Smart Agriculture ›› 2025, Vol. 7 ›› Issue (4): 141-158.doi: 10.12133/j.smartag.SA202505008
卫培刚1,2, 曹姗姗1,2, 刘继芳1,2, 刘振虎4, 孙伟1,2( ), 孔繁涛2,3()
), 孔繁涛2,3()
收稿日期:2025-05-09
出版日期:2025-07-30
基金项目:作者简介:卫培刚,博士研究生,研究方向为具身智能机器人、多智能体系统。E-mail:wpg0115@163.com
通信作者:
WEI Peigang1,2, CAO Shanshan1,2, LIU Jifang1,2, LIU Zhenhu4, SUN Wei1,2(), KONG Fantao2,3()
Received:2025-05-09
Online:2025-07-30
Foundation items:National Key R&D Programme Project(2024YFD2000305); Science and Technology Innovation Project of the Chinese Academy of Agricultural Sciences(10-IAED-RC-09-2025)
About author:WEI Peigang, E-mail: wpg0115@163.com
Corresponding author:摘要:
【目的/意义】 随着农业智能化转型加速推进,具身智能作为融合环境感知、信息认知、自主决策与采取行动于一体的智能系统,正为农业机器人赋予更强的自主感知与复杂环境适应能力,成为推动农业智能机器人发展的重要方向。本文系统地梳理了具身智能在农业机器人领域的技术体系与应用实践,揭示其在提高环境适应性、决策自主性和作业灵活性方面的重要价值,为推动农业机器人向更高水平发展提供理论与实践参考。 【进展】 本文首先归纳了具身智能农业机器人的关键支撑技术,包括多模态融合感知、智能自主决策、自主行动控制与反馈自主学习。随后分析了具身智能在农业中的典型应用场景,构建了以“具身感知-具身认知-具身执行-具身进化”组成的核心框架,并结合农业场景对其在各个方面的实现路径进行了分类探讨。最后深入剖析了当前面临的技术瓶颈与落地挑战,包括系统集成约束多、数据虚实差距大、场景泛化能力弱等问题。 【结论/展望】 从高质量数据集与仿真平台构建、领域大模型融合应用、分层协同架构设计等方面对具身智能农业机器人的未来发展趋势进行了展望,为具身智能农业机器人的研究者与工程实践者提供参考。
中图分类号:
卫培刚, 曹姗姗, 刘继芳, 刘振虎, 孙伟, 孔繁涛. 具身智能农业机器人:关键技术、应用分析、挑战与展望[J]. 智慧农业(中英文), 2025, 7(4): 141-158.
WEI Peigang, CAO Shanshan, LIU Jifang, LIU Zhenhu, SUN Wei, KONG Fantao. Embodied Intelligent Agricultural Robots: Key Technologies, Application Analysis, Challenges and Prospects[J]. Smart Agriculture, 2025, 7(4): 141-158.
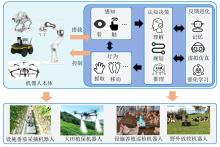
图1
具身智能农业机器人内涵及其应用领域
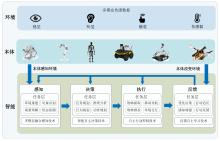
图2
具身智能关键技术体系


图3
MAT的编码器-解码器体系结构[31]
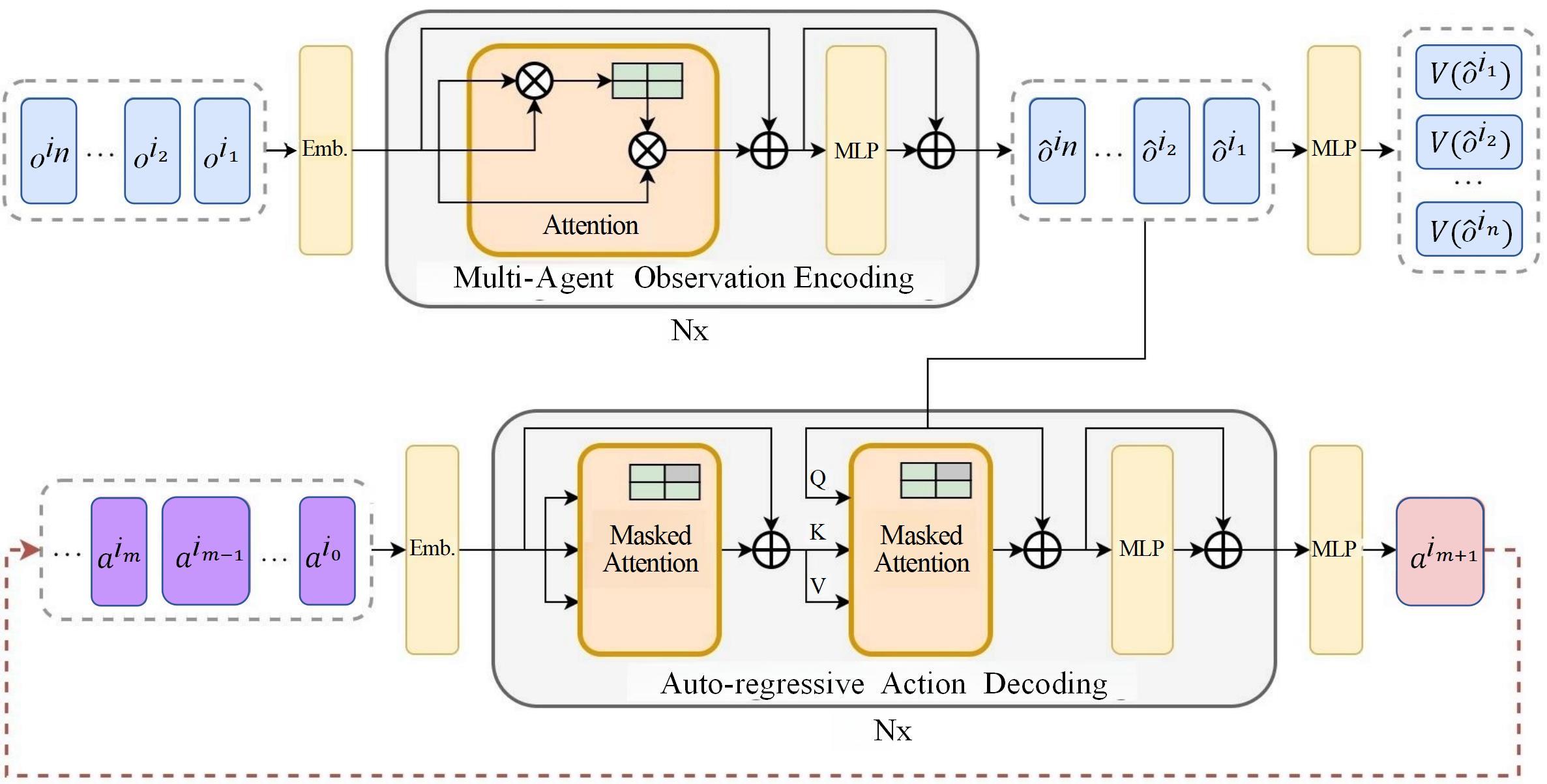

图4
具身智能“本体-环境-智能”三要素示意图


图5
具身智能在农业机器人应用场景
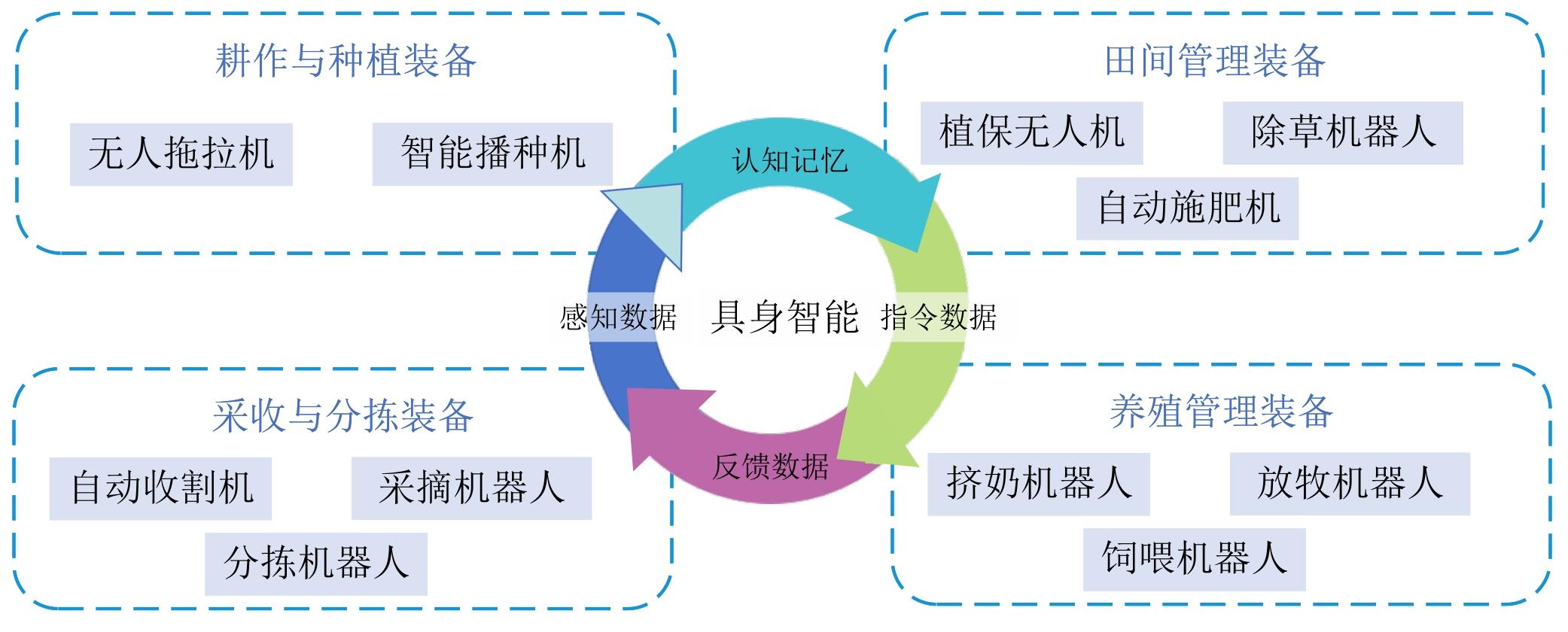

图6
具身智能农业机器人核心框架

表1
具身感知不同技术方向的代表性工作
| 技术方向 | 技术方法 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| 多模态信息融合 | 基于线性的融合 | 简单易用,适用性强,可处理同质或异质数据,具有较低的计算复杂度 | 难以充分利用不同模态在语义、空间或时间层次上的深层互补性,复杂交互建模能力有限 | [ |
| 基于多流分支的融合 | 更强的模态互补性,易于扩展更多模态分支,适应多源异构数据场景 | 计算复杂度高,对各模态数据质量要求较高,对噪声与数据缺失敏感 | [ | |
| 基于多阶段的渐进式融合 | 通过渐进式融合避免信息排斥,允许不同模态在各级别交互 | 模型复杂度与计算成本高、动态适应性局限、各阶段融合依赖性强 | [ | |
| 基于Transformer的融合 | 强大的特征提取能力,通过整合浅层特征,能够保留更多的细节信息 | 模态对齐效果需要进一步优化,模型的复杂性和计算效率仍需平衡 | [ | |
| 动态场景三维感知 | 基于视觉的三维感知 | 硬件成本低,物体色彩和纹理信息丰富,可融合多帧信息进行结构恢复,较强的场景理解能力 | 对光照变化敏感,易受遮挡和低纹理区域影响;几何精度和深度估计依赖结构假设,鲁棒性较差;跟踪和重建精度低,易失效于动态物体 | [ |
| 基于LiDAR的三维感知 | 能够提供高精度的3D动态目标位置信息,环境鲁棒性强,易于构建高精地图和物体检测 | 硬件成本高,模型训练推理成本大;点云数据存在稀疏性和不规则性,数据处理和分析比其他数据更为复杂 | [ | |
| 基于跨模态知识蒸馏的三维感知 | 利用教师模型监督学生模型,融合LiDAR的几何精度与视觉的语义信息,提升检测鲁棒性;可实现轻量化部署,适用于资源受限平台 | 蒸馏过程依赖高质量标签或教师模型,训练成本高;模态差异大时易导致知识迁移失效,蒸馏性能受限于教师模型质量与模态对齐程度 | [ | |
| 场景自适应 | 无监督领域自适应 | 无需目标域标注,适用于真实场景中标注缺失或成本高昂的情况;通过生成对抗网络、自编码器等方法对齐源域与目标域特征分布,迁移范围广 | 难以精确对齐语义级别的特征,易出现负迁移;训练复杂度高,实时性优化困难,边缘计算设备部署受限 | [ |
| 半监督领域自适应 | 少量目标域标签数据可校准模型,精度提升显著;通过标签监督降低跨域语义歧义,适用于目标域场景复杂度高的任务 | 需权衡标注成本与性能增益,标签依赖仍存在;相较无监督领域自适应(Unsupervised Domain Adaptation, UDA),训练流程更复杂,需额外设计标签筛选与质量控制机制 | [ |

图7
具身认知任务规划及执行示例
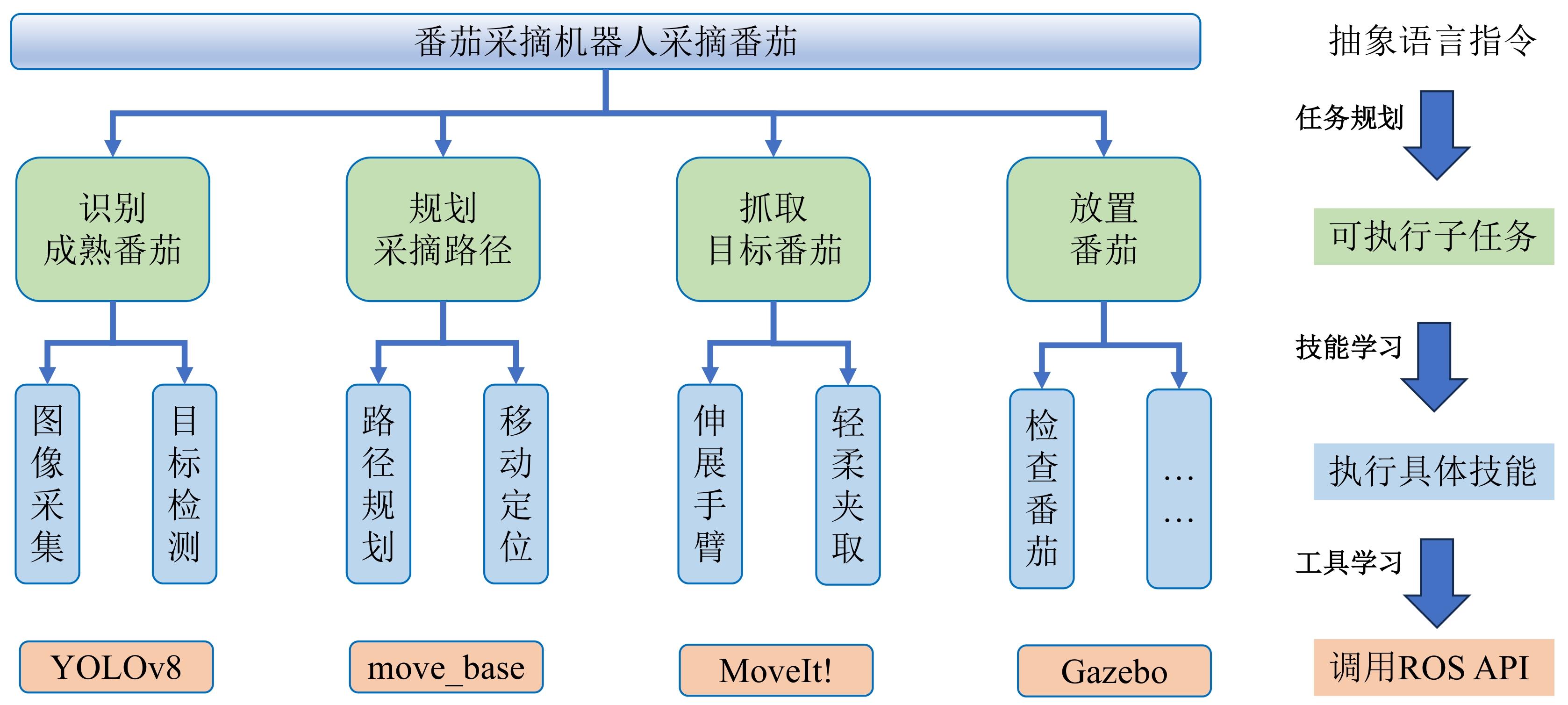
表2
具身认知不同技术方向的代表性工作
| 技术方向 | 技术方法 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| 基于规则驱动 | 有限状态机、专家系统 | 实现简单,控制逻辑明确;在结构化、稳定的作业场景中表现良好 | 灵活性不足,难以应对动态环境变化;规则需手动设计和频繁更新 | [ |
| 基于专家示范驱动 | 模仿学习、行为克隆、逆向强化学习 | 能直接借鉴专家经验;更好地适应复杂多变的作业环境;可从真实操作数据中学习 | 数据采集成本高,依赖专家示范数据质量;泛化能力可能受限于示范场景 | [ |
| 基于大模型驱动 | 视觉语言模型、多模态大模型、视觉行为编码器 | 泛化能力强,适应性更高;能融合多模态数据(视觉、传感器等);可通过在线学习不断优化 | 对数据和计算资源要求较高;模型复杂,解释性较差;调试与调优较为困难 | [ |
表3
具身执行不同技术方向的代表性工作
| 技术方向 | 技术方法 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| 基于自然语言交互学习 | 基于大模型的机器人在线纠错框架、语言模型预测控制框架、多上下文模仿学习方法 | 支持人类实时语言指导,适应性强;能从语言中抽象通用规则,利于跨任务泛化;适用于动态环境中行为调整和快速纠偏 | 需依赖强大语言理解能力,受限于模型准确率;需将语言指令与环境状态有效绑定,复杂场景感知局限;性能受限于预训练大模型能力和算力成本 | [ |
| 基于视觉可供性学习 | 基于可供性预测网络的机器人控制框架、物体-物体的可供性学习框架 | 动作预测基于物理交互可行性,精准可控;无需显示符号表示,视觉到动作一体化,物理约束融合强,适用于抓取、移动操作任务 | 标注成本高,对未见场景/物体的适应性较差;易受限于感知精度与遮挡干扰;对任务意图和语义规则处理能力弱于语言驱动方法 | [ |
表4
具身进化不同技术方向的代表性工作
| 技术方向 | 技术方法/工具 | 优势 | 不足 | 代表性工作 |
|---|---|---|---|---|
| DERL | CGP、GA-DRL、Supe-RL | 形态-策略协同优化,可跳出局部最优,适应性强,适用于不确定、高动态环境 | 进化过程需要大量样本与仿真时间,虚拟环境中训练的策略与结构迁移到现实难度大 | [ |
| 虚拟仿真学习 | 格物、Genesis、Habitat | 数据获取低成本高效率,安全可控,适合极端或危险任务模拟,支持策略快速迭代与泛化检验 | 高质量仿真环境构建复杂,仿真现实差距导致迁移后性能下降 | [ |
| OCL | 正则化约束方法、经验回放机制、优化策略调整、表征解耦技术和动态架构扩展 | 支持动态环境适应,针对作物生长、天气变化等时变因素在线调整策略,适用于构建长期智能 | 新任务引入可能导致旧任务性能大幅下降,需平衡记忆成本、模型容量与计算开销,避免负迁移或干扰旧知识 | [ |
| [1] |
李道亮. 我国农业机器人技术与发展趋势[J]. 人民论坛, 2024(24): 70-74.
|
|
|
|
| [2] |
赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15.
|
|
|
|
| [3] |
何勇, 黄震宇, 杨宁远, 等. 设施农业机器人导航关键技术研究进展与展望[J]. 智慧农业(中英文), 2024, 6(5): 1-19.
|
|
|
|
| [4] |
卢策吾,王鹤. 具身智能(Embodied Artificial Intelligence)[EB/OL]. (2023-07-22)[2025-04-16].
|
| [5] |
张伟男, 刘挺. 具身智能的研究与应用[J]. 智能系统学报, 2025, 20(1): 255-262.
|
|
|
|
| [6] |
|
| [7] |
沈甜雨, 李志伟, 范丽丽, 等. 具身智能驾驶: 概念、方法、现状与展望[J]. 智能科学与技术学报, 2024, 6(1): 17-32.
|
|
|
|
| [8] |
李颂元, 朱祥维, 李玺. 基座模型技术背景下的具身智能体综述[J]. 浙江大学学报(工学版), 2025, 59(2): 213-226, 268.
|
|
|
|
| [9] |
|
| [10] |
李兴旭, 陈雯柏, 王一群, 等. 基于级联视觉检测的樱桃番茄自动采收系统设计与试验[J]. 农业工程学报, 2023, 39(1): 136-145.
|
|
|
|
| [11] |
中国信息通信研究院, 北京人形机器人创新有限公司. 具身智能发展报告(2024年)[R/OL]. [2025-04-16].
|
| [12] |
罗锡文, 廖娟, 胡炼, 等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报, 2021, 42(6): 8-17, 5.
|
|
|
|
| [13] |
万欢, 欧媛珍, 管宪鲁, 等. 无人农机作业环境感知技术综述[J]. 农业工程学报, 2024, 40(8): 1-18.
|
|
|
|
| [14] |
姜龙腾, 迟瑞娟, 马悦琦, 等. 基于栅格法的农业机器人路径规划方法研究[J]. 农机化研究, 2024, 46(6): 19-24.
|
|
|
|
| [15] |
蒋心璐, 陈天恩, 王聪, 等. 大田环境下的农业害虫图像小目标检测算法[J]. 计算机工程, 2024, 50(1): 232-241.
|
|
|
|
| [16] |
赵宁磊, 程曼, 袁洪波, 等. 羊舍自主巡检机器人设计与试验[J]. 中国农机化学报, 2025, 46(1): 78-84.
|
|
|
|
| [17] |
高金喆, 寇志伟, 孔哲, 等. 基于激光雷达的牧场巡检机器人定位与建图算法设计[J]. 中国农机化学报, 2024, 45(4): 222-230.
|
|
|
|
| [18] |
付辰伏, 任力生, 王芳. 自动化场景区分下FABF-YOLOv8s轻量化肉牛行为识别方法[J]. 农业工程学报, 2024, 40(15): 152-163.
|
|
|
|
| [19] |
许成果, 薛月菊, 郑婵, 等. 基于自注意力机制与无锚点的仔猪姿态识别[J]. 农业工程学报, 2022, 38(14): 166-173.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
汪小旵, 祁子涵, 杨震宇, 等. 基于DAV_DWA算法的农业机器人局部路径规划[J]. 农业机械学报, 2025, 56(2): 105-114.
|
|
|
|
| [26] |
董豪, 杨静, 李少波, 等. 基于深度强化学习的机器人运动控制研究进展[J]. 控制与决策, 2022, 37(2): 278-292.
|
|
|
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
AHN M,
|
| [37] |
|
| [38] |
|
| [39] |
李善军, 宋竹平, 梁千月, 等. 基于X-ray和RGB图像融合的实蝇侵染柑橘无损检测[J]. 农业机械学报, 2023, 54(1): 385-392.
|
|
|
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
卞立平, 吕滢, 罗智彬, 等. 基于区块链技术的食品溯源在元宇宙中的应用构想与设计[J]. 智能化农业装备学报(中英文), 2023(4): 11-19.
|
|
|
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
孙水发, 汤永恒, 王奔, 等. 动态场景的三维重建研究综述[J]. 计算机科学与探索, 2024, 18(4): 831-860.
|
|
|
|
| [56] |
蔡瑞初, 李嘉豪, 郝志峰. 基于类内最大均值差异的无监督领域自适应算法[J]. 计算机应用研究, 2020, 37(8): 2371-2375.
|
|
|
|
| [57] |
|
| [58] |
陶洋, 杨雯, 翁善, 等. 基于迁移子空间的半监督领域自适应方法[J]. 计算机工程与设计, 2021, 42(8): 2308-2315.
|
|
|
|
| [59] |
姚明海, 黄展聪. 基于主动学习的半监督领域自适应方法研究[J]. 高技术通讯, 2020, 30(8): 783-789.
|
|
|
|
| [60] |
|
| [61] |
温舒智, 彭丽莎, 刘杨博, 等. 基于有限状态机的管道自爬行机器人研制[J]. 制造业自动化, 2024, 46(9): 15-19, 214.
|
|
|
|
| [62] |
杨伟志, 孙道宗, 刘建梅, 等. 基于物联网和人工智能的柑橘灌溉专家系统[J]. 节水灌溉, 2019(9): 116-120, 124.
|
|
|
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [1] | 何勇, 黄震宇, 杨宁远, 李禧尧, 王玉伟, 冯旭萍. 设施农业机器人导航关键技术研究进展与展望[J]. 智慧农业(中英文), 2024, 6(5): 1-19. |
| [2] | 刘洋, 冀杰, 潘登, 赵立军, 李明生. 基于激光雷达与IMU融合的农业机器人定位方法[J]. 智慧农业(中英文), 2024, 6(3): 94-106. |
| [3] | 赵春江, 范贝贝, 李瑾, 冯青春. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15. |
| [4] | 周龙港, 刘婷, 卢劲竹. 基于Floyd和改进遗传算法的丘陵地区农田遍历路径规划[J]. 智慧农业(中英文), 2023, 5(4): 45-57. |
| [5] | 冯青春, 王秀, 邱权, 张春凤, 李斌, 徐瑞峰, 陈立平. 畜禽舍防疫消毒机器人设计与试验[J]. 智慧农业(中英文), 2020, 2(4): 79-88. |
| [6] | 郭威, 吴华瑞, 朱华吉. 设施温室影像采集与环境监测机器人系统设计及应用[J]. 智慧农业(中英文), 2020, 2(3): 48-60. |
| [7] | 冯青春, 陈建, 成伟, 王秀. 面向番茄植株相近色目标识别的多波段图像融合方法[J]. 智慧农业(中英文), 2020, 2(2): 126-134. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||







