Smart Agriculture ›› 2026, Vol. 8 ›› Issue (1): 213-225.doi: 10.12133/j.smartag.SA202408003
• Intelligent Equipment and Systems • Previous Articles Next Articles
LI Lei1,2( ), SHE Xiaoming1,2(), TANG Xinglong1,2, ZHANG Tao1,2, DONG Jiwei1,2, GU Yuchuan1,2, ZHOU Xiaohui1,2, FENG Wei1,2, YANG Qinghui1,2
), SHE Xiaoming1,2(), TANG Xinglong1,2, ZHANG Tao1,2, DONG Jiwei1,2, GU Yuchuan1,2, ZHOU Xiaohui1,2, FENG Wei1,2, YANG Qinghui1,2
Received:2024-08-06
Online:2026-01-30
Foundation items:Chongqing Municipal Fiscal Science and Technology Innovation(cqaas2023sjczsy006); Chongqing Municipal Technology Innovation and Application Development Special Project(CSTB2023TIAD-GPX0037); Chongqing Municipal Scientific Research Institutions Performance Incentive Guidance Special Project(cstc2022jxjl80008)
About author:LI Lei, E-mail: lileiCBD@163.com
corresponding author:
CLC Number:
LI Lei, SHE Xiaoming, TANG Xinglong, ZHANG Tao, DONG Jiwei, GU Yuchuan, ZHOU Xiaohui, FENG Wei, YANG Qinghui. Obstacle Avoidance Control Method of Electric Skid-Steering Chassis Based on Fuzzy Logic Control[J]. Smart Agriculture, 2026, 8(1): 213-225.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202408003
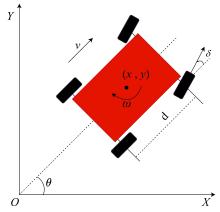
Fig. 1
Kinematic model of the front-steering chassis
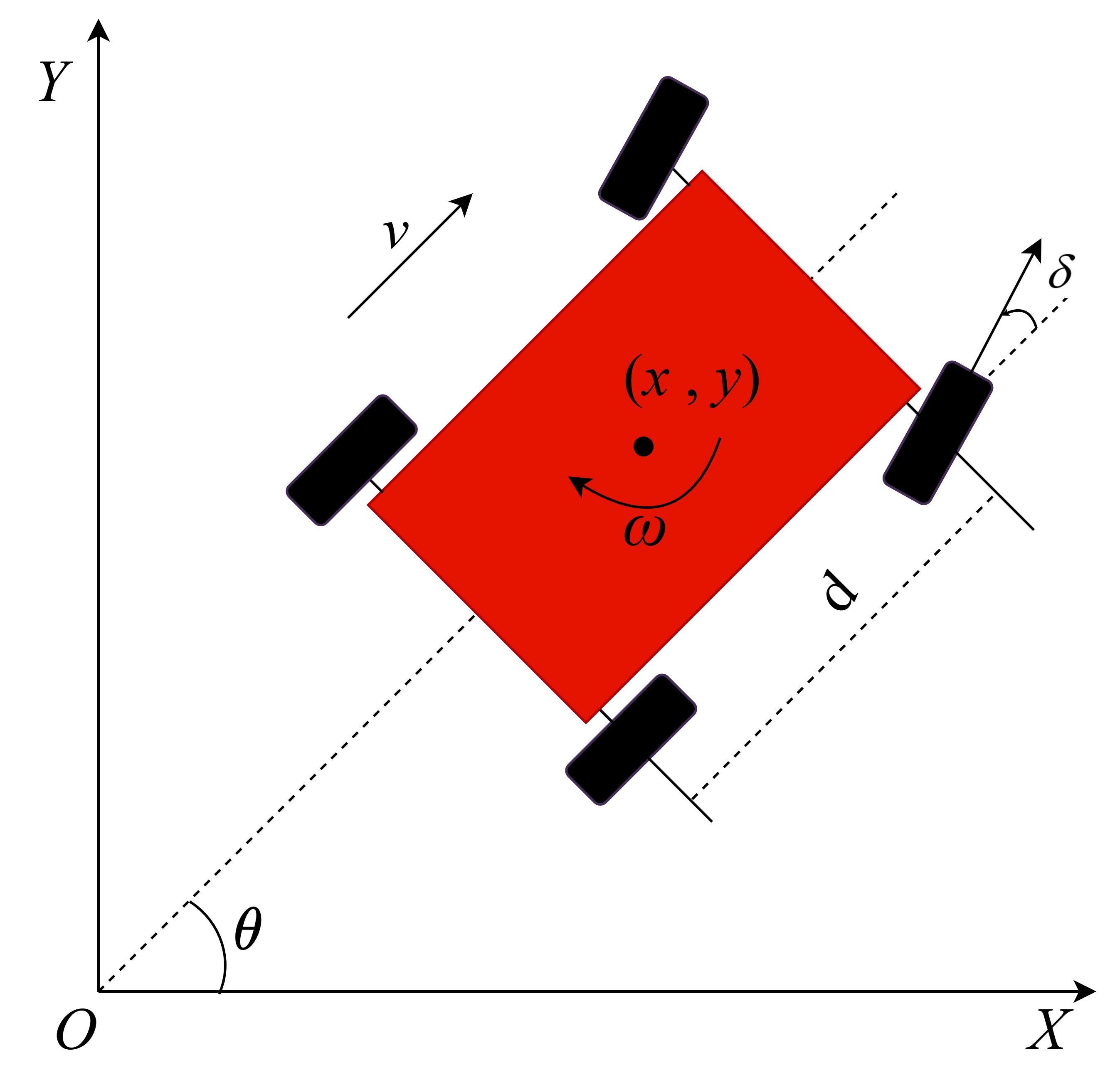
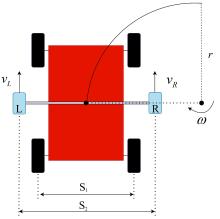
Fig. 2
Kinematic model of skid-steering chassis
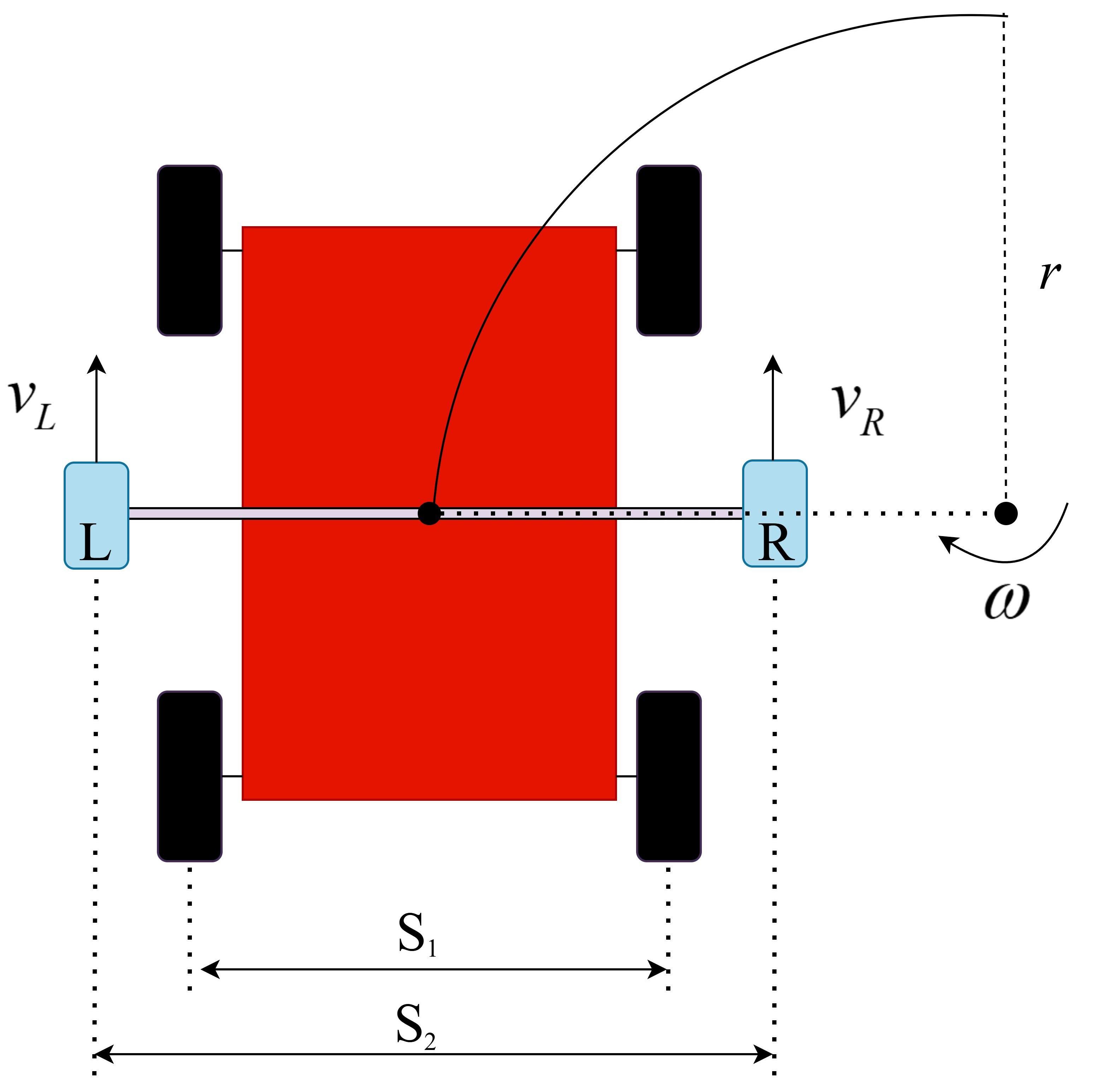
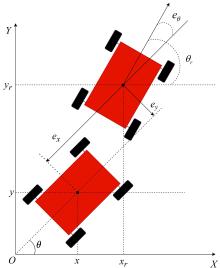
Fig. 3
Kinematic error model of skid-steering chassis

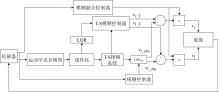
Fig. 4
Diagram block of trajectory tracking and obstacle avoidance system
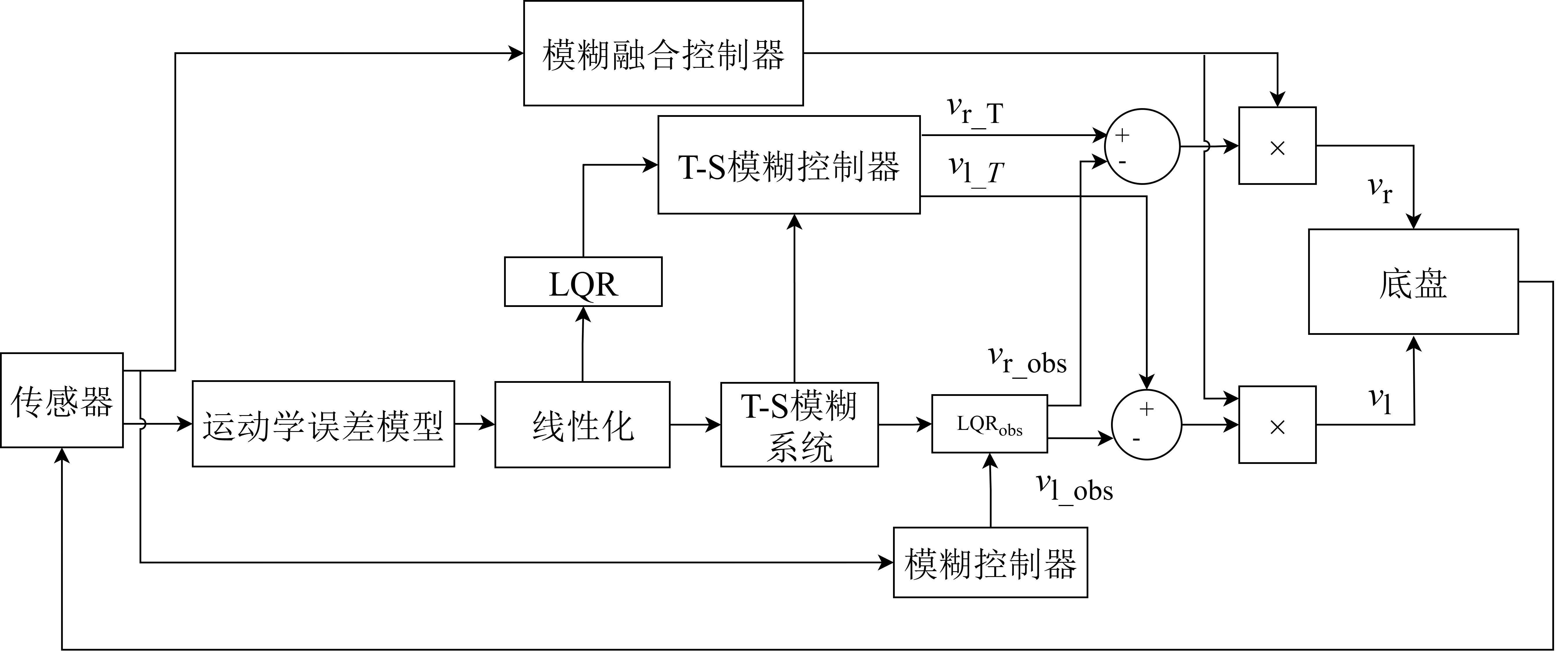
Table 1
Parameters setting of gain matrix of the L Q R o b s obstacle avoidance
| 名称 | 类别 | 基本论域 | 量化等级 |
|---|---|---|---|
| 输入 | [0 m, 0.5 m] | {0 m, 0.25 m, 0.5 m} = {PS, PM, PB} | |
| 输入 | [0 m/s, 1.4 m/s] | {0 m/s, 0.4 m/s, 1.4 m/s} = {PS, PM, PB} | |
| 输出 | [0, 3] | {0, 0.4, 1, 3} = {ZE, PS, PM, PB} | |
| 输出 | [0, 3] | {0, 0.4, 1, 3} = {ZE, PS, PM, PB} | |
| 输出 | [0, 3] | {0, 0.5, 0.8, 3} = {ZE, PS, PM, PB} | |
| 输出 | [0, 0.014] | {0, 0.004, 0.006, 0.014} = {ZE, PS, PM, PB} | |
| 输出 | [0, 0.014] | {0, 0.004, 0.006, 0.014} = {ZE, PS, PM, PB} |

Fig. 5
Membership function of gain matrix of the L Q R o b s obstacle avoidance
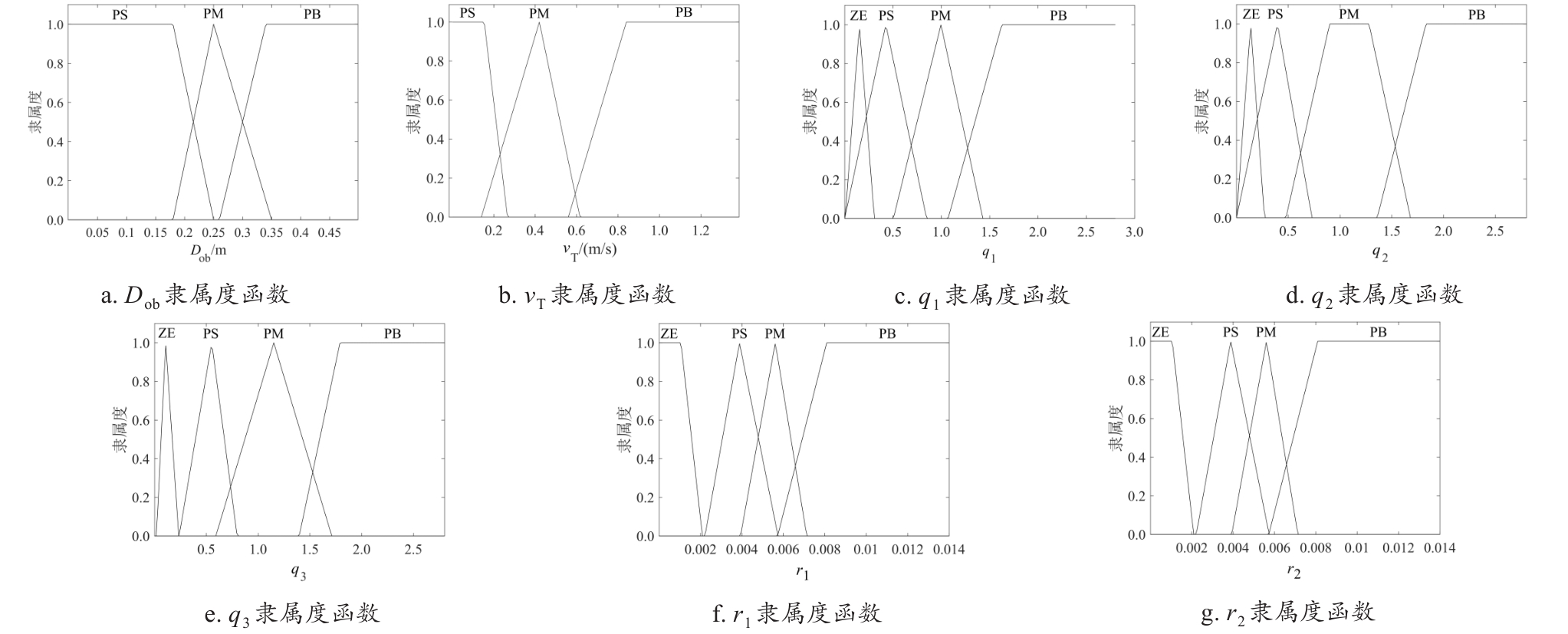
Table 2
Fuzzy rule of gain matrix of the L Q R o b s obstacle avoidance
| 规则数 | 输入 | 输出 | |||||
|---|---|---|---|---|---|---|---|
| 1 | PS | PS | PB | PB | PB | ZE | ZE |
| 2 | PS | PS | PB | PB | PB | PS | PS |
| 3 | PS | PS | PB | PB | PB | PB | PB |
| 4 | PM | PM | PS | PS | PS | PM | PM |
| 5 | PM | PM | PM | PM | PM | PM | PM |
| 6 | PM | PM | PB | PB | PB | PB | PB |
| 7 | PB | PB | ZE | ZE | ZE | PB | PB |
| 8 | PB | PB | ZE | ZE | ZE | PB | PB |
| 9 | PB | PB | ZE | ZE | ZE | PB | PB |

Fig. 6
Membership function of the fuzzy fusion control
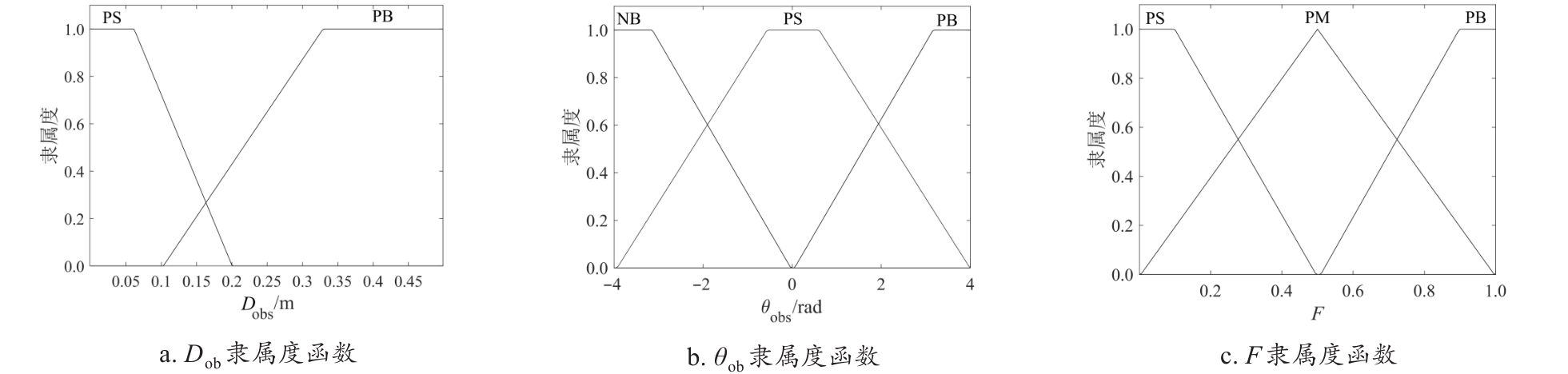
Table 3
The fuzzy rules of the fuzzy fusion control
| PS | PB | |
|---|---|---|
| NB | PB | PS |
| PS | PM | PS |
| PB | PB | PS |
Table 4
Parameters of the skid-steering chassis
| 参数名称 | 单位 | 数值 |
|---|---|---|
| 整机形式 | / | 轮式 |
| 外形尺寸 | mm | 1 500×1 200×800 |
| 装备质量 | kg | 200 |
| 载重 | kg | 100 |
| 平均最高车速 | km/h | 5 |
| 轴距 | mm | 800 |
| 轮距 | mm | 1 100 |
| 虚拟轴距 | mm | 1 250 |
| LQR增益矩阵 Q | / | diag(1,1,1) |
| LQR增益矩阵 R | / | diag(0.005,0.005) |
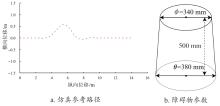
Fig. 7
Simulation design of tracking of obstacle avoidance of chassis
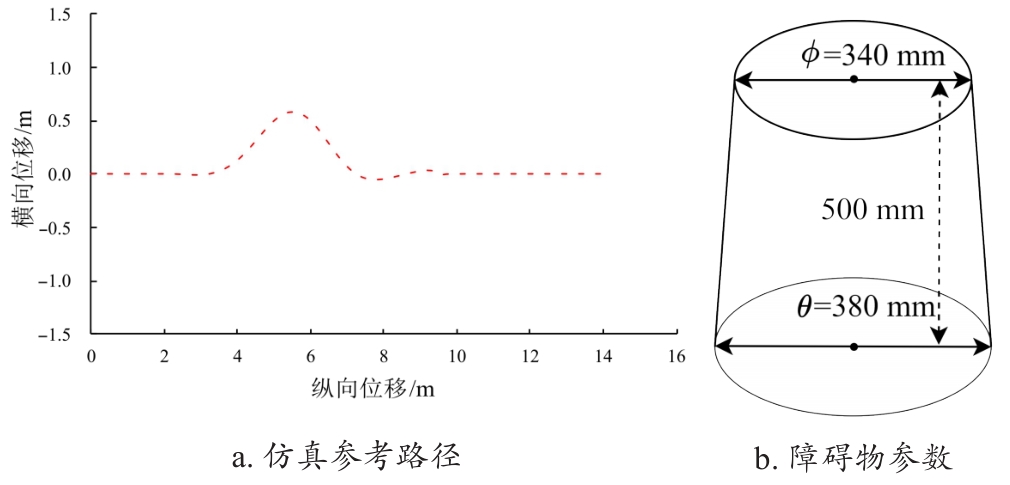

Fig. 8
Design of Matlab-simulink simulation experiment
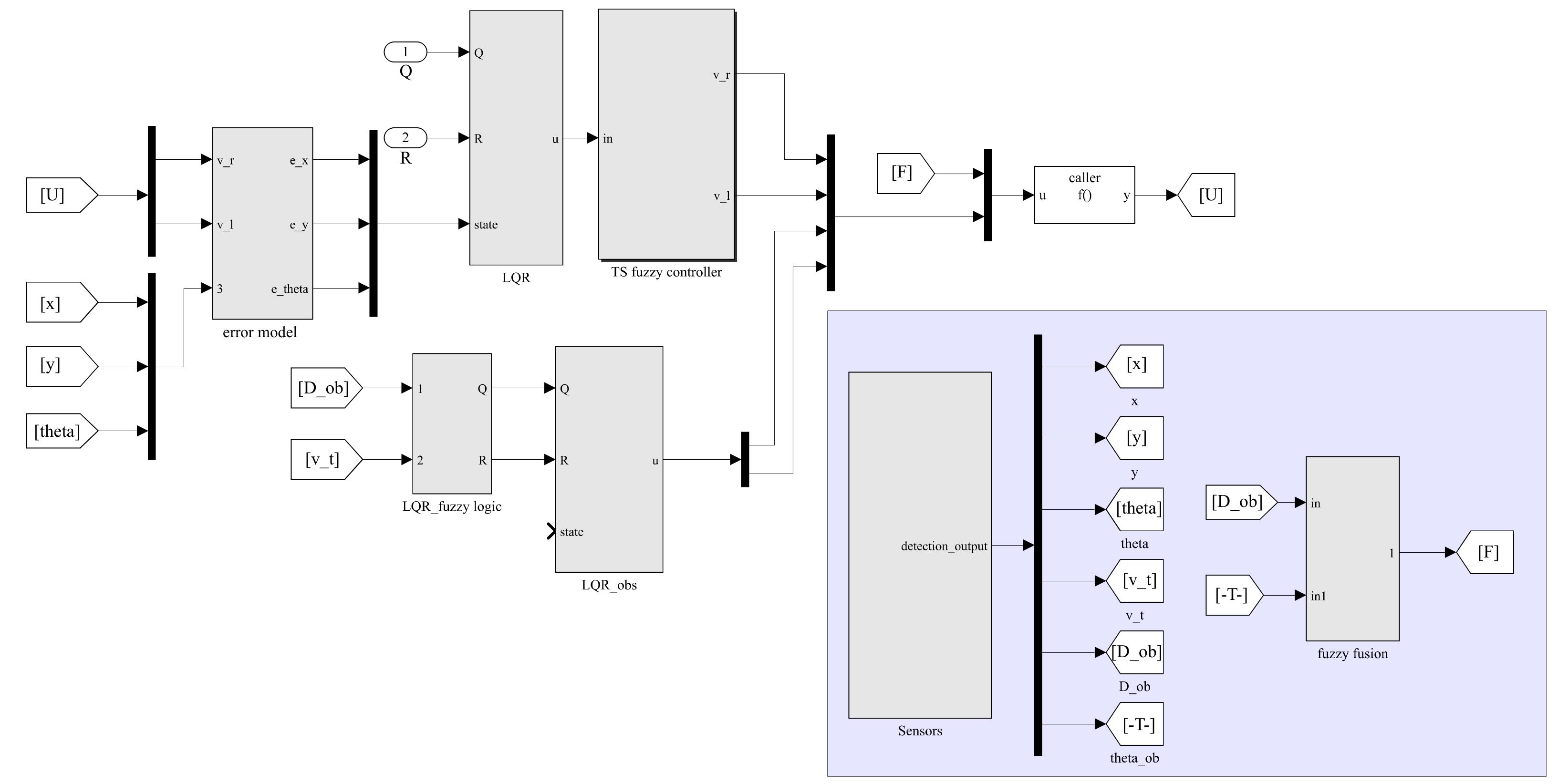
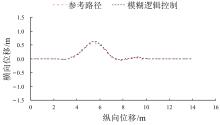
Fig. 9
Tracking results of chassis without obstacles (simulation)
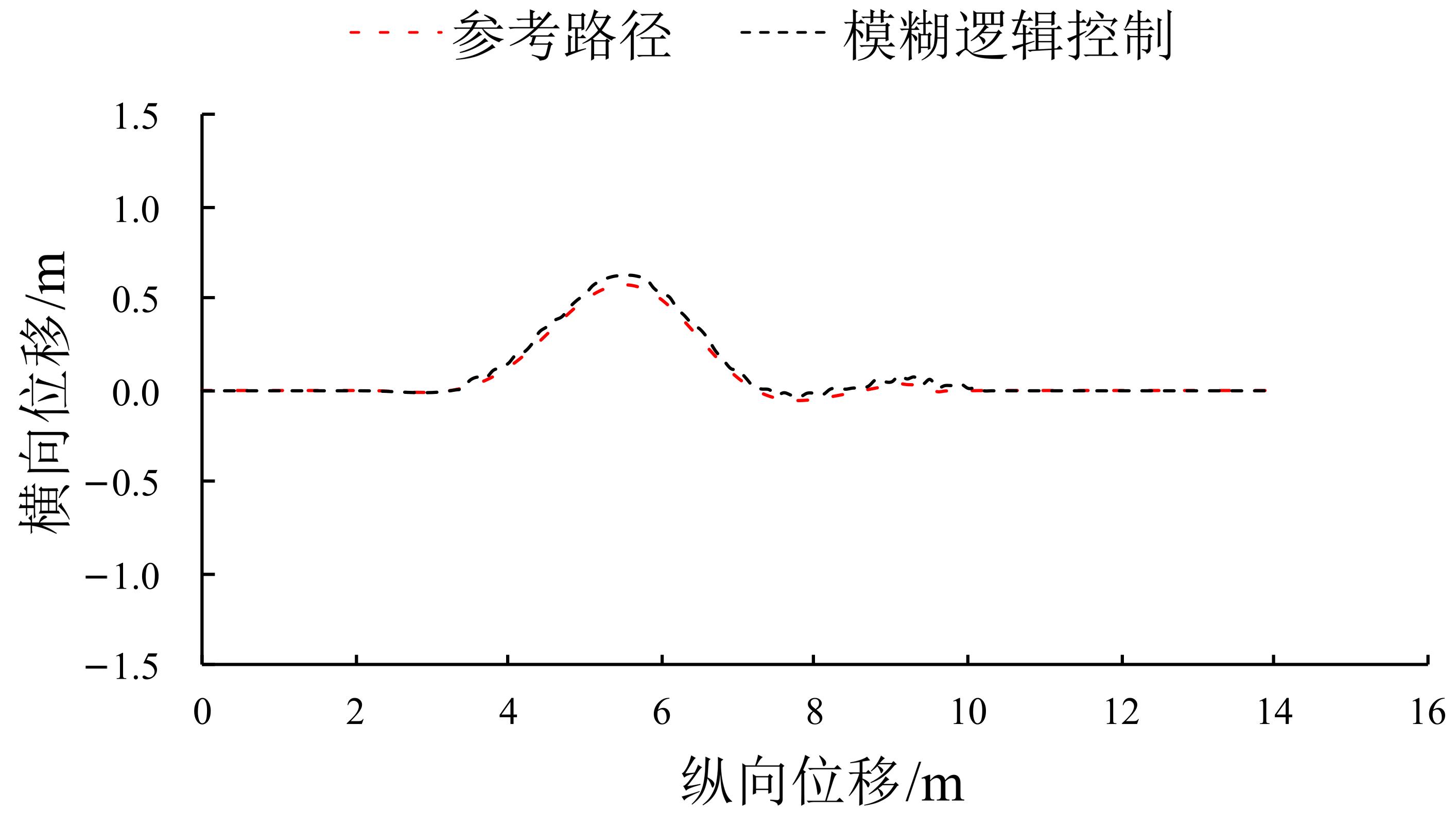
Fig. 10
The tracking results of chassis with obstacles (simulation)
Table 5
Comparison of simulation results under different working conditions
| 工况 | 横向平均跟踪误差/m | 纵向平均跟踪误差/m | 直线平均横向跟踪误差/m | 直线平均纵向跟踪误差/m | 曲线平均横向跟踪误差/m | 曲线平均纵向跟踪误差/m |
|---|---|---|---|---|---|---|
| 无障碍物 | 0.036 5 | 0.048 2 | 0.021 | 0.030 | 0.065 | 0.078 |
| 有障碍物 | 0.189 | 0.223 | 0.023 | 0.028 | 0.532 | 0.489 |

Fig. 11
Changes of gain matrix of L Q R o b s obstacle avoidance controller (simulation)
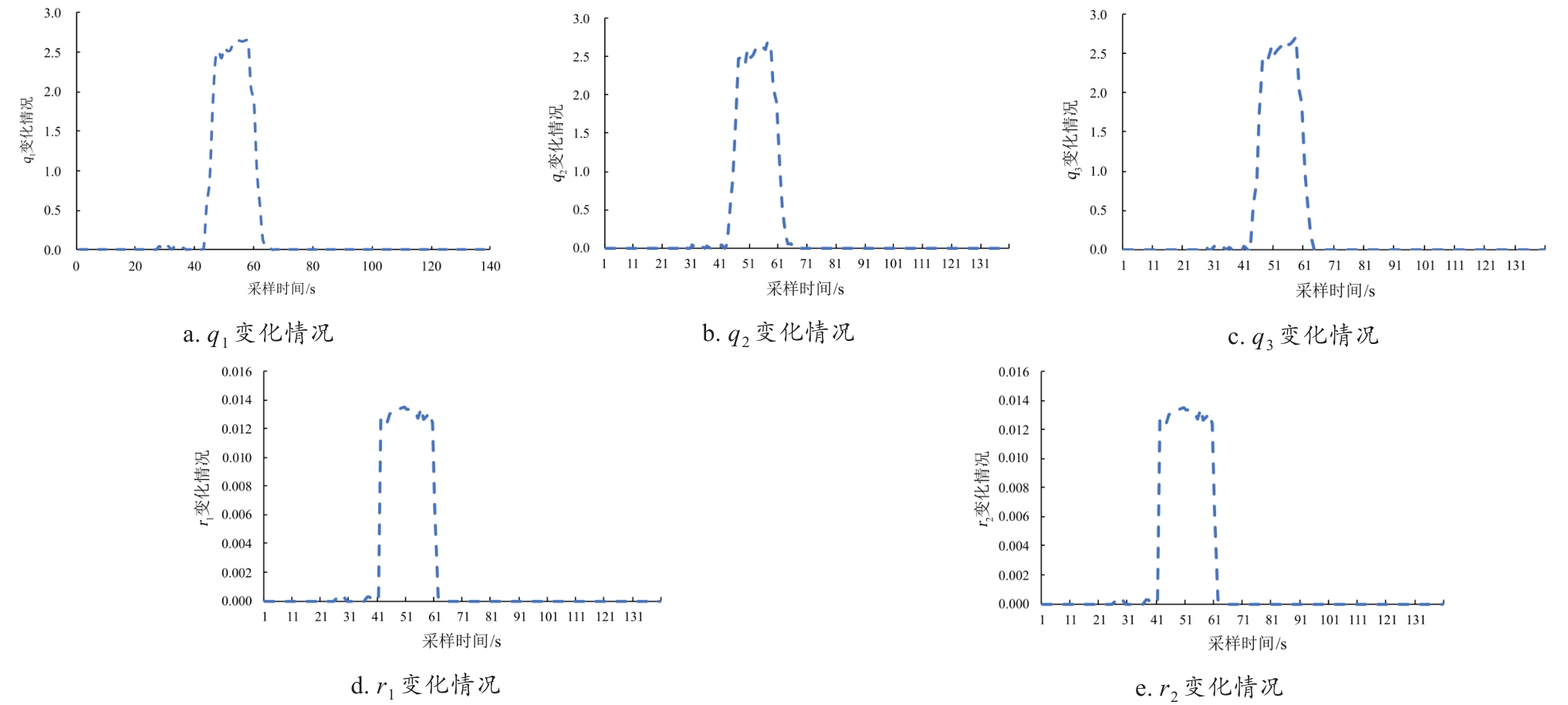
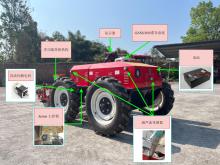
Fig. 12
Electric skid steer chassis with tracking and obstacle avoidance navigation system
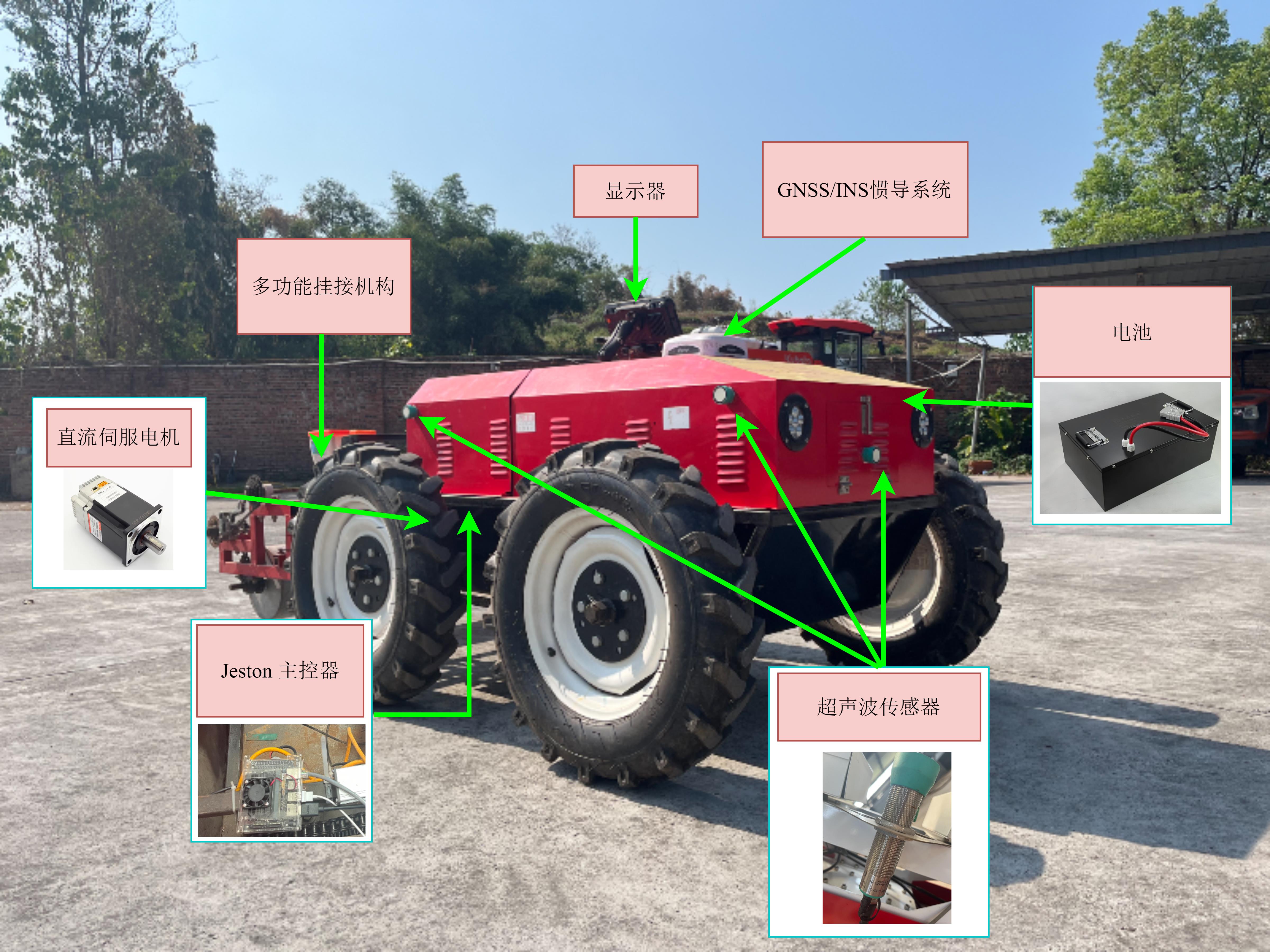

Fig. 13
Experiments scenario of obstacle avoidance of skid-steering chassis

Fig. 14
Reference path of skid-steering chassis obstacle avoidance experiments
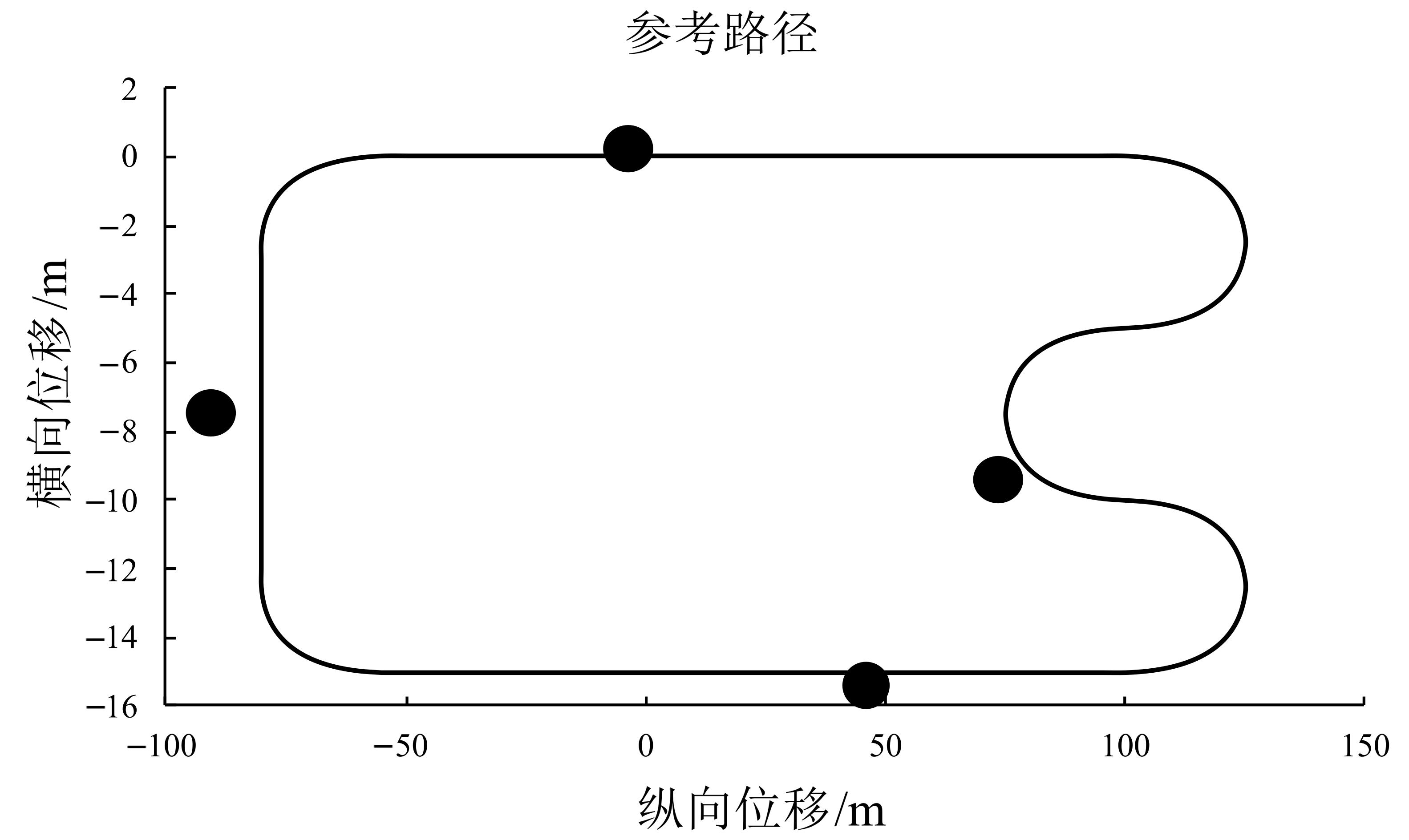
Fig. 15
Tracking results of chassis without obstacles (experiments)
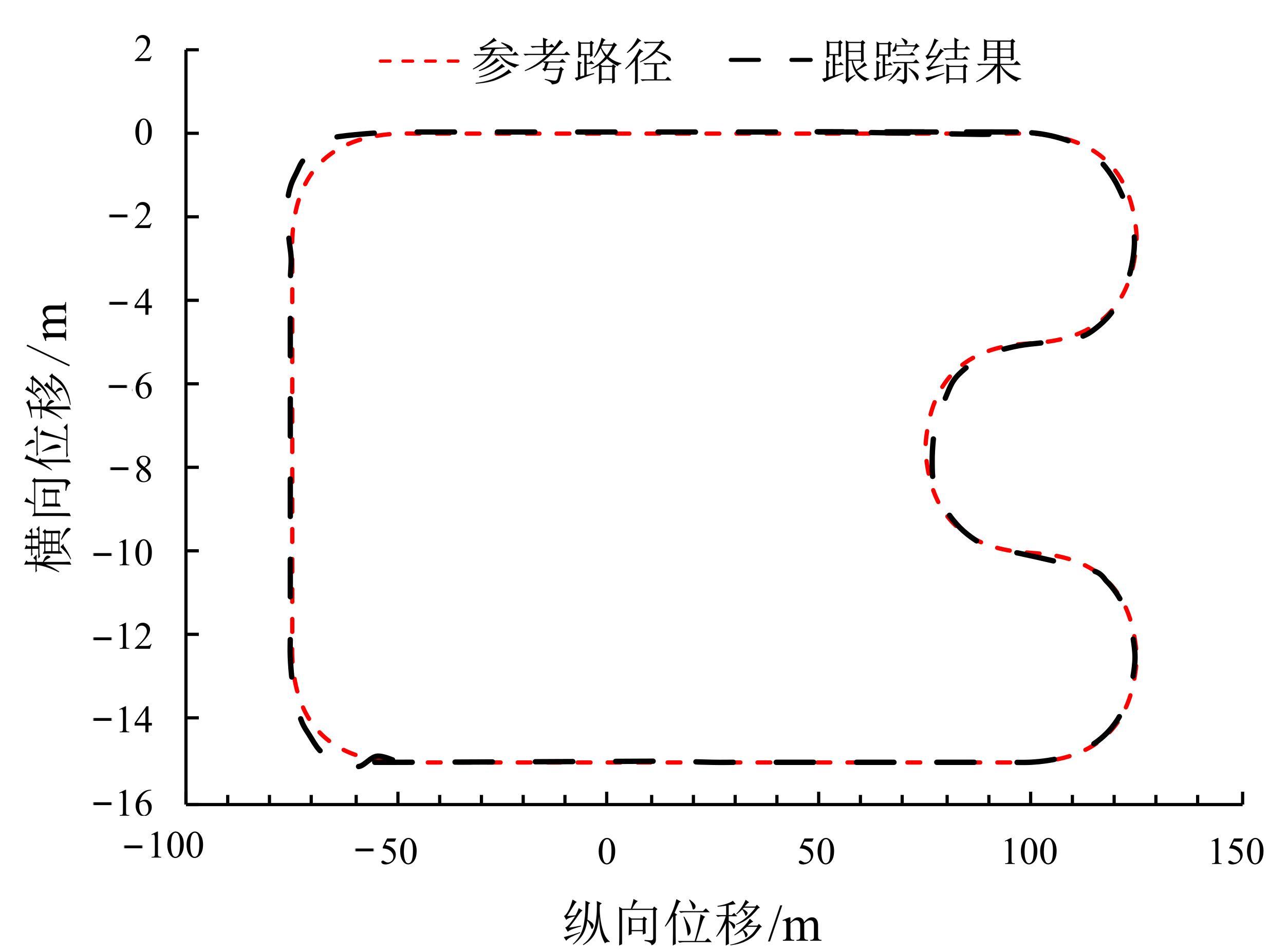
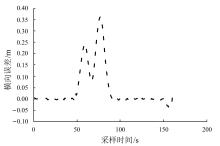
Fig. 16
Lateral tracking error of chassis without obstacles (experiments)
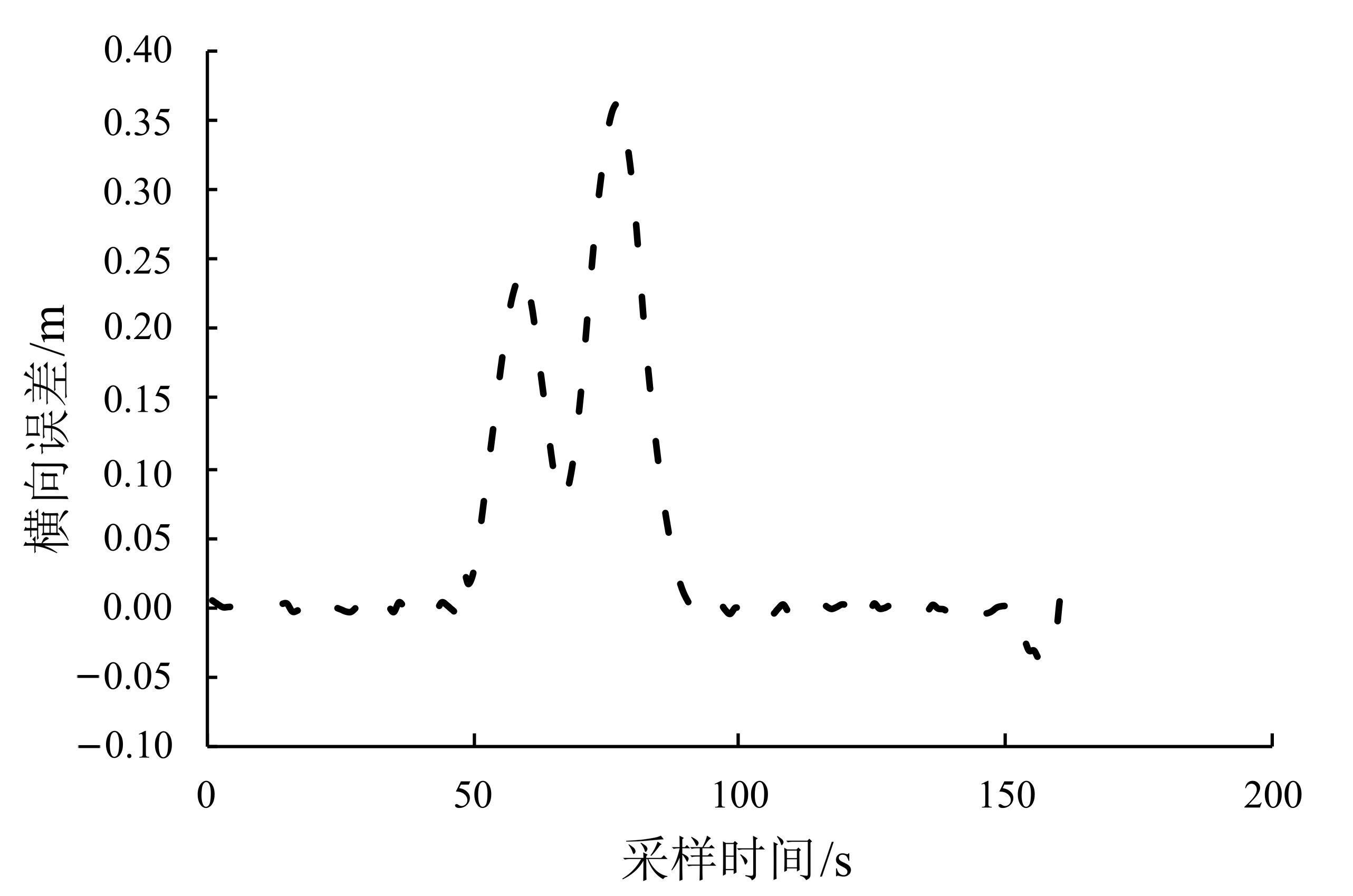
Fig. 17
Longitudinal tracking error of chassis without obstacles (experiments)
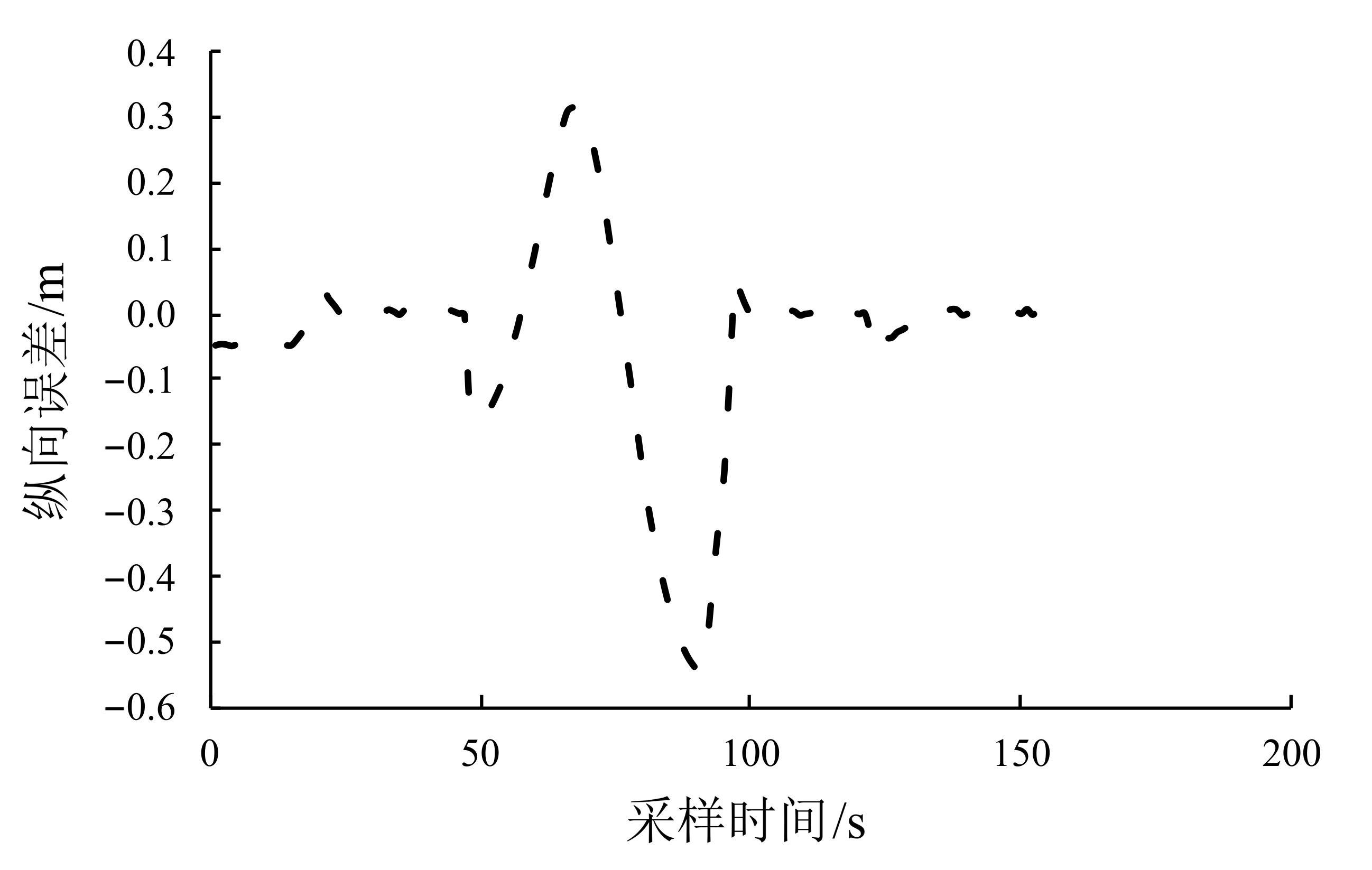
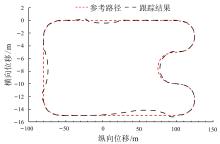
Fig. 18
Obstacle avoidance and tracking results of chassis with fuzzy obstacle avoidance controller (experiments)
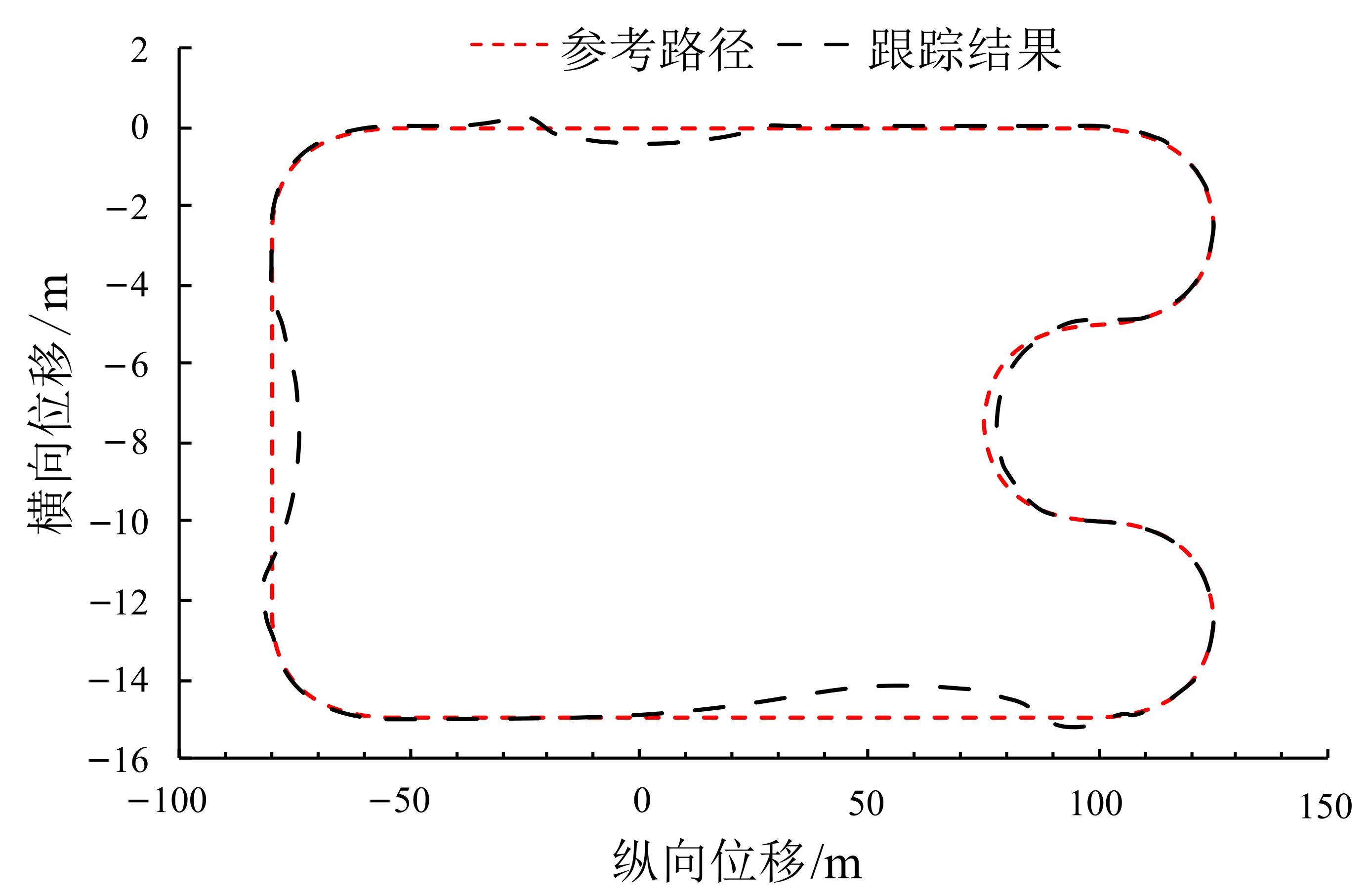
Fig. 19
Obstacle avoidance and tracking results of chassis without fuzzy obstacle avoidance controller (experiments)
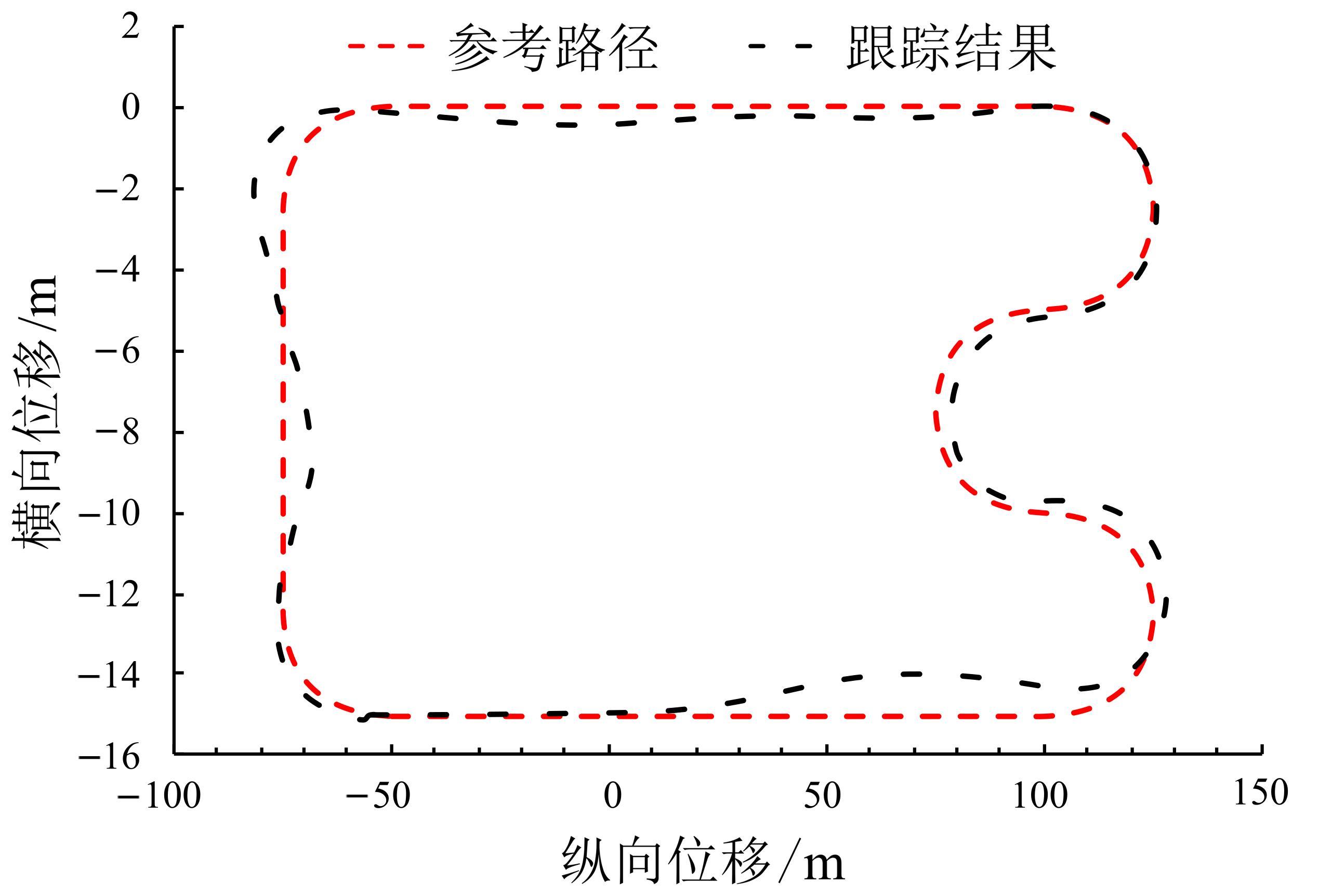

Fig. 20
Change circumstances of gain matrix of L Q R o b s of obstacle avoidance (experiments)
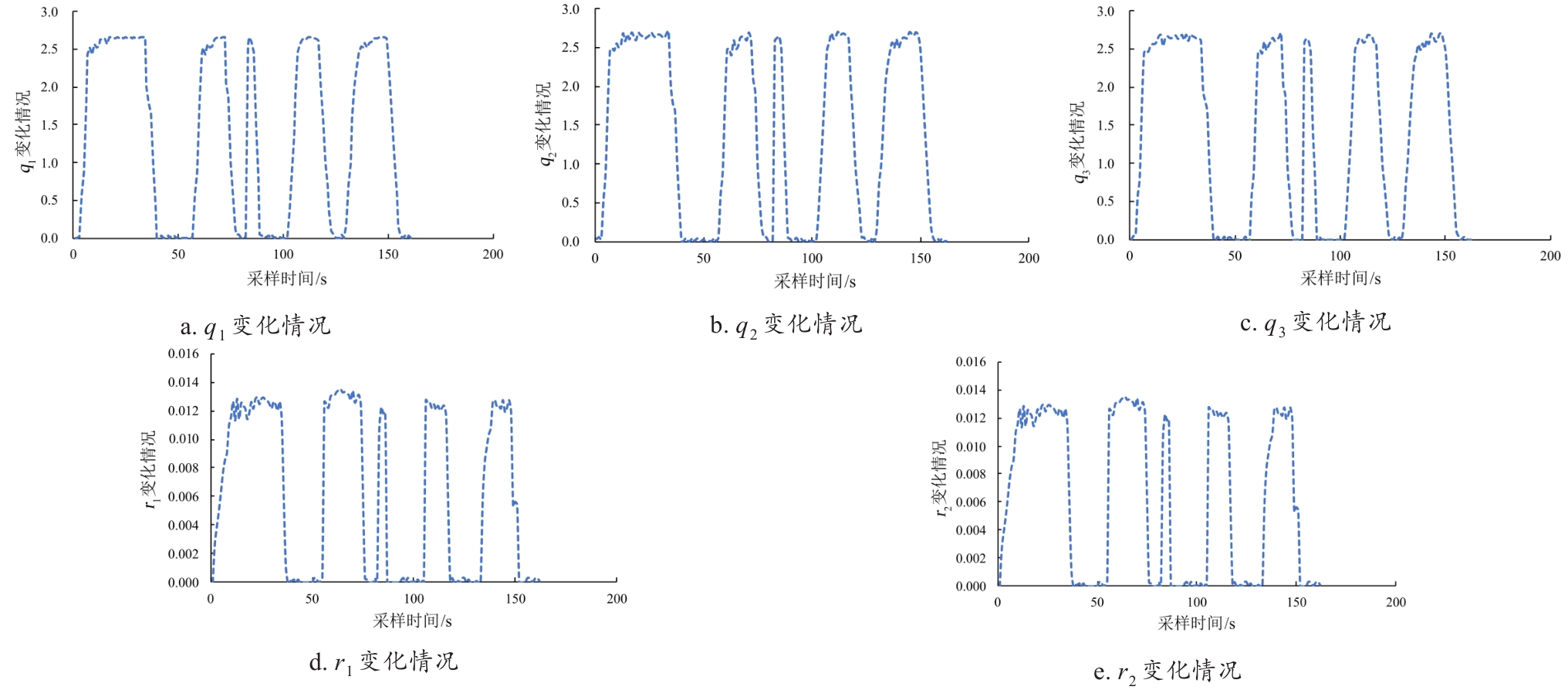

Fig. 21
Obstacle avoidance and tracking results of chassis under a single obstacle (experimental)

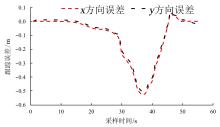
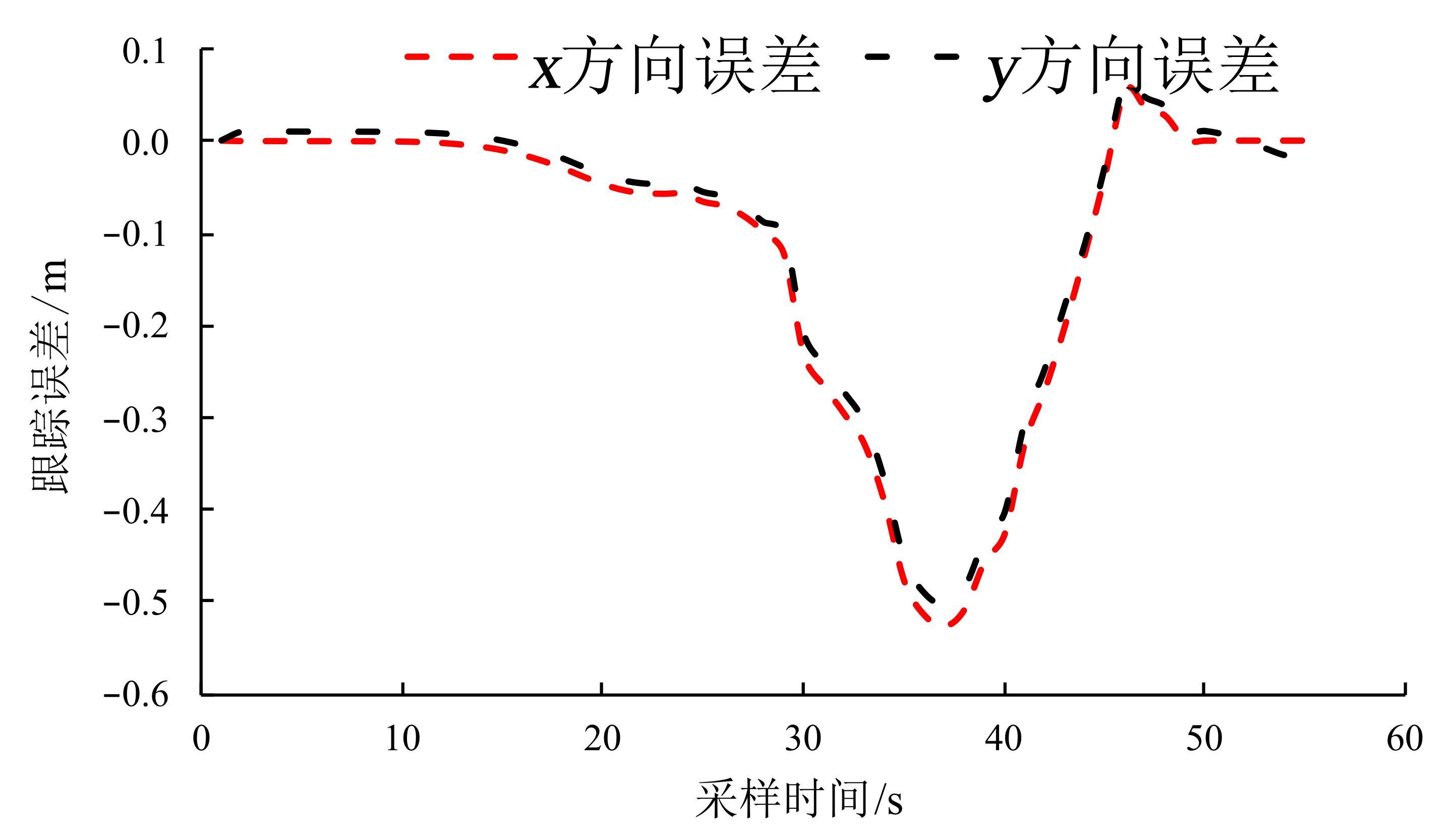
Fig. 22
Lateral and longitudinal tracking errors of chassis under a single obstacle (experiments)
| [1] |
代辛, 管寿青, 王元杰. "走出去"助力中国农机装备新质生产力发展[J]. 农业展望, 2024, 20(11): 3-9.
|
|
|
|
| [2] |
重庆市农业科学院. 基于模糊逻辑控制的电动农机滑移、转向、避障控制系统及方法:202411485474.X[P]. 2025-01-24.
|
| [3] |
|
| [4] |
|
| [5] |
陈建, 王艺霏. 无人驾驶拖拉机路径跟踪控制方法综述[J]. 农机化研究, 2024, 46(8): 1-7.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
王鑫, 凌铭, 饶启鹏, 等. 基于改进Stanley算法的无人车路径跟踪融合算法研究[J]. 汽车技术, 2022(7): 25-31.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
张锦辉, 李彦明, 齐文超, 等. 基于神经网络PID的丘陵山地拖拉机姿态同步控制系统[J]. 农业机械学报, 2020, 51(12): 356-366.
|
|
|
|
| [20] |
严国军, 贲能军, 顾建华, 等. 基于MPC的无人驾驶拖拉机轨迹跟踪控制[J]. 重庆交通大学学报(自然科学版), 2019, 38(9): 1-6.
|
|
|
|
| [21] |
|
| [22] |
贺庆, 冀杰, 冯伟, 等. 割草机器人自适应时域MPC路径跟踪控制方法[J]. 智慧农业(中英文), 2024, 6(3): 82-93.
|
|
|
|
| [23] |
|
| [24] |
赵立军, 贾云帆, 殷文科, 等. 基于模型预测控制的履带式除草机器人设计与试验[J]. 智能化农业装备学报(中英文), 2024, 5(4): 84-94.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
潘良, 佘小明, 傅川, 等. 小型通用轮式电动底盘设计与试验[J]. 农机化研究, 2023, 45(9): 240-244.
|
|
|
| [1] | LUAN Shijie, SUN Yefeng, GONG Liang, ZHANG Kai. Trajectory Tracking Method of Agricultural Machinery Multi-Robot Formation Operation Based on MPC Delay Compensator [J]. Smart Agriculture, 2024, 6(3): 69-81. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







