigation method by combining least square and SVM in forestry[J]. Transactions of the CSAE, 2021, 37(9): 157-164. | |
| 32 | 刘志杰, 王小乐, 任志刚, 等. 基于虚拟雷达模型的履带拖拉机导航路径跟踪控制算法[J]. 农业机械学报, 2021, 52(6): 376-385. |
| LIU Z, WANG X, REN Z, et al. Crawler tractor navigation path tracking control algorithm based on virtual radar model[J]. Transactions of the CSAM, 2021, 52(6): 376-385. | |
| 33 | 刘伟洪, 何雄奎, 刘亚佳, 等. 果园行间3D LiDAR导航方法[J]. 农业工程学报, 2021, 37(9): 165-174. |
| LIU W, HE X, LIU Y, et al. Navigation method between rows for orchard based on 3D LiDAR[J]. Transactions of the CSAE, 2021, 37(9): 165-174. | |
| 34 | GUEVARA J, CHEEIN F A. A, GENE-MOLA J,et al. Analyzing and overcoming the effects of GNSS error on LiDAR based orchard parameters estimation[J]. Computers and Electronics in Agriculture, 2020, 170: 1-10. |
| 35 | ZHANG L, ZHANG R, LI L, et al. Research on virtual Ackerman steering model based navigation system for tracked vehicles[J]. Computers and Electronics in Agriculture, 2022, 192: 1-13. |
| 36 | 于威, 韩晓梅. 现代化果园机械除草装备与技术应用现状及发展趋向[J]. 现代农村科技, 2017, (6): 97. |
| 37 | 李江国, 刘占良, 张晋国, 等. 国内外田间机械除草技术研究现状[J]. 农机化研究, 2006(10): 14-16. |
| LI J, LIU Z, ZHANG J, et al. Review of mechanical weeding technique in field at home and abroad [J]. Journal of Agricultural Mechanization Research, 2006(10): 14-16. | |
| 38 | 杨天, 赵武云, 陈伯鸿, 等. 我国果园割草机发展现状与展望[J]. 农业工程, 2022, 12(1): 5-14. |
| YANG T, ZHAO W, CHEN B, et al. Development status and prospect of orchard lawn mower in China[J]. Agricultural Engineering, 2022, 12(1): 5-14. | |
| 39 | 杨硕, 李法德, 闫银发, 等. 果园株间机械除草技术研究进展与分析[J]. 农机化研究, 2020, 42(10): 1-8, 16. |
| YANG S, LI F, YAN Y, et al. Research progress and analysis of intra-Row mechanical weeding technology for orchards[J]. Journal of Agricultural Mechanization Research, 2020, 42(10): 1-8, 16. | |
| 40 | 王永烁, 康建明, 彭强吉, 等. 果树株间避障除草机设计与试验[J]. 吉林大学学报(工学版), 2022, 20(2): 1-11. |
| WANG Y, KANG J, PENG Q, et al. Design and experiment of obstacle avoidance weeding machine for fruit trees[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 20(2): 1-11. | |
| 41 | 徐丽明, 赵诗建, 马帅, 等. 葡萄株间除草机精准避障控制系统优化设计与试验[J]. 农业工程学报, 2021, 37(15): 31-39. |
| XU L, ZHAO S, MA S, et al. Optimized design and experiment of the precise obstacle avoidance control system for a grape interplant weeding machine[J]. Transactions of the CSAE, 2021, 37(15): 31-39. | |
| 42 | 徐丽明, 于畅畅, 刘文, 等. 篱架式栽培葡萄株间除草机自动避障机构优化设计[J]. 农业工程学报, 2018, 34(7): 23-30. |
| XU L, YU C, LIU W, et al. Optimal design on auto obstacle avoidance mechanism of intra-row weeder for trellis cultivated grape[J]. Transactions of the CSAE, 2018, 34(7): 23-30. | |
| 43 | 李雪军, 毛雷, 杨欣, 等. 果园割草机垄面切割装置振动特性分析[J]. 中国农机化学报, 2020, 41(11): 51-59. |
| LI X, MAO L, YANG X, et al. Analysis of vibration characteristics of ridge surface device of orchard mower[J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 51-59. | |
| 44 | 朱站伟, 汤智辉, 何义川, 等. 果园株间除草自动避障装置的设计与试验[J]. 农机化研究, 2020, 42(6): 147-153. |
| ZHU Z, TANG Z, HE Y, et al. Design and experiment of automatic obstacle avoidance device for weeding between plants[J]. Journal of Agricultural Mechanization Research, 2020, 42(6): 147-153. | |
| 45 | 史璐, 刘洪杰, 刘伟起, 等. 基于激光雷达的果园割草机避障方法研究[J]. 农机化研究, 2023, 45(2): 62-66. |
| SHI L, LIU H, LIU W, et al. Research on obstacle avoidance method of orchard mower based on LiDAR[J]. Journal of Agricultural Mechanization Research, 2023, 45(2): 62-66. | |
| 46 | AVERILL K M, WESTBROOK A S, PINEDA-BERMUDEZ L, et al. Effects of Tertill® weeding robot on weed abundance and diversity[J]. Agronomy, 2022, 12(8): 1754. |
| 47 | REISER D, SEHSAH E, BUMANN O, et al. Development of an autonomous electric robot implement for intra-row weeding in vineyards[J]. Agriculture, 2019, 9(18): 1-12. |
| 48 | 张梦娇. 基于双目视觉技术的果园割草机避障系统设计[D]. 保定: 河北农业大学, 2019. |
| ZHANG M. Design of obstacle avoidance system of orchard lawn mower based on binocular vision technology[D]. Baoding: Hebei Agricultural University, 2019. | |
| 49 | 冯吉. 基于机器视觉和激光雷达的割草机前方障碍物检测[D]. 保定: 河北农业大学, 2020. |
| FENG J. Obstacle detection in front of mower based on machine vision and LiDAR[D]. Baoding: Hebei Agricultural University, 2020. | |
| 50 | 徐雄飞. 果园生草技术[J]. 安徽农学通报, 2022, 28(3): 69-70, 78. |
| XU X. Grass-growing techniques in orchards[J]. Anhui Agricultural Science Bulletin, 2022, 28(3): 69-70, 78. | |
| 51 | LI Y, AL-SARAYREH M, IRIE K, et al. Identification of weeds based on hyperspectral imaging and machine learning[J]. Frontiers in Plant Science, 2021, 11(61): 1-13. |
| 52 | ESPEJO-GARCIA B, MYLONAS N, ATHANASAKOS L, et al. Towards weeds identification assistance through transfer learning[J]. Computers and Electronics in Agriculture, 2020, 171: 1-10. |
| 53 | RAJA R, SLAUGHTER D C, FENNIMORE S A, et al. Crop signalling: A novel crop recognition technique for robotic weed control[J]. Biosystems Engineering, 2019, 187: 278-291. |
| 54 | 赵辉, 曹宇航, 岳有军, 等. 基于改进DenseNet的田间杂草识别[J]. 农业工程学报, 2021, 37(18): 136-142. |
| ZHAO H, CAO Y, YUE Y, et al. Improved DenseNet-based weed identification in the field[J]. Transactions of the CSAE, 2021, 37(18): 136-142. | |
| 55 | 徐艳蕾, 何润, 翟钰婷, 等. 基于轻量卷积网络的田间自然环境杂草识别方法[J]. 吉林大学学报(工学版), 2021, 51(6): 2304-2312. |
| XU Y, HE R, ZHAI Y, et al. Weed identification method based on deep transfer learning in field natural environment[J]. Journal of Jilin University (Engineering), 2021, 51(6): 2304-2312. | |
| 56 | 林芬芳, 张东彦, 王秀, 等. 基于偏振光谱的叶片尺度下玉米与杂草识别研究(英文)[J]. 红外与激光工程, 2016, 45(12): 361-370. |
| LIN F, ZHANG D, WANG X, et al. Identification of corn and weeds on the leaf scale using polarization spectroscopy[J]. Infrared and Laser Engineering, 2016, 45(12): 361-370. | |
| 57 | 李开敬, 许燕, 周建平, 等. 基于Faster R-CNN和数据增强的棉田苗期杂草识别方法[J]. 新疆大学学报(自然科学版)(中英文), 2021, 38(4): 450-456. |
| LI K, XU Y, ZHOU J, et al. Cotton field seedling weed identification method based on Faster R-CNN and data enhancement[J]. Journal of Xinjiang University (Natural Science Edition in Chinese and English), 2021, 38(4): 450-456. | |
| 58 | 许燕, 温德圣, 周建平, 等. 基于Faster R-CNN的新疆棉花幼苗与杂草识别方法[J]. 排灌机械工程学报, 2021, 39(6): 602-607. |
| XU Y, WEN D, ZHOU J, et al. Identification method of cotton seedlings and weeds in Xinjiang based on Faster R-CNN[J]. Journal of Drainage and Irrigation Machinery Engineering, 2021, 39(6): 602-607. | |
| 59 | 傅雷扬, 李绍稳, 张乐, 等. 田间除草机器人研究进展综述[J]. 机器人, 2021, 43(6): 751-768. |
| FU L, LI S, ZHANG L, et al. Research progress on field weeding robots: A review[J]. Robot, 2021, 43(6): 751-768. | |
| 60 | LOTTES P, STACHNISS C. Semi-supervised online visual crop and weed classification in precision farming exploiting plant arrangement[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(iros). Piscataway, New York, USA: IEEE, 2017: 5155-5161. |
| 61 | 苗中华, 余孝有, 徐美红, 等. 基于图像处理多算法融合的杂草检测方法及试验[J]. 智慧农业(中英文), 2020, 2(4): 103-115. |
| MIAO Z, YU X, XU M, et al. Weed detection method and experiment based on multi-algorithm fusion for image processing[J]. Smart Agriculture, 2020, 2(4): 103-115. | |
| 62 | WU Z, CHEN Y, ZHAO B, et al. Review of weed detection methods based on computer vision[J]. Sensors, 2021, 21(11): 1-23. |
| 63 | 杨鹏程. 果园株间除草机械臂的设计与控制研究[D]. 南京: 江苏大学, 2021. |
| YANG P. Design and control of a robotic arm for inter-plant weeding in orchards[D]. Nanjing: Jiangsu University, 2021. | |
| 64 | O'DOGHERTY M J, GODWIN R J, DEDOUSIS A P, et al. A mathematical model of the kinematics of a rotating disc for inter- and intra-row hoeing[J]. Biosystems Engineering, 2007, 96(2): 169-179. |
| 65 | MELANDER B. Optimization of the adjustment of a vertical axis rotary brush weeder for intra-row weed control in row crops[J]. Journal of Agricultural Engineering Research, 1997, 68: 39-50. |
| 66 | DUERINCKX K, MOUAZEN A M, ANTHONIS J, et al. Effects of spring-tine settings and operational conditions on the mechanical performance of a weed harrow tine[J]. Biosystems Engineering, 2005, 91(1): 21-34. |
| 67 | 邢钦淞, 丁素明, 薛新宇, 等. 智能田间除草机器人发展现状研究[J]. 中国农机化学报, 2022, 43(8): 173-181. |
| XING Q, DING S, XUE X, et al. Research on development status of intelligent field weeding robot [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(8): 173-181. | |
| 68 | 王洪昌. 基于鼢鼠爪趾几何结构特征的苗间仿生除草铲设计[D]. 长春: 吉林大学, 2015. |
| WANG H. Design of intra-row bionic weeding blade based on geometric characteristic of claws of myospalax[D]. Changchun: Jilin University, 2015. | |
| 69 | 闫东伟. 基于水射流的水田仿生中耕除草装置机理与试验研究[D]. 哈尔滨: 东北农业大学, 2021. |
| YAN D. Mechanism and experimental study on bionic weeding device for paddy field based on water jet[D]. Harbin: Northeast Agricultural University, 2021. | |
| 70 | 权龙哲, 张景禹, 姜伟, 等. 基于玉米根系保护的株间除草机器人系统设计与试验[J]. 农业机械学报, 2021, 52(12): 115-123. |
| QUAN L, ZHANG J, JIANG W, et al. Development and experiment of intra-row weeding robot system based on protection of maize root system[J]. Transactions of the CSAM, 2021, 52(12): 115-123. | |
| 71 | SILWAL A, KARKEE M, ZHANG Q. A hierarchical approach to apple identification for robotic harvesting[J]. Transactions of the ASABE, 2016, 59(5): 1079-1086. |
| 72 | D'ESNON A . G. Robotic harvesting of apples [C]//Agri-Mation 1 Conference and Exposition. Chicago, USA: ASAE, 1985: 210-214 |
| 73 | KONDO N, TING K C. Robotics for bioproduction systems[M]. Washington: American Society of Agricultural Engineers, 1998: 5-98. |
| 74 | BU L, CHEN C, HUI G, et al. Technological development of robotic apple harvesters: A review[J]. INMATEH-Agricultural Engineering, 2020, 61(2): 151-164. |
| 75 | PETERSON D L, WOLFORD S D. Fresh market quality tree fruit harvester part II: Apples[J]. Applied Engineering in Agriculture, 2003, 19(5): 545-548. |
| 76 | ZHANG Z, HEINEMANN P H, SCHUPP J R, et al. Design and field test of a low-cost apple harvest-assist unit[J]. Transactions of the ASABE, 2016, 59: 1149-1156. |
| 77 | TIAN Y, YANG G, WANG Z, et al. Apple detection during different growth stages in orchards using the improved YOLO-V3 model[J]. Computers and Electronics in Agriculture, 2019, 157: 417-426. |
| 78 | ZHANG Z, IGATHINATHANE C, LI J, et al. Technology progress in mechanical harvest of fresh market apples[J]. Computers and Electronics in Agriculture, 2020, 175: 1-13. |
| 79 | LU Y, LU R. Detection of surface and subsurface defects of apples using structured- illumination reflectance imaging with machine learning algorithms[J]. Transactions of the ASABE, 2018, 61(6): 1831-1842. |
| 80 | YAN B, FAN P, LEI X, et al. A real-time apple targets detection method for picking robot based on improved YOLOv5[J]. Remote Sensing, 2021, 13(1619): 1-23. |
| 81 | 李赫. 基于深度学习的多目标识别和定位研究[D]. 秦皇岛: 燕山大学, 2021. |
| LI H. Multi-target recognition and location based on deep learning[D]. Qinhuangdao: Yanshan University, 2021. | |
| 82 | 张世福. 基于深度学习的苹果目标识别与定位算法研究[D]. 杭州: 浙江工业大学, 2020. |
| ZHANG S. Research on apple target recognition and location algorithm based on deep learning[D]. Hangzhou: Zhejiang University of Technology, 2020. | |
| 83 | 田博凯.基于深度学习的复杂环境下苹果检测分类与定位技术研究[D]. 天津: 天津理工大学, 2020. |
| TIAN B. Research on apple detection classification and location technology in complex environment based on deep learning[D]. Tianjin: Tianjin University of Technology, 2020. | |
| 84 | 金保华, 殷长魁, 张卫正, 等. 基于机器视觉的苹果园果实识别研究综述[J]. 轻工学报, 2019, 34(2): 71-81. |
| JIN B, YIN C, ZHANG W, et al. Review on apple garden fruit recognition based on machine vision[J]. Journal of Light Industry, 2019, 34(2): 71-81. | |
| 85 | ZHANG X, HE L, ZHANG J, et al. Determination of key canopy parameters for mass mechanical apple harvesting using supervised machine learning and principal component analysis (PCA)[J]. Biosystems Engineering, 2020, 193: 247-263. |
| 86 | DONG W, ROY P, ISLER V. Semantic mapping for orchard environments by merging two-sides reconstructions of tree rows[J]. Journal of Field Robotics, 2020, 37: 97-121. |
| 87 | LIN G, TANG Y, ZOU X, et al. Color‑, depth‑, and shape‑based 3D fruit detection[J]. Precision Agriculture, 2020, 21: 1-17. |
| 88 | GENÉ-MOLA J, VILAPLANA V, ROSELL-POLO J R, et al. Multi-modal deep learning for Fuji apple detection using RGB-D cameras and their radiometric capabilities[J]. Computers and Electronics in Agriculture, 2019, 162: 689-698. |
| 89 | 夏雪, 孙琦鑫, 侍啸, 等. 基于轻量级无锚点深度卷积神经网络的树上苹果检测模型[J]. 智慧农业(中英文), 2020, 2(1): 99-110. |
| XIA X, SUN Q, SHI X, et al. Apple detection model based on lightweight anchor-free deep convolutional neural network[J]. Smart Agriculture, 2020, 2(1): 99-110. | |
| 90 | WAN S, GOUDOS S. Faster R-CNN for multi-class fruit detection using a robotic vision system[J]. Computer Networks, 2020, 168: 1-6. |
| 91 | KUZNETSOVA A, MALEVA T, SOLOVIEV V. Using YOLOv3 Algorithm with pre- and post-processing for apple detection in fruit-harvesting robot[J]. Agronomy, 2020, 10(7): ID 1016. |
| 92 | KOIRALA A, WALSH K B, WANG Z, et al. Deep learning-Method overview and review of use for fruit detection and yield estimation[J]. Computers and Electronics in Agriculture, 2019, 162: 219-234. |
| 93 | FAN P, LANG G, YAN B, et al. A method of segmenting apples based on gray-centered RGB color space[J]. Remote Sensing, 2021, 13(1211): 1-17. |
| 94 | ZHANG W, CHEN K, WANG J, et al. Easy domain adaptation method for filling the species gap in deep learning-based fruit detection[J]. Horticulture Research, 2021, 8(119): 1-13. |
| 95 | 王丹丹, 宋怀波, 何东健. 苹果采摘机器人视觉系统研究进展[J]. 农业工程学报, 2017, 33(10): 59-69. |
| WANG D, SONG H, HE D. Research advance on vision system of apple picking robot[J]. Transactions of the CSAE, 2017, 33(10): 59-69. | |
| 96 | PARRISH E A, GOKSEL A KJR. Pictorial pattern recognition applied to fruit harvesting[J]. Transactions of the ASAE, 1977, 20(5): 822-827. |
| 97 | FENG J, WANG S, LIU G, et al. A separating method of adjacent apples based on machine vision and chain code information[C]// International Conference on Computer and Computing Technologies in Agriculture. Berlin, German: Heidelberg Springer, 2012: 258-267. |
| 98 | JIAO Y, LUO R, LI Q, et al. Detection and localization of overlapped fruits application in an apple harvesting robot[J]. Electronics, 2020, 9(1023): 1-14. |
| 99 | 江梅, 孙飒爽, 何东健, 等. 融合K-means聚类分割算法与凸壳原理的遮挡苹果目标识别与定位方法[J]. 智慧农业, 2019, 1(2): 45-54. |
| JIANG M, SUN S, HE D, et al. Recognition and localization method of occluded apples based on K-means cluster-ing segmentation algorithm and convex hull theory[J]. Smart Agriculture, 2019, 1(2): 45-54. | |
| 100 | LI T, FENG Q, QIU Q, et al. Occluded apple fruit detection and localization with a frustum-based point-cloud-processing approach for robotic harvesting[J]. Remote Sensing, 2022, 14(482): 1-18. |
| 101 | BAETEN J, DONN'E K, BOEDRIJ S, et al. Autonomous fruit picking machine: A robotic apple harvester[J]. Springer Tracts in Advanced Robotics, 2008, 42: 531-539. |
| 102 | JI W, MENG X, QIAN Z, et al. Branch localization method based on the skeleton feature extraction and stereo matching for apple harvesting robot[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-9. |
| 103 | HOHIMER C J. WANG H, BHUSAL S,et al. Design and field evaluation of a robot apple harvesting system with 3D printed soft-robotic end-effector[J]. Transactions of the ASABE, 2019, 62(2): 405-414. |
| 104 | SI Y. Location of apples in trees using stereoscopic vision[J]. Computers and Electronics in Agriculture, 2015, 112: 68-74. |
| 105 | JIMENEZ A R, CERES R, PONS J L. A survey of computer vision methods for locating fruit on trees[J]. Transactions of the ASAE, 2000, 43(6): 1911-1920. |
| 106 | NGUYEN T T, VANDEVOORDE K, WOUTERS N, et al. Detection of red and bicoloured apples on tree with an RGB-D camera[J]. Biosystems Engineering, 2016, 146: 33-44. |
| 107 | 卜令昕. 结构化果园苹果收获机器人关键技术研究[D]. 杨凌: 西北农林科技大学, 2021. |
| BU L. Research on key technology of structured orchard apple harvesting robot[D]. Yangling: Northwest A&F University, 2021. | |
| 108 | GONGAL A, AMATYA S, KARKEE M, et al. Sensors and systems for fruit detection and localization: A review[J]. Computers and Electronics in Agriculture, 2022, 39(3): 281-311. |
| 109 | 吴剑桥, 范圣哲, 贡亮, 等. 果蔬采摘机器手系统设计与控制技术研究现状和发展趋势[J]. 智慧农业(中英文), 2020, 2(4): 17-40. |
| WU J, FAN S, GONG L, et al. Research status and development direction of design and control technology of fruit and vegetable picking robot system[J]. Smart Agriculture, 2020, 2(4): 17-40. | |
| 110 | BULANON D M, KATAOKA T. Fruit detection system and an end effector for robotic harvesting of Fuji apples[J]. Agricultural Engineering International: CIGR Journal, 2010, 12(1): 203-210. |
| 111 | 丁一, 姬伟, 许波, 等. 苹果采摘机器人柔顺抓取的参数自整定阻抗控制[J]. 农业工程学报, 2019, 35(22): 257-266. |
| DING Y, JI W, XU B, et al. Parameter self-tuning impedance control for compliance grasp of apple harvesting robot[J]. Transactions of the CSAE, 2019, 35 (22): 257, 266. | |
| 112 | FAN P, YAN B, WANG M, et al. Three-finger grasp planning and experimental analysis of picking patterns for robotic apple harvesting[J]. Computers and Electronics in Agriculture, 2021, 188: 1-11. |
| 113 | ZHAO H, O'BRIEN K, LI S, et al. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides[J]. Science Robotics, 2016, 1(1): 1-10. |
| 114 | YAP H K, NG H Y, YEOW C H. High-force soft printable pneumatics for soft robotic applications[J]. Soft Robotics, 2016, 3(3): 144-158. |
| 115 | KHALED E, NIELS L, MICHAEL J. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach[J]. Mechatronics, 2018, 50: 234-247. |
| 116 | GLICKP, SURESHS, RUFFATTOD, et al. A soft robotic gripper with gecko-inspired adhesive[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 903-910. |
| 117 | RUS D, TOLLEY M T. Design fabrication and control of soft robots[J]. Nature, 2015, 521: 467-475. |
| 118 | 刘晓敏, 田德宝, 宋懋征, 等. 气动球果采摘柔性手爪设计与实验[J]. 农业机械学报, 2021, 52(2): 30-43. |
| LIU X, TIAN D, SONG M, et al. Design and experiment on pneumatic flexible gripper for picking globose fruit[J]. Transactions of the CSAM, 2021, 52 (2): 30-43. | |
| 119 | PARK W, SEO S, BAE J. A hybrid gripper with soft material and rigid structures[J]. IEEE Robotics and Automation Letters, 2019, 4: 65-72. |
| 120 | LIUC H, CHIUC H, CHENT L, et al. A Soft robotic gripper module with 3d printed compliant fingers for grasping fruits[C]// The 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (aim). Piscataway, New York, USA: IEEE, 2018: 736-741. |
| 121 | HOHIMER C J, WANG H, BHUSAL S, et al. Design and field evaluation of a robotic apple harvesting system with a 3D-printed soft-robotic end-effector[J]. Transactions of the ASABE, 2018, 62(2): 405-414. |
| 122 | 李铁风, 李国瑞, 梁艺鸣, 等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报, 2016, 48(4): 756-766. |
| LI T, LI G, LIANG Y, et al. Review of materials and structures in soft robotics[J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48 (4): 756-766. | |
| 123 | CHEN X, ZHANG X, HUANG Y, et al. A review of soft manipulator research applications and opportunities[J]. Journal of Field Robotics, 2022, 39(3): 281-311. |
| 124 | GRAZIOSO S, GIRONIMO G D, SICILIANO B. A geometrically exact model for soft continuum robots: The finite element deformation space formulation[J]. Soft Robotics, 2019, 6(6): 790-811. |
| 125 | RENDA F, GIORELLI M, CALISTI M, et al. Dynamic model of a multibending soft robot arm driven by cables[J]. IEEE Transactions on Robotics, 2014, 30(5): 1109-1122. |
| 126 | CHEN X, ZHANG X, LIU H, et al. Design and development of a soft robotic manipulator[J]. International Journal of Mechanics and Materials in Design, 2020, 16: 309-321. |
| 127 | WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: A review[J]. The International Journal of Robotics Research, 2010, 29(13): 1661-1683. |
| 128 | NASELLI G A, MAZZOLAI Barbara. The softness distribution index: Towards the creation of guidelines for the modeling of soft‐bodied robots[J]. The International Journal of Robotics Research, 2021, 40(1): 197-223. |
| 129 | MURRAY R M, DENO D C, PISTER K S J, et al. Control primitives for robot systems[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1992, 22(1): 183-193. |
| [1] | 王剑, 赵浩森, 马越, 邢斌, 朱文颖. 设施蔬菜智能管控技术研究进展与展望[J]. 智慧农业(中英文), 2026, 8(1): 104-119. |
| [2] | 王政, 宋怀波, 王云飞, 华志新, 李嵘, 许兴时. 奶牛运动行为智能监测研究进展与技术趋势[J]. 智慧农业(中英文), 2022, 4(2): 36-52. |
| [3] | 王春雷, 李洪文, 何进, 王庆杰, 卢彩云, 陈立平. 自动导航与测控技术在保护性耕作中的应用现状和展望[J]. 智慧农业(中英文), 2020, 2(4): 41-55. |
| [4] | 赵春江. 智慧农业发展现状及战略目标研究[J]. 智慧农业(中英文), 2019, 1(1): 1-7. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||







