• •
杨文彩, 陈洪坤, 赵恒亮, 朱龙图( ), 尚小标, 张宏扬, 甄广琦
), 尚小标, 张宏扬, 甄广琦
收稿日期:2025-08-25
出版日期:2026-03-30
基金项目:作者简介:杨文彩,博士,教授,研究方向为农业机械化及智能装备工程、丘陵山区农业机械化模式。E-mail: yangwencai2005@126.com
通信作者:
YANG Wencai, CHEN Hongkun, ZHAO Hengliang, ZHU Longtu(), SHANG Xiaobiao, ZHANG Hongyang, ZHEN Guangqi
Received:2025-08-25
Online:2026-03-30
Foundation items:the National Natural Science Foundation of China(52565029); the Major Science and Technology Project of Yunnan Province(202502AE090042); the Key Research and Development Program of Yunnan Province(202503AS090010); the Industrial Innovation Talent Project of the "Xingdian Talent Support Program" of Yunnan Province(XDYC-XYCX-2022-0012); the Academician (Expert) Workstation Project of Yunnan Province(202605AF350074); the Yunnan Provincial Department of Education Scientific Research Fund Project(2024Y318)
About author:YANG Wencai, E-mail: yangwencai2005@126.com
Corresponding author:摘要:
【目的/意义】 传统农业机械难以适应丘陵山区复杂地形,底盘调平作为提升农机地形适应性与作业质量的关键技术,已成为国内农机装备研究热点。 【进展】 本文围绕底盘调平评价指标、调平装置、调平控制系统等方面进行全面梳理,着重分析了3点支撑式与4点支撑式两类调平机构原理、性能特点及适用场景,阐述了角度误差控制法与位置误差控制法的技术特征,归纳了姿态检测、位移测量、载荷监测及地形感知等多源信息融合方案,综述了从传统比例-积分-微分控制到模糊控制、滑模控制、神经网络等智能算法的演进路径,并提出了丘陵山区未来应重点开展的研究方向。 【结论/展望 融合农艺的调平机理与评价体系构建、高可靠性通用底盘调平装置研发、基于多传感器融合的智能协同调整控制系统开发、“虚腿”抑制与低成本调平技术工程化验证,以期为中国丘陵山区先进适用农机装备研发提供借鉴参考。
中图分类号:
杨文彩, 陈洪坤, 赵恒亮, 朱龙图, 尚小标, 张宏扬, 甄广琦. 农业机械底盘调平技术研究现状与展望[J]. 智慧农业(中英文), doi: 10.12133/j.smartag.SA202512012.
YANG Wencai, CHEN Hongkun, ZHAO Hengliang, ZHU Longtu, SHANG Xiaobiao, ZHANG Hongyang, ZHEN Guangqi. Research Status and Prospects of Chassis Leveling Technology in Agricultural Machinery[J]. Smart Agriculture, doi: 10.12133/j.smartag.SA202512012.
表1
农业机械典型3点支撑式底盘调平装置对比
| 装置类型 | 研发机构 | 装置图 | 调平原理 | 适用场景 |
|---|---|---|---|---|
| 侧向调平机构 | 伊朗科技大学[ | | 通过液压缸调节车体绕底盘传动侧倾中心轴旋转,在保持动力传动功能的同时调整车辆质心位置,从而实现车体姿态调平 | 轮式拖拉机;平缓丘陵地 |
| 广东省现代农业装备研究所等[ | | 在活动架与固定架之间增加侧向调平液压缸实现横向±12°调平 | 果园作业;平缓丘陵地 | |
| 液压差高机构 | 西北农林科技大学等[ | | 通过远程遥控液压缸伸出长度,调节两侧相对平行的支撑架,使车桥与车架姿态同步调整,快速实现在0°~23°坡地作业时的横向调平和离地间隙调整 | 履带式拖拉机;平缓坡地等高线作业 |
| 山东大学等[ | | 通过左右支撑架升降液压缸,在4 s内实现车身在坡度±10°的横向调平 | 马铃薯联合收获机;平缓丘陵地 | |
| 双导柱机构 | 北京林业大学[ | | 通过调节两液压缸同时伸缩或一缩一伸,实现在20°坡度条件下的全向调平作业 | 平缓坡地 |
| 山东理工大学等[ | | 前轮采用被动减震技术,后轮采用双导柱式伺服电缸,降低高频扰动影响的同时实现底盘在±0.2°精度、±9°范围内的全向调平 | 平缓丘陵地;动态调平 | |
| 左右传动摇臂机构 | 山东工业大学;歌尔股份有限公司等[ | | 在保证动力传输的基础上,通过控制左右传动摇臂机构实现横向高度差调节,可在6 s内完成±0.3°精度、-16.34°~16.12°的横向姿态调整 | 小型轮式玉米收获机;陡峭丘陵地 |
| 双平行四边形机构 | 四川农业大学;德阳金星农业机械制造有限公司等[ | | 通过液压缸伸缩,对后摆臂施加压力,使摆臂绕支撑底座做旋转运动,改变底盘上下两段的相对距离,实现在±7.5°倾斜角度下底盘的横向调平,调平时间和角度偏差分别控制在3.6 s和±0.4°以内 | 水稻联合收割机;动态调平;平缓丘陵地 |
| 双平行4杆机构(前轮)+左右偏心轮摆动机构(后轮) | 上海交通大学;山东五征集团[ | | 前轮通过双平行4杆机构,在实现转向和动力传输功能的同时,根据路面起伏和后桥姿态绕前桥托架左右摆动,保持始终与地面的垂直;后轮通过蜗轮蜗杆装置驱动偏心轮顺时针或逆时针摆动,调节左右车轮高度,兼顾动力传输,在±15.79°丘陵地上实现车身刚性结构的柔性动态横向调整 | 轮式拖拉机;陡峭丘陵地;动态调平 |
| 双对称平行4杆机构(前轮)+滑块摇杆机构(后轮) | 吉林大学[ | | 通过平行4杆机构使上底盘架前端抬升和下降,实现±17.5°的车身左右横向调平;通过滑块摇杆机构完成上底盘架后端的抬升和下降,实现最大角度分别为17.5°和11°的前倾和后倾调平 | 自走轮式玉米收获机;陡峭丘陵地 |
| 燕山大学等[ | | 在后轮采用对称双轮胎结构实现仿形行走的同时,通过液压缸调节双对称平行4杆机构和滑块摇杆机构各支撑点高度,实现车身姿态全向调平及离地间隙调整 | 陡峭丘陵地 | |
| 曲柄+滚珠滑块机构 | 日本久保田株式会社[ | | 通过控制升降机构调节单侧履带底盘高度,以补偿机身的横向倾斜,保持清选装置水平,避免清选物在倾斜状态下单侧堆积 | 履带式全喂入式联合收割机;平缓丘陵地 |
| 日本洋马农机株式会社[ | | 通过液压缸控制履带底盘左右平衡机构独立升降13 cm,在湿烂田块作业时克服机体倾斜,保持机体与割台水平 | 履带式全喂入联合收割机;平缓丘陵地 | |
| 广西大学;广西民族大学等[ | | 通过左右对称布置的底盘调平机构,可有效改变整机质心,实现横向姿态调整,调平精度≤0.5°,调平时间1 s,最大调平角10° | 履带式甘蔗收获机;平缓丘陵地 |
表2
农业机械典型4点支撑式底盘调平装置对比
| 装置类型 | 研发机构 | 装置图 | 调平原理 | 适用场景 |
|---|---|---|---|---|
| 自适应平衡摇臂悬架机构 | 北京航空航天大学等[ | | 在车轮仿形行走的同时,摇臂悬架通过手动控制或依靠自重作用,实现离地间隙调节、轮距调节和车身自调平功能 | 轮式拖拉机;平缓坡地 |
| 4点液压升降机构 | 石河子大学[ | | 通过4个对称分布的液压缸调整底盘机架横梁实现0°~17°的横向调平 | 自走轮式番茄收获机;陡峭丘陵地 |
| 中国铁建重工集团新疆有限公司[ | | 通过控制4液压缸伸缩可实现在0°~10°坡地上的横向调平 | 番茄收获机;平缓丘陵地 | |
| 平面连杆双向调节机构 | 华南农业大学等[ | | 根据1条直线和直线外的1点唯一确定1个平面的原则,可实现坡度20°以内的全向调平作业 | 履带式果园作业;平缓坡地 |
| 可调悬架悬臂机构 | 中国农业大学等[ | | 通过倾角传感器实时测量车身倾斜角度,计算4组悬架悬臂夹角的瞬时调节量并精确调整,可实现底盘最大侧倾角和俯仰角为22.71°和15.58°,精度1°范围内的动态补偿调平 | 平缓坡地;动态调平 |
| 平行4杆机构 | 湖南农业大学等[ | | 通过液压缸驱动、平行4杆机构执行升降,完成离地间隙调节和机身调平 | 高地隙轮式植保作业;平缓丘陵地 |
| 平行4杆机构(横向)+双车架机构(纵向) | 西北农林科技大学等[ | | 通过横向调平液压缸改变平行四边形形状,实现0°~15°丘陵地的横向姿态调整,同时优化整机离地间隙;由纵向调平液压缸驱动,带动上层车架绕下层车架后桥半轴旋转一定角度,实现0°~10°丘陵地的纵向姿态调整 | 履带式拖拉机;陡峭丘陵地;动态调平 |
| 绕轴旋转机构 | 北京林业大学;中国农业大学等[ | | 通过液压调平系统协调4个对称分布的液压缸伸缩,实现机架绕其中心轴旋转完成±8°的侧倾调平;通过控制双液压缸同步伸缩,使工作台绕剪叉机构顶端支撑轴旋转完成±10°的俯仰调平,但当工作台升至最高点时,仰调平角度降至6.5° | 履带式果园作业;平缓丘陵地 |
| 4点导柱升降机构 | 法国克莱蒙大学等[ | | 通过4轮独立液压调平机构调整车身倾斜状态,实现车身在0°~10°的全向调平,并动态检测车身横向载荷和实时坡度 | 平缓丘陵地 |
| 吉林大学等[ | | 采用调平液压缸与锥齿轮副组成的4点导柱升降机构,在保持动力输出的同时,实现在复杂工况下0°~15°的车身动态横向调平 | 轮式拖拉机;陡峭丘陵地;动态调平 | |
| 湖南农业大学[ | | 通过独立控制调节4气囊气压可在5.35 s内实现±8.5°俯仰调平、±10°横向调平及0~280 mm离地间隙调节,倾斜度调节误差最大值为0.44° | 高地隙轮式植保作业;平缓丘陵地 | |
| 铰接“3层车架”机构 | 江苏大学;江苏新能源汽车研究院有限公司[ | | 通过液压缸的伸缩分别控制横向和纵向调平层,使其上方车架绕铰接点旋转,分别在3.4 s和3.6 s内实现机身横向20°,纵向25°调平,精度达±1.5° | 履带式作业机;平缓坡地;动态调平 |
| Y形可调悬架机构 | 中国农业大学[ | | 通过协调调节4组Y形可调悬架的高度,实现底盘姿态±0.5°精度内的自适应仿形调平补偿 | 平缓丘陵地;动态调平 |
| 西南大学等[ | | 通过控制4电动推杆的伸缩实现±8°的全向调平 | 轮式辣椒苗移栽机;平缓丘陵地 | |
| 江苏大学[ | | 通过采集倾角信息,控制轮毂电机驱动实现行走,驱动电缸实现姿态调平 | 轮式果园作业;平缓丘陵地 | |
| 变幅轮腿机构+3自由度铰接体机构 | 福建农林大学;北京林业大学[ | | 通过3自由度铰接体机构和对称分布的4变幅轮腿可在坡面倾角小于15.29°时调节车架实现横向调平 | 陡峭丘陵地 |
| 仿生昆虫后足多连杆机构 | 中国农业大学等[ | | 基于仿生昆虫后足和多连杆机构原理,构建全向调平装置,实现0°~16°的俯仰调平、0°~27°的侧倾调平和0~574 mm的离地间隙调整,平均调平时间约为1.2 s,平均调平误差为0.8° | 陡峭坡地 |
| 4液压缸调平机构 | 美国约翰迪尔公司;凯斯公司[ | | 美国John Deere公司生产的S系列联合收割机和Case-IH公司生产的CH、CS系列联合收割机配备Hillco Technologies山坡调平系统,能够通过斜率感应测角仪实时监测机身倾斜状况,实现快速、平稳的27%斜率补偿,精度可达±0.5° | 联合收割机;平缓丘陵地;动态调平 |
| 美国麦赛福格森公司[ | | 美国Massey Ferguson公司生产的MF Beta AL4型联合收割机采用由4个液压缸驱动的调平系统,上下坡补偿分别达35%和8%斜率,横向坡度补偿高达38%斜率 | 联合收割机;平缓坡地;动态调平 | |
| 德国芬特公司[ | | 德国Fendt公司生产的5275 C SL型联合收割机通过配备4液压缸调平系统,可提供上坡35%、下坡8%及横向38%的斜率补偿 | 联合收割机;平缓坡地;动态调平 | |
| 德国科乐收公司[ | | 德国CLAAS公司生产的LEXION 7700 MONTANA型联合收割机配备全自动边坡补偿功能,横向补偿能力最高可达18%,纵向补偿能力最高可达6% | 联合收割机;平缓丘陵地;动态调平 | |
| 铰链多连杆机构 | 南京农业机械化研究所;山东理工大学[ | | 通过电液控制系统控制双曲柄铰链5杆机构,完成底盘双侧升降,实现纵向-5°~7°、横向±6.5°、离地间隙0~130 mm的姿态调整,平均调节时间4.2 s,倾斜度调节误差最大值为0.67° | 履带式联合收获机;平缓丘陵地;动态调平 |
| 江苏大学;沃德农业机械股份有限公司等[ | | 4点可调式升降机构对称分布于底盘左右两侧,通过液压缸调节离地间隙、横向倾角和纵向倾角,其中离地间隙调节范围为0~140 mm,横向倾角和纵向倾角的调节范围分别为-5.18°~5.55°和-4.06°~5.2°,调平精度达±0.4° | 履带式联合收割机;平缓丘陵地 | |
| 双4连杆机构(横向)+4升降机构(纵向) | 甘肃省机械科学研究院有限责任公司等[ | | 在液压驱动下,调整液压缸带动4连杆悬架,实现0°~15°的横向调平;通过4升降液压缸共同抬起或推低机架,使前后侧升降液压缸组形成一定的高度差,实现0°~30°的纵向调平 | 陡峭丘陵地 |
| 双层悬架机构(横向)+铰链杆块机构(纵向) | 吉林大学;长春中达拖拉机制造有限公司[ | | 由上下两级调平机构组成,通过液压缸伸缩控制调平盘和上悬架转动,形成高度差,分别实现±43.1°横向与-10°~17°纵向姿态的独立调平,最快调平速率可达0.233 s/(°),调平均方根误差为±0.78° | 履带式玉米收获机;陡峭坡地 |
| 顶升机构 | 印度理工学院[ | | 通过液压缸顶起或放下举升机构实现0~245 mm的离地间隙调节和±15.2°的车身侧倾调平 | 履带式联合收获机;平缓丘陵地 |
| 轮毂调平机构 | 浙江理工大学等[ | | 通过伺服电机的转动适应不同垄高及0°~12°的不平地块,并在9.1 s内完成调平,实现单侧上垄的移栽作业 | 设施蔬菜移栽机;平缓丘陵地 |
| 伸缩机构+偏转机构 | 西北农林科技大学等[ | | 采用自适应机构保持作业机具方向稳定,并通过调整支腿和旋转偏转机构,减少控制件个数,降低控制难度,在2.5 s内实现调平精度达2.2°、适应0°~20°的全向调平 | 履带式山地茶园作业;陡峭丘陵地;动态调平 |
图1
姿态传感器典型安装示意图
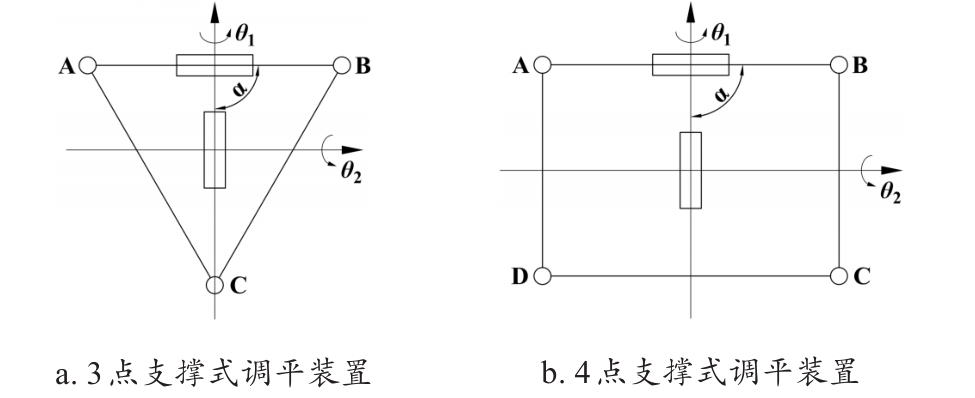
表3
不同类型调平传感器的主要功能、安装位置和精度
| 调平传感器类型 | 主要功能 | 安装位置 | 精度 |
|---|---|---|---|
| 姿态检测传感器 | 实时获取侧倾角与俯仰角等姿态信息 | 底盘中心或关键支撑点 | 0.01°~0.1° |
| 位移传感器 | 测量支腿/液压缸伸缩量,反馈执行状态 | 支腿伸缩机构或液压缸 | 0.05~1 mm |
| 载荷检测传感器 | 监测支撑载荷分布,识别并抑制“虚腿” | 支腿或液压缸支撑部位 | 0.05%~0.5% Full Scale (F.S) |
| 地形测量传感器 | 感知前方地形变化,实现主动调平 | 底盘顶部或底部 | 1~10 mm |
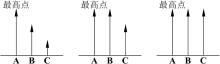
图2
采用“最高点”不动调平法的3点支撑调平过程 a. 调平前 b. 调平中 c. 调平后

图3
采用“最高点”不动调平法的4点支撑调平过程 a. 确定最高点 b. A点完成调平 c. C点完成调平 d. D点完成调平
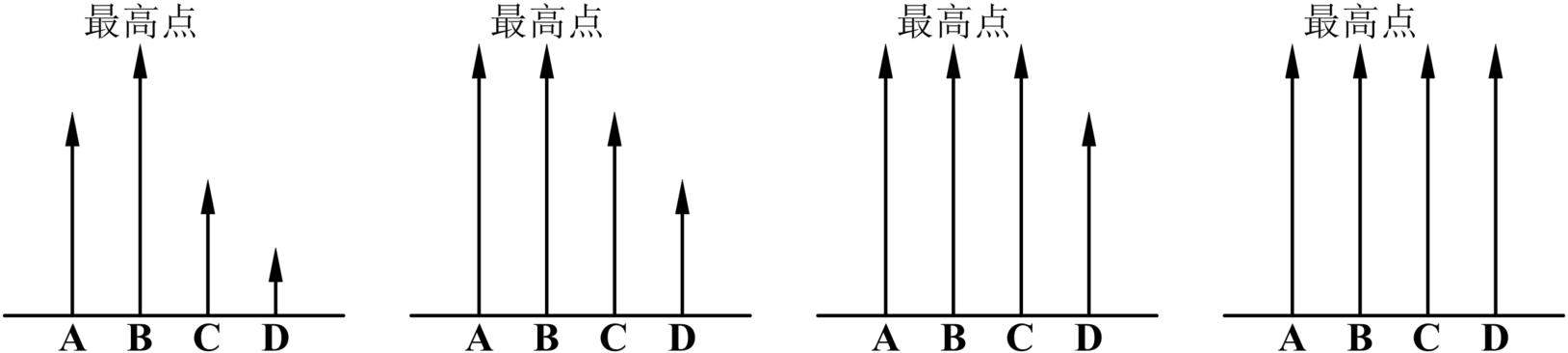
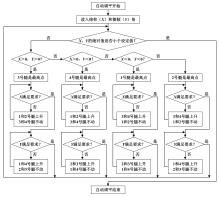
图4
基于“最高点”不动调平法的4点支撑式自动调平控制系统调平流程图[88]
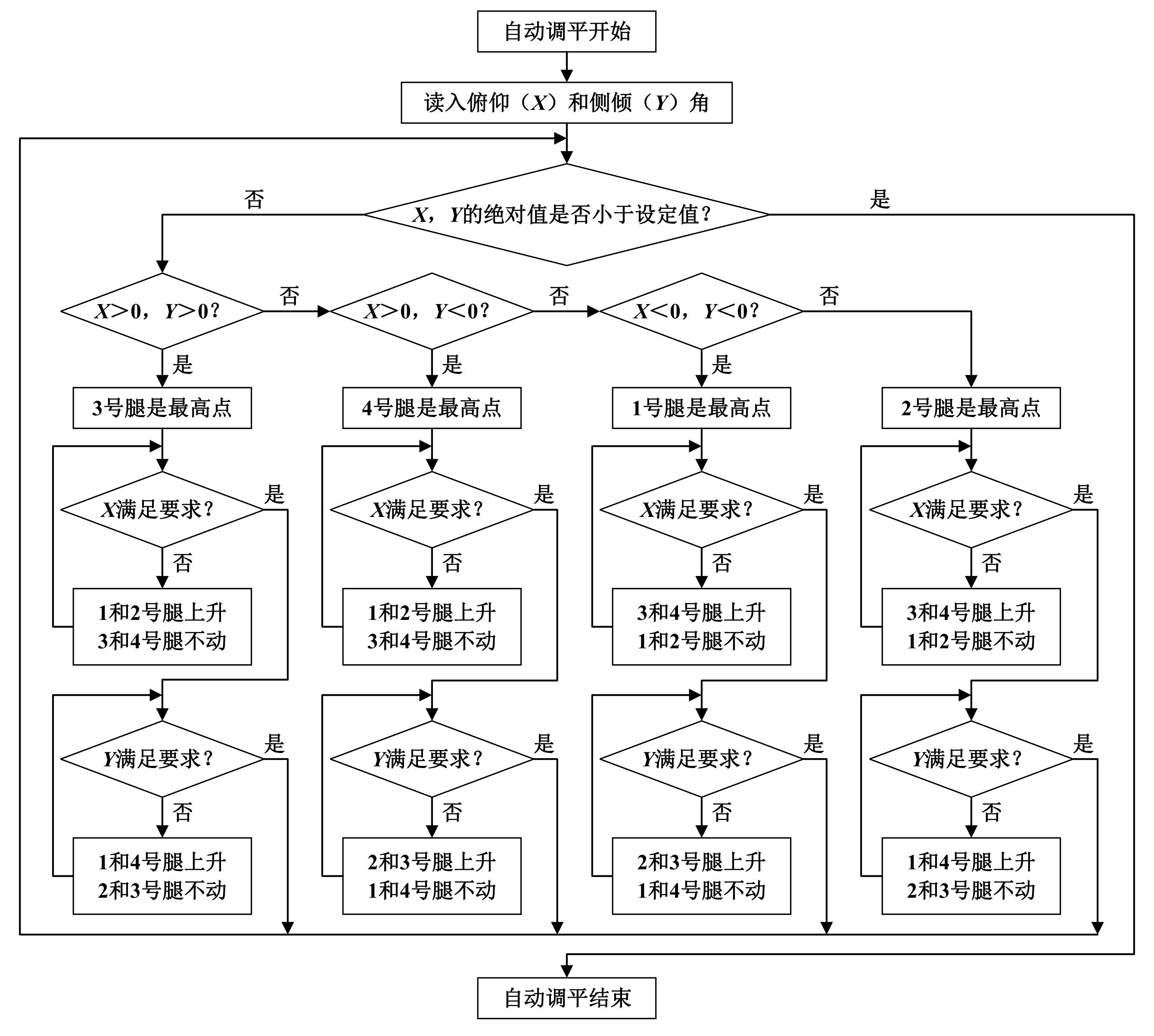

图5
“面追逐式”误差控制调平法基本思路 a. 调平前位置误差分配 b. 同步调整
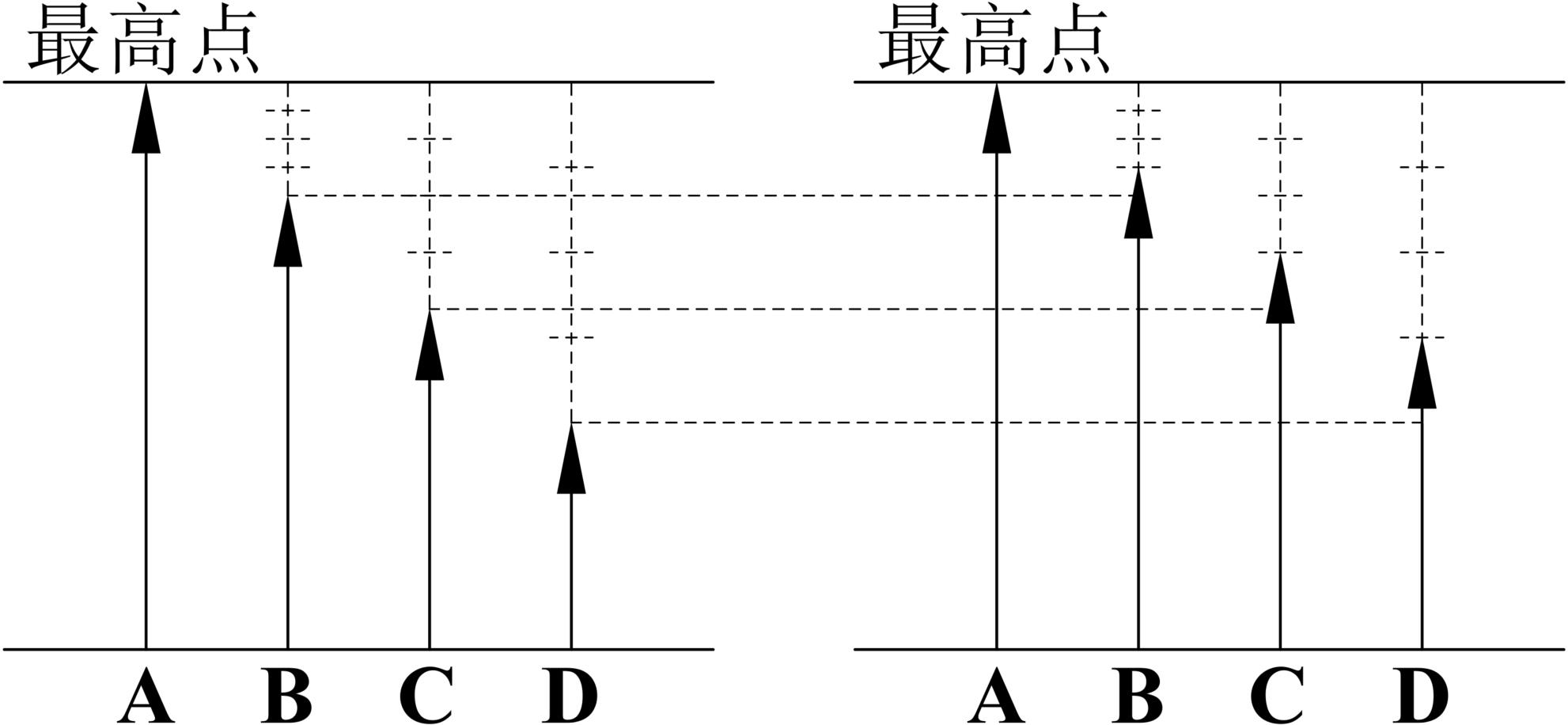
表4
农业机械底盘不同位置误差控制调平法对比
| 位置误差控制调平法 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|
| “中心点”不动调平法 | 重心变化小、调平行程短、调平时间短、调平余量充足 | 对初始姿态敏感 | 动态行走作业 |
| “最高点”不动调平法 | 只升不降、可抑制“虚腿” | 调平时间长、调平余量逐步减少、重心升高 | 高地隙作业机械 |
| “最低点”不动调平法 | 重心降低、稳定性与抗侧倾能力强 | 影响通过性、调平时间较长 | 稳定性优先场景 |
表5
农业机械底盘调平控制策略对比
| 调平控制策略 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|
| 角度误差控制调平法 | 算法结构简单、响应速度快、控制精度高 | 多方向角度耦合,需多次迭代调整、调平时间较长、传感器精度要求高、载荷不均时易诱发“虚腿” | 动态调平 |
| 位置误差控制调平法 | 支腿位置调节精确、调平次数少、调平时间较短 | 计算和控制逻辑复杂、响应速度较慢、载荷分布不均时仍可能出现“虚腿” | 静态调平或动静态兼顾 |
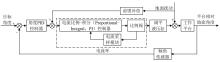
图6
果园作业平台前馈PID自动调平控制流程图[95]
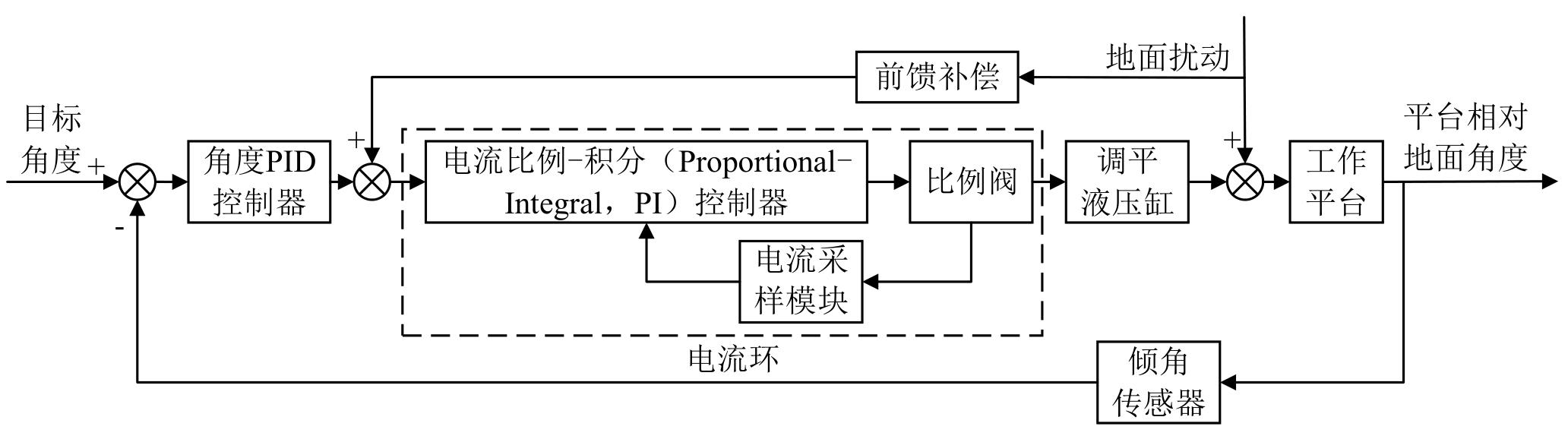
图7
履带式联合收获机底盘调平系统控制框图[96]
图8
马铃薯联合收获机模糊PID车身调平系统结构图[27]
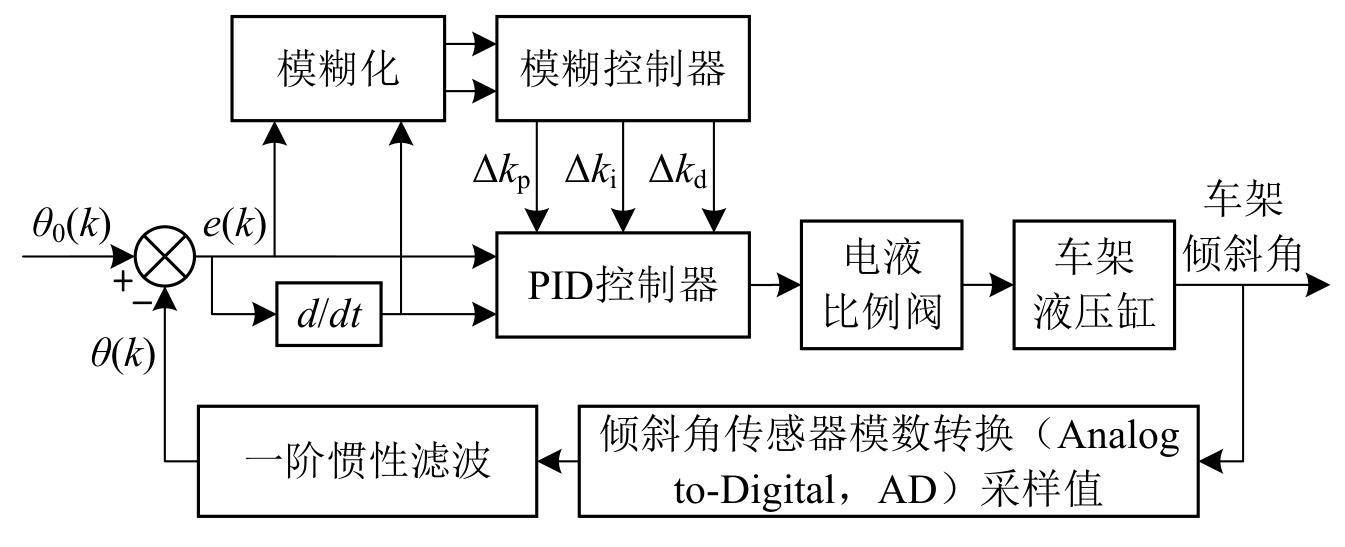
图9
丘陵山地拖拉机姿态主动调整控制系统原理图[34]
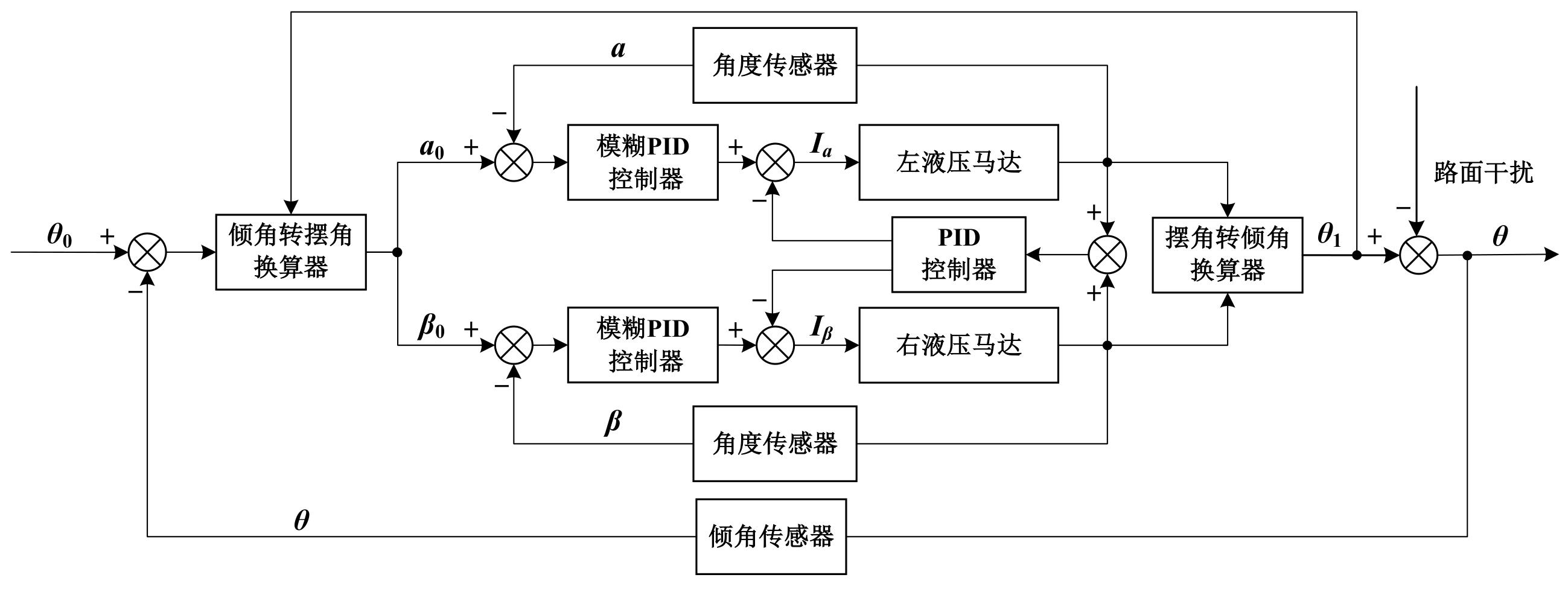
图10
履带式作业机QBP-PID机身姿态控制算法结构图[99]
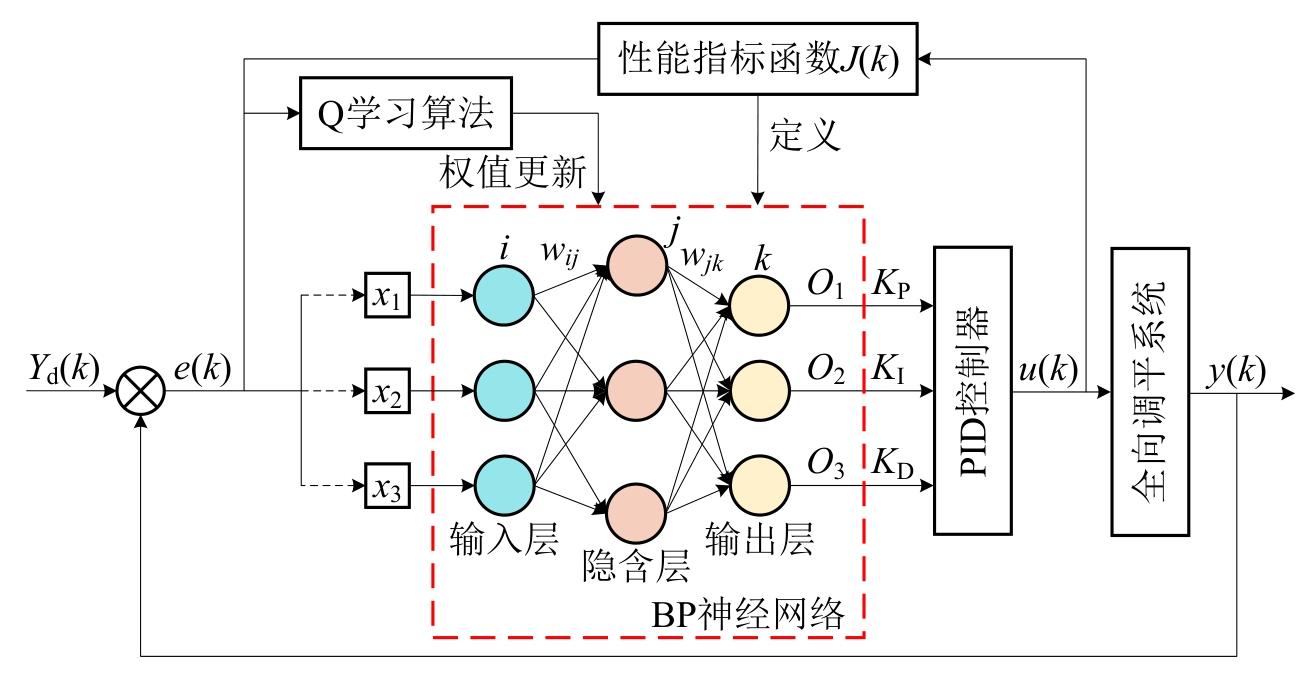
图11
履带式作业机滑模同步控制算法框图[100]
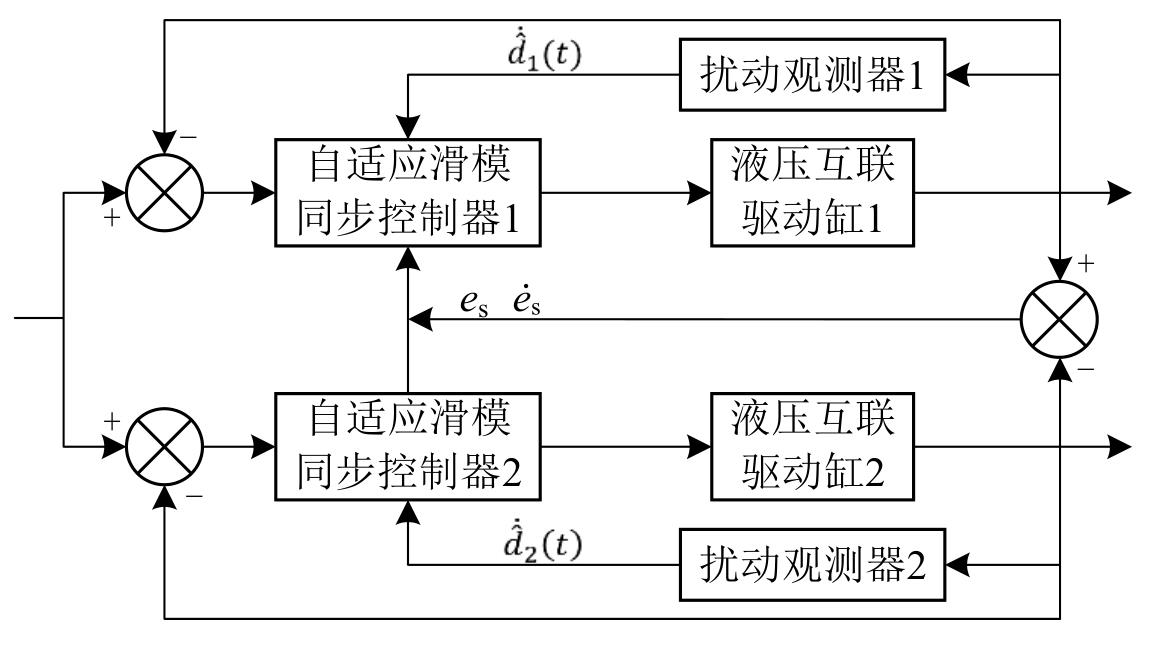
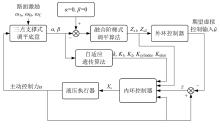
图12
ADLCCS-SLM调平控制系统结构原理图[37]
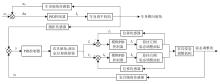
图13
山地拖拉机姿态协同控制系统原理框图[105]

图14
丘陵山地姿态同步控制系统试验现场

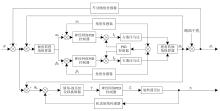
图15
基于神经网络PID的拖拉机—农机具姿态同步控制系统框图[106]
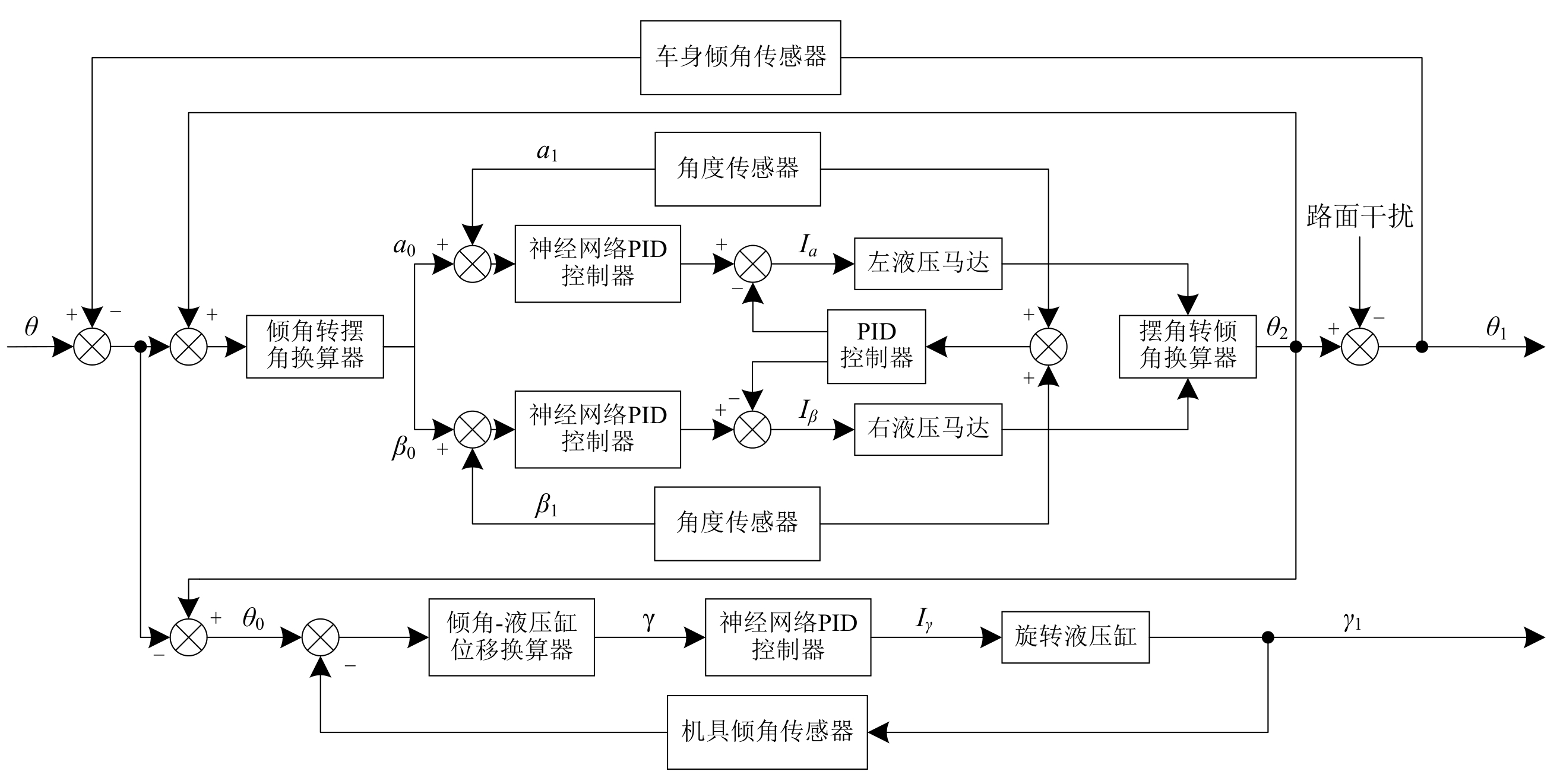
表6
典型底盘调平控制算法对比
| 控制类型 | 算法名称 | 控制原理 | 优势 | 劣势 | 参考文献 |
|---|---|---|---|---|---|
| 线性控制 | 传统PID | 比例-积分-微分反馈调节 | 结构简单、实时性好、易工程实现 | 难以应对强非线性与时变工况 | [ |
| 增量式PID | 控制增量Δu,抑制积分饱和 | 抗干扰能力较好,适合数字控制 | 响应偏慢、大范围动态适应性不足 | [ | |
| 前馈PID | 前馈补偿+反馈控制 | 响应快、抑制外部干扰 | 依赖建模精度、参数整定困难 | [ | |
| 闭环PID | 闭环误差最小化控制 | 结构简单、调试方便 | 控制精度与动态性能受限 | [ | |
| 双闭环PID | 外环位置+内环速度/电流 | 动态响应快、抗干扰能力强 | 结构与调参复杂 | [ | |
| 非线性控制 | 模糊PID | 模糊规则在线调节PID参数 | 适应性强、鲁棒性好 | 规则设计复杂、计算量较大 | [ |
| 双闭环模糊PID控制 | 模糊PID外环位置+内环速度控制 | 精度高、稳定性好 | 规则数量多、调试难度大 | [ | |
| 模糊分层变结构 | 模糊调节+变结构切换 | 控制精度高、鲁棒性强 | 结构复杂、工程实现难 | [ | |
| 神经网络PID | 神经网络自整定PID参数 | 适应强非线性与时变系统 | 训练复杂、泛化能力受限 | [ | |
| 滑模同步 | 滑模保持多执行器同步 | 多系统协调能力强 | 通信需求高、结构复杂 | [ | |
| 带微分观测的三阶滑模 | 状态估计+高阶滑模面 | 控制精度高、估计误差小 | 对噪声敏感、计算量大 | [ | |
| 融合控制 | 模糊-卡尔曼 | 模糊控制+卡尔曼估计 | 抗噪能力强、控制平滑 | 依赖模型、参数敏感 | [ |
| 卡尔曼-模糊PID | 状态估计+模糊调参 | 精度高、抗干扰能力强 | 实时性受限 | [ | |
| GA-BP神经网络 | 遗传算法优化BP网络 | 全局搜索、优化能力强 | 易陷局部最优、泛化不足 | [ | |
| QBP-PID | 强化学习+神经网络调参 | 智能优化、自学习能力强 | 收敛慢、结构和调参复杂 | [ | |
| Backstepping-滑模双闭环 | 非线性反步+滑模控制 | 鲁棒性强、控制精度高 | 参数多、调试工作量大 | [ | |
| 模糊滑模变结构 | 模糊调节滑模增益 | 抗扰能力强、控制灵活 | 规则设计和结构复杂 | [ | |
| 自适应模糊滑模 | 滑模+模糊+自适应 | 自适应与鲁棒性兼顾 | 控制结构复杂、调参难度大 | [ | |
| ADLCCS-SLM | 自适应双闭环+阶梯调平 | 复杂地形适应性强 | 参数耦合、结构复杂、调参难度大 | [ |
| [1] |
中华人民共和国自然资源部. 第三次全国国土调查主要数据公报[EB/OL]. [2025-06-03].
|
| [2] |
中华人民共和国农业农村部. 农业农村部召开全国农业机械化工作推进会议[EB/OL]. [2025-06-03].
|
| [3] |
中国农业机械化信息网. 智能农机"上山"!雷沃这款拖拉机获评"2025丘陵山区十大农机新产品"[EB/OL]. [2025-08-01].
|
| [4] |
尹成强, 高洁, 徐广飞, 等. 农用拖拉机侧翻保护与防侧翻控制关键技术研究综述[J]. 农业工程学报, 2024, 40(22): 1-11.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
中华人民共和国农业农村部. 农业农村部落实中共中央国务院关于进一步深化农村改革扎实推进乡村全面振兴工作部署的实施意见[EB/OL]. [2025-06-03].
|
| [9] |
胡志超, 张萌, 罗伟文, 等. 加快中国丘陵山区农机化发展的思考与对策[J]. 农业工程学报, 2025, 41(14): 39-50.
|
|
|
|
| [10] |
李伶俐, 李江文, 钟守琴, 等. 基于地形复杂度的重庆市耕地 "宜机化" 改造适宜性评价[J]. 中国生态农业学报(中英文), 2022, 30(2): 302-313.
|
|
|
|
| [11] |
缪友谊, 陈小兵, 朱继平, 等. 果园作业平台研究进展分析[J]. 中国农机化学报, 2021, 42(6): 41-49.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
金诚谦, 杨腾祥, 刘岗微, 等. 履带式联合收获机全向调平底盘设计与试验[J]. 农业机械学报, 2020, 51(11): 393-402.
|
|
|
|
| [16] |
|
| [17] |
阳科, 李举, 陈宇, 等. 水稻联合收获机可升降底盘的设计与试验[J]. 智能化农业装备学报(中英文), 2025, 6(1): 59-70.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
杨涛, 孙付春, 黄波, 等. 果园作业平台关键技术研究进展[J]. 中国农机化学报, 2024, 45(1): 152-159.
|
|
|
|
| [21] |
李钊, 樊桂菊, 张昊, 等. 农机具自动调平现状及趋势分析[J]. 中国农机化学报, 2019, 40(4): 48-53.
|
|
|
|
| [22] |
姜欢龙, 严重勇, 李青涛, 等. 自走式农业机械静态稳定性研究现状及展望[J]. 西华大学学报(自然科学版), 2023, 42(1): 32-41.
|
|
|
|
| [23] |
陈立畅, 李佩妮, 杨振杰, 等. 马铃薯中耕施肥机械研究现状与发展趋势[J]. 江苏农业科学, 2023, 51(17): 1-9.
|
|
|
|
| [24] |
|
| [25] |
黄雄辉, 陈鹤, 陈卫灵. 果园高架升降平台结构的有限元分析及模拟仿真[J]. 现代农业装备, 2019, 40(4): 19-23, 29.
|
|
|
|
| [26] |
|
| [27] |
孙永佳, 周军, 李学强, 等. 马铃薯联合收获机车身调平系统设计与试验[J]. 农业机械学报, 2020, 51(S1): 298-306.
|
|
|
|
| [28] |
刘凯, 姚立红, 龙萍, 等. 小型农业作业车辆调平机构的设计与仿真[J]. 江苏农业科学, 2012, 40(11): 401-403.
|
|
|
|
| [29] |
刘凯, 姚立红, 张强, 等. 小型农用作业车辆自动调平系统的设计[J]. 江苏农业科学, 2013, 41(3): 363-366.
|
|
|
|
| [30] |
贾新乐, 石舟, 李锐, 等. 丘陵山区小型农机底盘自动调平系统设计与试验[J]. 农业机械学报, 2024, 55(S1): 108-115.
|
|
|
|
| [31] |
|
| [32] |
刘凤霞, 逄焕晓, 翟国强, 等. 丘陵山区单行玉米收获机自适应姿态调整系统研究[J]. 农机化研究, 2025, 47(9): 67-73, 82.
|
|
|
|
| [33] |
齐文超, 李彦明, 陶建峰, 等. 丘陵山地拖拉机姿态主动调整系统设计与实验[J]. 农业机械学报, 2019, 50(7): 381-388.
|
|
|
|
| [34] |
齐文超, 李彦明, 张锦辉, 等. 丘陵山地拖拉机车身调平双闭环模糊PID控制方法[J]. 农业机械学报, 2019, 50(10): 17-23, 34.
|
|
|
|
| [35] |
种昆, 李洪迁, 李政平, 等. 丘陵山地姿态调整轮式拖拉机的设计与仿真[J]. 农机化研究, 2021, 43(1): 247-251.
|
|
|
|
| [36] |
于春生, 胡伟, 付明刚, 等. 小型玉米收获机车身调平系统研究[J]. 农机化研究, 2024, 46(11): 104-109.
|
|
|
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
日本久保田(KUBOTA). 全喂入式联合收割机4LZ-6C8(C4)[EB/OL]. [2025-06-03].
|
| [41] |
|
| [42] |
日本洋马(YANMAR). 全喂入联合收割机YH 1180R[EB/OL]. [2025-06-03].
|
| [43] |
李尚平, 韦雨彤, 任泓宇, 等. 丘陵地区履带式甘蔗收获机横向调平系统设计与试验[J]. 农业机械学报, 2025, 56(6): 374-385.
|
|
|
|
| [44] |
|
| [45] |
李成松, 陈端凤, 坎杂, 等. 自走式番茄收获机调平液压系统设计[J]. 液压与气动, 2014, 38(1): 18-22, 26.
|
|
|
|
| [46] |
陈晨. 番茄收获机底盘调平液压系统设计及基于AMESim的仿真[J]. 液压气动与密封, 2023, 43(9): 28-33.
|
|
|
|
| [47] |
陈晨. 自走式番茄收获机底盘调平液压系统设计[J]. 新疆农机化, 2023(5): 8-11.
|
|
|
|
| [48] |
杨径, 陆华忠, 李君, 等. 果园升降平台调平机构建模与仿真[J]. 农机化研究, 2018, 40(5): 111-116.
|
|
|
|
| [49] |
刘平义, 王春燕, 李海涛, 等. 丘陵山区农用仿形行走动态调平底盘设计与试验[J]. 农业机械学报, 2018, 49(2): 74-81.
|
|
|
|
| [50] |
舒鑫, 蒋蘋, 胡文武, 等. 高地隙植保机底盘调平系统的设计与试验[J]. 湖南农业大学学报(自然科学版), 2019, 45(3): 321-326.
|
|
|
|
| [51] |
|
| [52] |
|
| [53] |
于泳超, 康峰, 郑永军, 等. 果园高位自动调平作业平台设计及仿真[J]. 北京林业大学学报, 2021, 43(2): 150-159.
|
|
|
|
| [54] |
|
| [55] |
王忠山, 马文星, 李洪龙, 等. 丘陵山地拖拉机车身调平液压系统设计与分析[J]. 液压气动与密封, 2017, 37(10): 76-80.
|
|
|
|
| [56] |
彭贺, 马文星, 赵恩鹏, 等. 丘陵山地轮式拖拉机车身调平系统设计与物理模型试验[J]. 农业工程学报, 2018, 34(14): 36-44.
|
|
|
|
| [57] |
|
| [58] |
陈庚, 罗亚辉, 蒋蘋, 等. 基于主动气囊的高地隙底盘调平系统设计与试验[J]. 农机化研究, 2024, 46(5): 45-52.
|
|
|
|
| [59] |
邹大庆, 丁仁凯, 石放辉, 等. 丘陵山区履带式作业机全向调平系统设计[J]. 农业装备技术, 2023, 49(4): 11-13.
|
|
|
|
| [60] |
蒋俞, 孙泽宇, 汪若尘, 等. 丘陵山区履带式作业机全向调平系统设计与性能试验[J]. 农业工程学报, 2023, 39(18): 64-73.
|
|
|
|
| [61] |
刘平义, 柯呈鹏, 柯婷, 等. 丘陵山区农用预检测主动调平底盘设计与试验[J]. 农业机械学报, 2020, 51(3): 371-378.
|
|
|
|
| [62] |
柯超, 谢守勇, 邓成志, 等. 丘陵山地移栽机自动调平系统设计与试验[J]. 中国农机化学报, 2023, 44(8): 17-26.
|
|
|
|
| [63] |
|
| [64] |
|
| [65] |
DeereJohn. Hillside leveling systems for John Deere models[EB/OL]. [2025-06-03].
|
| [66] |
|
| [67] |
Massey Ferguson(AGCO SAS). Combine harvesters MF Beta AL4[EB/OL]. [2025-06-03].
|
| [68] |
GmbH)FendtAGCO. C-Series SL[EB/OL]. [2025-06-03].
|
| [69] |
CLAAS KGaA mbH. LEXION 8000/7000[EB/OL]. [2025-06-03].
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
吕凤玉, 李晓康, 贺成柱, 等. 全向姿态调整农机履带底盘设计与试验[J]. 中国农机化学报, 2024, 45(8): 132-137.
|
|
|
|
| [75] |
|
| [76] |
诸奇杰, 俞高红, 王磊, 等. 设施蔬菜自动调平移栽平台设计与试验[J]. 农机化研究, 2024, 46(12): 75-82.
|
|
|
|
| [77] |
聂昭成, 罗红品, 刘威, 等. 丘陵山地作物信息采集全向自平衡装置的设计与试验[J]. 西南大学学报(自然科学版), 2023, 45(10): 129-138.
|
|
|
|
| [78] |
|
| [79] |
李尚平, 闫昱晓, 徐冰, 等. 丘陵地区剪叉式甘蔗转运车调平控制系统设计与试验[J]. 农业机械学报, 2021, 52(11): 384-393.
|
|
|
|
| [80] |
|
| [81] |
梁桂林, 高嵩, 孔阁, 等. 一种车载雷达调平系统的虚腿补偿控制策略[J]. 现代雷达, 2024, 46(4): 106-109.
|
|
|
|
| [82] |
|
| [83] |
|
| [84] |
肖飞, 张之善, 王顺. 工程机械支腿自动调平的研究[J]. 液压与气动, 2013, 37(12): 47-51.
|
|
|
|
| [85] |
李林林, 邓干然, 林卫国, 等. 农业机械自动调平技术发展现状与趋势[J]. 现代农业装备, 2021, 42(5): 2-7, 35.
|
|
|
|
| [86] |
段罗佳, 杨福增, 闫彬, 等. 苹果生产智能底盘与除草及收获装备技术研究进展[J]. 智慧农业(中英文), 2022, 4(3): 24-41.
|
|
|
|
| [87] |
刘羊, 刘宇洋, 陈江春, 等. 标准化果园多功能作业平台关键技术研究现状与趋势[J]. 智能化农业装备学报(中英文), 2024, 5(1): 31-39.
|
|
|
|
| [88] |
赵静一, 杨宇静, 康绍鹏, 等. 自行式液压平板车4点支撑"面追逐式"调平策略的研究与应用[J]. 机床与液压, 2015, 43(15): 57-60.
|
|
|
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
李晓松, 蔡艳芳. 基于CAN总线的机电式4点自动调平系统设计与实现[J]. 火控雷达技术, 2010, 39(2): 99-102.
|
|
|
|
| [94] |
顾星海, 刘柳. 基于PLC控制的机电式自动调平系统[J]. 航空科学技术, 2016, 27(8): 36-40.
|
|
|
|
| [95] |
吕昊暾, 胡召田, 于泳超, 等. 果园高位作业平台自动调平前馈PID控制方法[J]. 农业工程学报, 2021, 37(18): 20-28.
|
|
LYU H,
|
|
| [96] |
杨腾祥, 金诚谦, 蔡泽宇, 等. 履带式联合收割机横向调平底盘设计[J]. 中国农机化学报, 2020, 41(7): 1-8.
|
|
|
|
| [97] |
|
| [98] |
|
| [99] |
|
| [100] |
汪若尘, 苏兆睿, 丁仁凯, 等. 基于滑模同步控制的履带式作业机全向调平系统研究[J]. 农业机械学报, 2024, 55(4): 394-401.
|
|
|
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
牟孝栋, 杨福增, 段罗佳, 等. 丘陵山地拖拉机调平与防翻关键技术研究现状与发展趋势[J]. 智慧农业(中英文), 2024, 6(3): 1-16.
|
|
|
|
| [105] |
杨福增, 牛瀚麟, 孙景彬, 等. 山地履带拖拉机与农具姿态协同控制系统设计与试验[J]. 农业机械学报, 2022, 53(1): 414-422.
|
|
|
|
| [106] |
张锦辉, 李彦明, 齐文超, 等. 基于神经网络PID的丘陵山地拖拉机姿态同步控制系统[J]. 农业机械学报, 2020, 51(12): 356-366.
|
|
|
|
| [107] |
|
| [108] |
|
| [109] |
张富贵, 吕小莲, 杨华兵, 等. 基于模糊PID的山地拖拉机调平控制系统的设计[J]. 湖南农业大学学报(自然科学版), 2023, 49(1): 121-126.
|
|
|
|
| [110] |
|
| [111] |
彭贺, 马文星, 王忠山, 等. 丘陵山地拖拉机车身调平控制仿真分析与试验[J]. 吉林大学学报(工学版), 2019, 49(1): 157-165.
|
|
|
|
| [112] |
|
| [113] |
|
| [114] |
|
| [115] |
|
| [1] | 李磊, 佘小明, 唐兴隆, 张涛, 董继伟, 古愉川, 周晓晖, 冯伟, 杨清慧. 基于模糊逻辑控制的滑移转向底盘避障控制方法[J]. 智慧农业(中英文), 2026, 8(1): 213-225. |
| [2] | 陆在旺, 张玉成, 马宜科, 代锋, 董杰, 王鹏, 陆会贤, 李同滨, 赵凯宾. 农业多机器人全覆盖作业关键技术研究进展与展望[J]. 智慧农业(中英文), 2025, 7(5): 17-36. |
| [3] | 余忠义, 王洪宇, 何雄奎, 赵磊, 王媛媛, 孙海. 激光除草机器人关键技术与展望[J]. 智慧农业(中英文), 2025, 7(2): 132-145. |
| [4] | 刘力宁, 张洪奇, 章子文, 张正辉, 王甲玉, 李宣宣, 朱珂, 柳平增. 无人智慧农场关键技术与构建模式——以“吨半粮”无人农场为例[J]. 智慧农业(中英文), 2025, 7(1): 70-84. |
| [5] | 贺庆, 冀杰, 冯伟, 赵立军, 张博涵. 割草机器人自适应时域MPC路径跟踪控制方法[J]. 智慧农业(中英文), 2024, 6(3): 82-93. |
| [6] | 刘智勇, 温昌凯, 肖跃进, 付卫强, 王昊, 孟志军. 拖拉机-牵引式农机具路径跟踪控制算法研究[J]. 智慧农业(中英文), 2023, 5(4): 58-67. |
| [7] | 徐立鸿, 刘辉辉, 徐赫, 蔚瑞华, 蔡文韬. 南方蓝莓智能温室促早熟生产多因子协调控制技术[J]. 智慧农业(中英文), 2021, 3(4): 86-98. |
| [8] | 王子杰, 刘国海, 张多, 沈跃, 姚震, 张贺. 高地隙四轮独立驱动喷雾机路径跟踪模型预测控制[J]. 智慧农业(中英文), 2021, 3(3): 82-93. |
| [9] | 范道全, 张美娜, 潘健, 吕晓兰. 基于靶标叶面积密度参数的变量喷雾控制系统开发与性能试验[J]. 智慧农业(中英文), 2021, 3(3): 60-69. |
| [10] | 吴应新, 吴剑桥, 杨雨航, 李沐桐, 甘玲, 贡亮, 刘成良. 油电混合果园自动导航车控制器硬件在环仿真平台设计与应用[J]. 智慧农业(中英文), 2020, 2(4): 149-164. |
| [11] | 丁幼春, 王绪坪, 彭靖叶, 夏中州. 轮式谷物联合收获机视觉导航系统设计与试验[J]. 智慧农业(中英文), 2020, 2(4): 89-102. |
| [12] | 周航, 张顺路, 翟毅豪, 王松, 张春龙, 张俊雄, 李伟. 天然橡胶割胶机器人视觉伺服控制方法与割胶试验[J]. 智慧农业(中英文), 2020, 2(4): 56-64. |
| [13] | 吴剑桥, 范圣哲, 贡亮, 苑进, 周强, 刘成良. 果蔬采摘机器手系统设计与控制技术研究现状和发展趋势[J]. 智慧农业(中英文), 2020, 2(4): 17-40. |
| [14] | 郭威, 吴华瑞, 朱华吉. 设施温室影像采集与环境监测机器人系统设计及应用[J]. 智慧农业(中英文), 2020, 2(3): 48-60. |
| [15] | 李道亮, 刘畅. 人工智能在水产养殖中研究应用分析与未来展望[J]. 智慧农业(中英文), 2020, 2(3): 1-20. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||







