Smart Agriculture ›› 2025, Vol. 7 ›› Issue (2): 132-145.doi: 10.12133/j.smartag.SA202410031
• Overview Article • Previous Articles Next Articles
YU Zhongyi1, WANG Hongyu2( ), HE Xiongkui1(), ZHAO Lei2, WANG Yuanyuan2, SUN Hai2()
), HE Xiongkui1(), ZHAO Lei2, WANG Yuanyuan2, SUN Hai2()
Received:2024-09-29
Online:2025-03-30
Foundation items:The Earmarked Fund for China Agriculture Research System(CARS-28); The 2115 Talent Development Program of China Agricultural University(2115-89052); The National Key Research and Development Program of China(2017YFD0700903); The National Natural Science Foundation of China(31761133019)
corresponding author:
CLC Number:
YU Zhongyi, WANG Hongyu, HE Xiongkui, ZHAO Lei, WANG Yuanyuan, SUN Hai. Key Technologies and Prospects of Laser Weeding Robots[J]. Smart Agriculture, 2025, 7(2): 132-145.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202410031

Fig. 1
Common used weed control methods

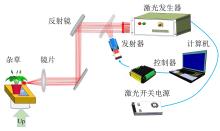
Fig. 2
The working principle of laser weeding


Fig. 3
Key technologies and equipment for laser weeding


Fig. 4
Laser weeding working system


Fig. 5
New laser weeding system device


Fig. 6
Structural design of laser weeding robot

Table 1
Classification and advantages and disadvantages of field weed identification technology
| 杂草识别技术 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| 机器视觉技术 | 通过实时采集、处理、分析图像完成杂草和作物的识别和定位,可结合人工智能、杂草生物学、形态学特征进行识别和管理 | 可进行实时识别杂草图像,作业精度高、灵活性强、无接触识别且成本低,符合激光除草要求 | 采集的信息易受环境、机具影响,数据采集样本多,对激光除草设备稳定性要求高 |
| 光谱分析技术 | 一定光谱波段内利用农田作物、杂草、土壤等背景产生的电磁辐射反射率不同进行识别 | 识别迅速,不会对农田环境造成污染、破坏 | 光谱在农田作业时易受光照影响,波段识别精度低、易受干扰,激光除草精度不高 |
| 遥感识别技术 | 运用遥感图像进行杂草识别的技术,通过向靶标发射电磁波、红外线、可见光等并根据反射的作物、杂草位置信息进行判断 | 测量范围广,能够快速识别田间杂草 | 遥感图像分辨率不高,只能识别个体较大的杂草,激光除草识别率低,无法准确识别定位杂草 |
| 激光传感技术 | 通过X-射线、激光对射传感器等 | 成本低、操作方便、系统简单 | 精度低、受作物杂草的大小密度影响,难以做到激光精准除草 |
Table 2
Classification, advantages and disadvantages of field weed location technology
| 杂草定位技术 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| 静态定位 | 依赖外部基准或预先部署的基础设施(如卫星信号、固定标志物或物理轨道)实现杂草位置的精准确定,其核心是利用预先建立的坐标系统或基础设施完成绝对或相对定位 | 定位精度较高(厘米级),无需复杂环境建模,系统成本较低,抗干扰能力较强等 | 依赖卫星信号或固定基础,环境适应性差,动态障碍物处理能力弱,路径灵活性受限等 |
| 自主定位 | 通过多模态传感器实时感知环境,结合SLAM(Simultaneous Localization and Mapping)算法和惯性导航,在无需外部基准的情况下动态构建地图并估计自身位置 | 无需外部基础设施,适应复杂动态环境,路径规划灵活,具备障碍物规避能力等 | 计算资源需求高,存在累积误差(需定期校准),复杂场景下精度下降(如杂草遮挡),系统成本较高等 |
| 双目视觉定位 | 基于计算机的模仿人类双眼的视觉系统,通过使用两个摄像头从不同角度获取同一物体的图像,来计算物体在三维空间中的位置和姿态,包括图像获取、特征提取、立体匹配和深度计算等 | 非接触式测量,定位精度较高,获取三维结构、视觉信息全面,实时性较好,尤其在机器人实时避障、动态目标跟踪等方面 | 对环境要求较高,定位精度易受影响,视场范围受限,计算量大,系统标定复杂等 |
| 结构光定位 | 一种常用的三维视觉测量技术,通过向物体表面投射特定的结构光图案,然后分析反射光来获取物体的三维信息,包括结构光投射、图像采集、分析及解码 | 测量精度高、速度快,可同时获取区域三维模型信息,减少测量误差,对环境光干扰抵抗力较好 | 对物体表面材质要求高,测量范围有限,系统复杂且成本高,不适用于动态测量 |
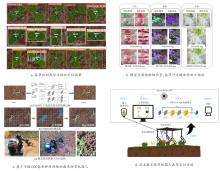
Fig. 7
Main techniques for identifying weeds in the field


Fig. 8
Weed localization technology system of Laser weeding robot


Fig. 9
Navigation and path planning for a typical laser weeding robot


Fig. 10
Structural system of laser weeding robot

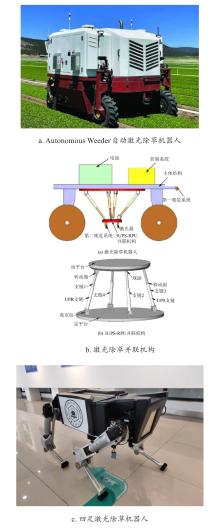
Fig. 11
Typical laser weeding robot


Fig. 12
Structure and experimental diagram of laser weeding device


Fig. 13
A diode laser weeding robot based on deep learning

| 1 |
朱家健. 激光技术在农业中的应用及其展望[J]. 农机化研究, 2009, 31( 4): 222- 225.
|
|
|
|
| 2 |
|
| 3 |
|
| 4 |
孙君亮, 闫银发, 李法德, 等. 智能除草机器人的研究进展与分析[J]. 中国农机化学报, 2019, 40( 11): 73- 80.
|
|
|
|
| 5 |
梁雪梅, 贾鹏, 秦莉, 等. 激光在土地保护、农作物生长及害虫防治领域应用研究进展[J]. 吉林农业大学学报, 2021, 43( 2): 130- 137.
|
|
|
|
| 6 |
周强, 郑永军, 杜文亮, 等. 探索物理植保新领域 提供绿色农业新技术[J]. 农业工程, 2012, 2( S1): 16- 19.
|
|
|
|
| 7 |
马德彪, 唐登勇, 廖攀, 等. 一种基于单片机的激光除草装置[J]. 中国科技信息, 2023( 22): 81- 85.
|
|
|
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
何义川, 汤智辉, 李光新, 等. 葡萄园除草技术研究现状与发展趋势[J]. 中国农机化学报, 2018, 39( 9): 34- 37.
|
|
|
|
| 12 |
|
| 13 |
陈树人, 栗移新, 潘雷. 热除草技术现状和展望[J]. 安徽农业科学, 2007, 35( 33): 10695- 10697.
|
|
|
|
| 14 |
|
| 15 |
陈浩, 杨亚莉. 保护性耕作模式下非化学除草技术的研究[J]. 农机化研究, 2011, 33( 9): 241- 244.
|
|
|
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
邢钦淞, 丁素明, 薛新宇, 等. 智能田间除草机器人发展现状研究[J]. 中国农机化学报, 2022, 43( 8): 173- 181.
|
|
|
|
| 29 |
于合龙, 周雷进雨, 徐兴梅, 等. 激光农业研究进展和展望[J]. 智能化农业装备学报(中英文), 2024( 3): 1- 13.
|
|
|
|
| 30 |
何东健, 乔永亮, 李攀, 等. 基于SVM-DS多特征融合的杂草识别[J]. 农业机械学报, 2013, 44( 2): 182- 187.
|
|
|
|
| 31 |
华嘉伟, 李霞, 段方涛, 等. 基于深度学习的激光除草机器人杂草识别定位方法研究[J/OL]. 天津理工大学学报, 2024: 1- 9. ( 2024-05-15).
|
|
|
|
| 32 |
|
| 33 |
|
| 34 |
牟丹磊. 激光除草机器人执行机构和识别算法的研究[D]. 昆明: 昆明理工大学, 2022.
|
|
|
|
| 35 |
吴旺旺. 激光除草机器人执行机构研究[D]. 昆明: 昆明理工大学, 2014.
|
|
|
|
| 36 |
|
| 37 |
|
| 38 |
|
| 39 |
|
| 40 |
|
| 41 |
潘雷, 陈树人, 栗移新, 等. CO2激光除草应用初步研究[J]. 农机化研究, 2008, 30( 6): 171- 173.
|
|
|
|
| 42 |
|
| 43 |
|
| 44 |
傅雷扬, 李绍稳, 张乐, 等. 田间除草机器人研究进展综述[J]. 机器人, 2021, 43( 6): 751- 768.
|
|
|
|
| 45 |
|
| 46 |
|
| 47 |
王毅平, 王应宽. Carbon Robotics推出可自主根除杂草的新型激光除草机[J]. 农业工程技术, 2022, 42( 12): 117- 118.
|
|
|
|
| 48 |
|
| 49 |
张良安, 唐锴, 赵永杰, 等. 四足激光除草机器人腿部结构参数优化[J]. 农业工程学报, 2020, 36( 2): 7- 15.
|
|
|
|
| 50 |
|
| 51 |
|
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







