Smart Agriculture ›› 2024, Vol. 6 ›› Issue (2): 49-61.doi: 10.12133/j.smartag.SA202311007
• Special Issue--Agricultural Information Perception and Models • Previous Articles Next Articles
ZHANG Ronghua1, BAI Xue1, FAN Jiangchuan2,3( )
)
Received:2023-11-02
Online:2024-03-30
Foundation items:Beijing Nova Program(Z211100002121065;Z20220484202); National Key Research and Development Program(2022YFD2002302-02)
About author:ZHANG Ronghua, E-mail: zhangronghua@pku.org.cn
corresponding author:
ZHANG Ronghua, BAI Xue, FAN Jiangchuan. Crop Pest Target Detection Algorithm in Complex Scenes:YOLOv8-Extend[J]. Smart Agriculture, 2024, 6(2): 49-61.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202311007

Fig. 1
Samples of insect pest image data

Table 1
Target statistics of various pest detection datasets
| 类别 | 训练集 | 验证集 | 测试集 | 总计 |
|---|---|---|---|---|
| 蝽卵 | 748 | 111 | 110 | 969 |
| 稻螟蛉 | 1 586 | 128 | 180 | 1 894 |
| 大螟幼虫 | 789 | 80 | 125 | 994 |
| 红白蝙蝠蛾 | 385 | 60 | 39 | 484 |
| 黄肩型稻绿椿 | 835 | 205 | 151 | 1 191 |
| 点斑型稻绿蝽 | 924 | 171 | 115 | 1 210 |
| 全绿型稻绿蝽 | 778 | 95 | 113 | 986 |
| 蝗虫 | 1 245 | 189 | 240 | 1 674 |
Fig. 2
Network architecture of YOLOv8-Extend
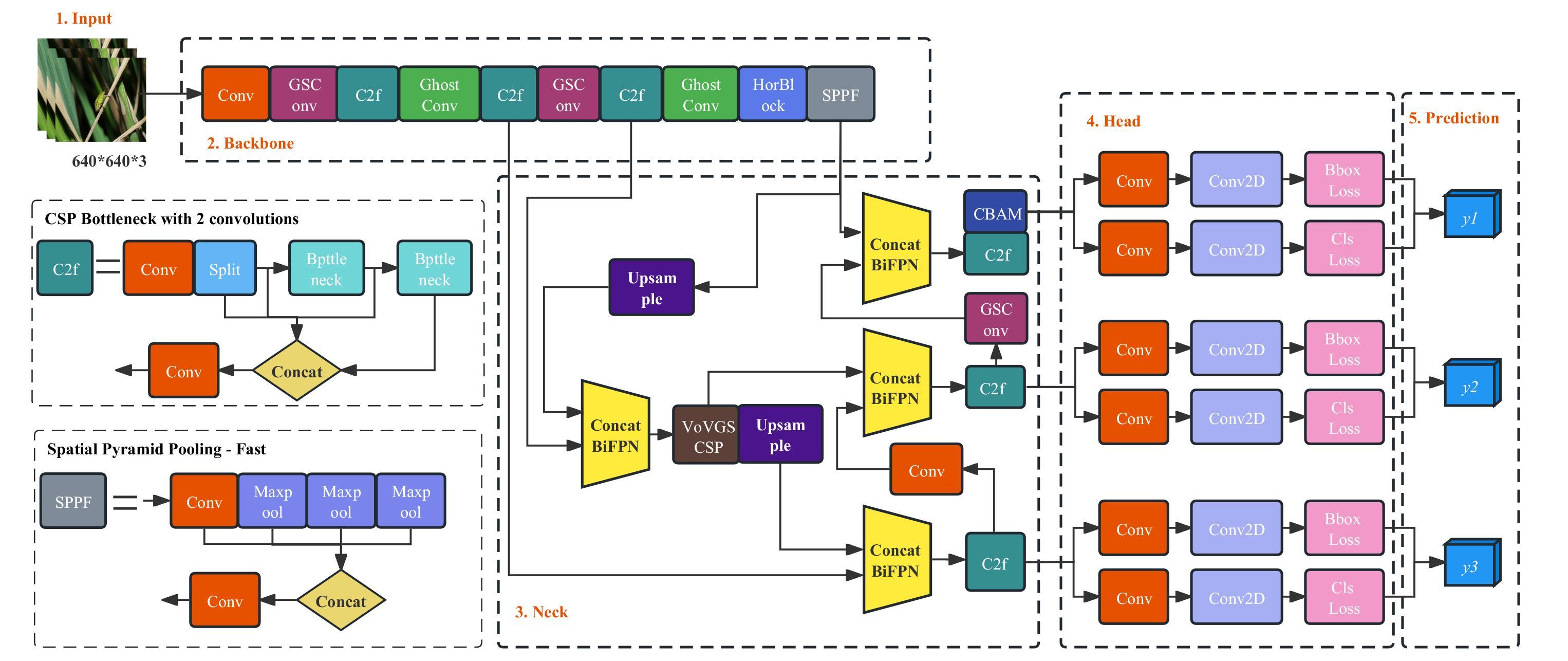

Fig. 3
GSConv module structure
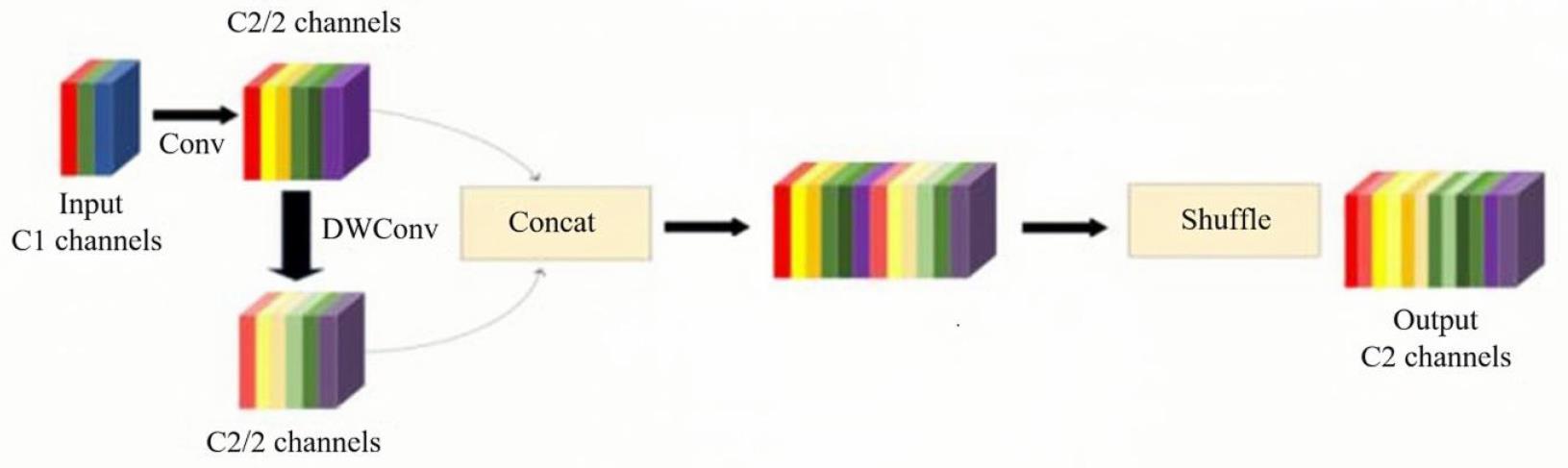
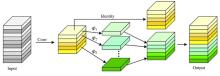
Fig. 4
Module structure of GhostConv
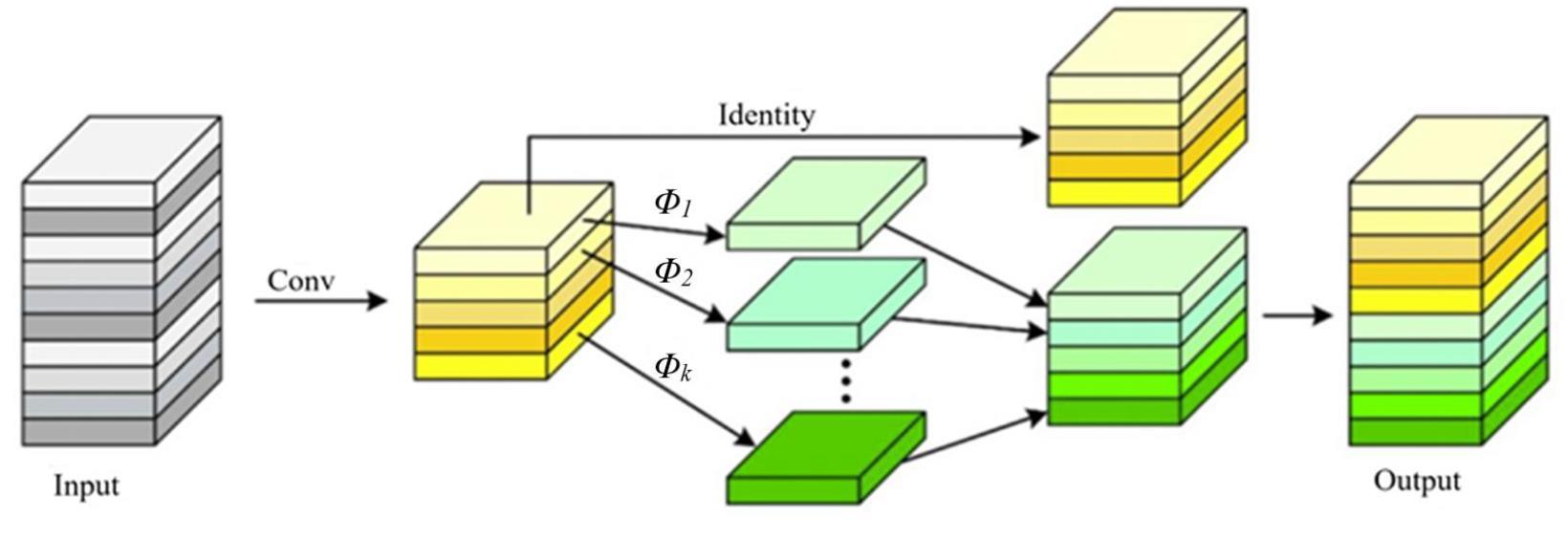
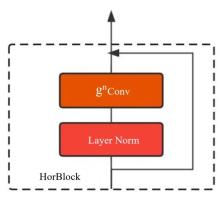
Fig. 5
Module structure of HorBlock
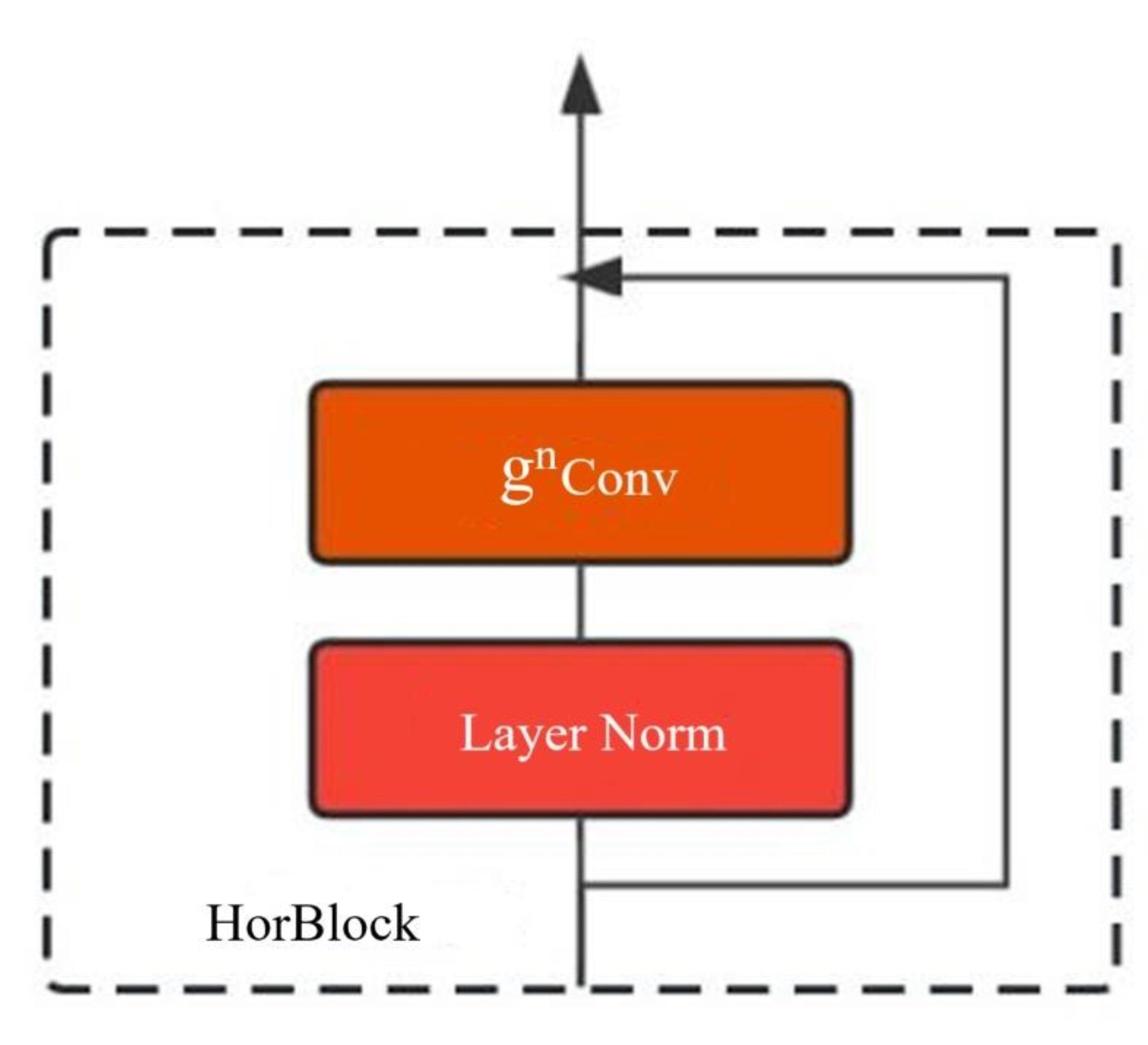

Fig. 6
Module structure of BiFPN
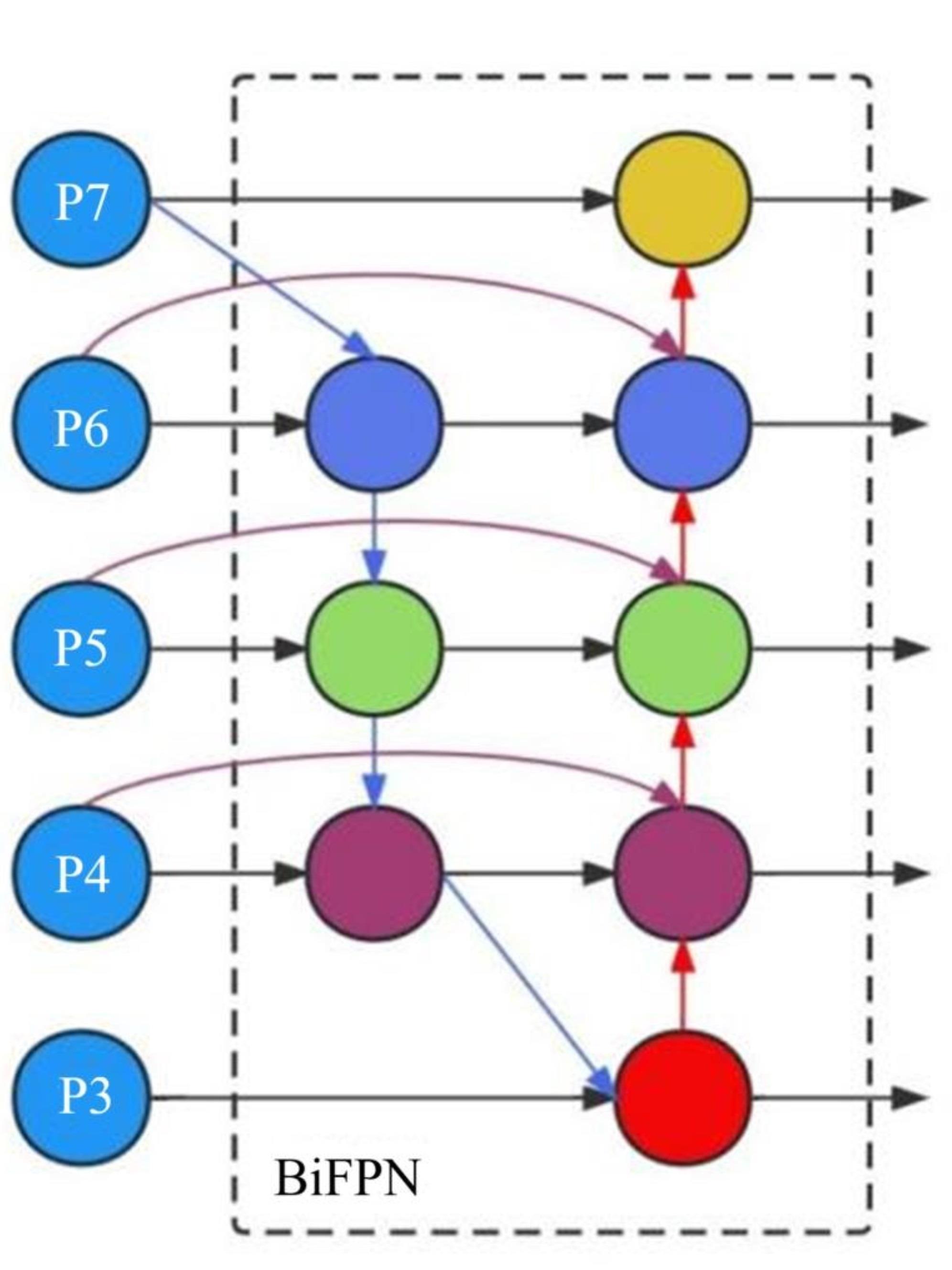
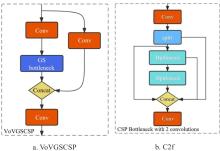
Fig. 7
Network architectures of C2f and VoVGSCSP
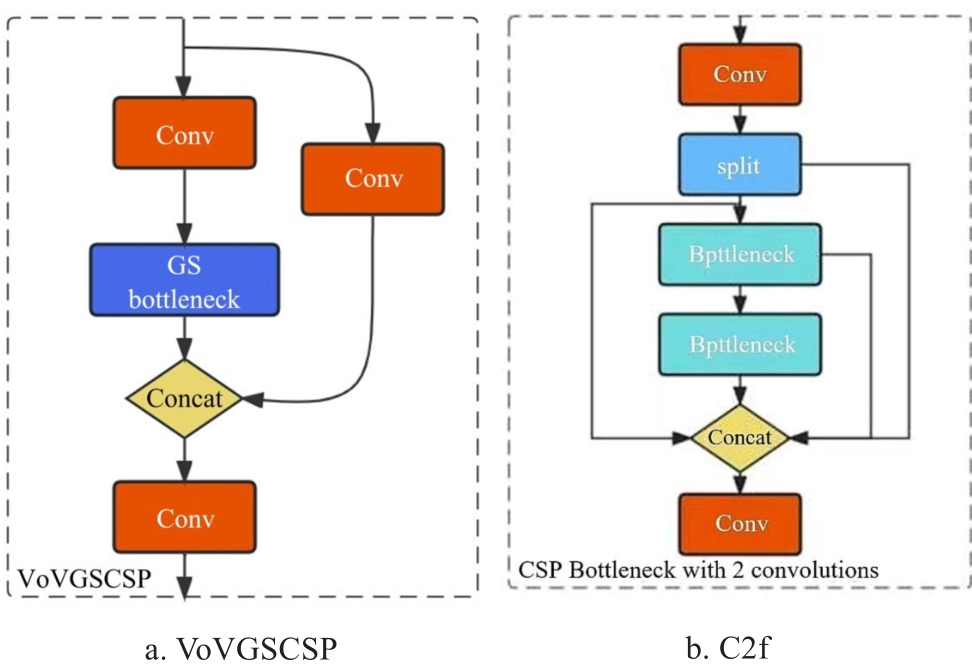
Table 2
Configuration of software and hardware environment for model training
| 名称 | 试验配置 |
|---|---|
| 编程语言 | Python3.9 |
| 深度学习框架 | Pytorch2.0.1 |
| CPU | Intel(R)Core(TM)i9-10900X CPU @3.70 GHz |
| 内存 | 128 GB |
| GPU | NVIDIA GeForce RTX 3090 |
| CUDA | 11.7 |
| 开发平台 | Pycharm 2022.2 |
Table 3
Configuration of model training hyperparameter
| 名称 | 试验配置 |
|---|---|
| Epochs | 200 |
| Batch_size | 64 |
| Momentum | 0.937 |
| Weight decay | 0.000 5 |
| Learn rate | 0.01 |
| Optimizer | Adam |
| Workers | 4 |
| Imgsz | 640 |

Fig. 8
Evaluation results of YOLOv8-Extend model training
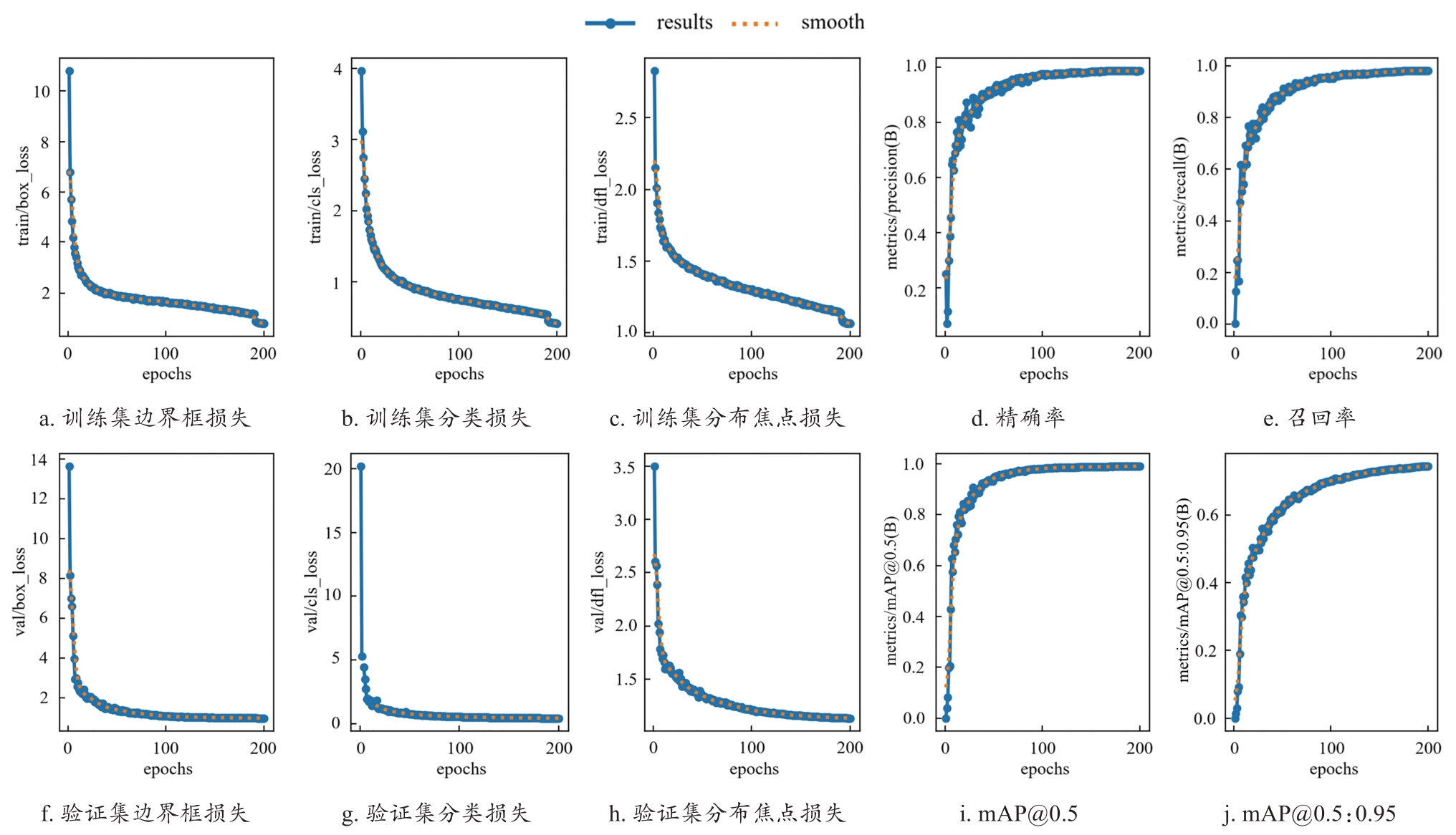

Fig. 9
PR training curve of YOLOv8-Extend model
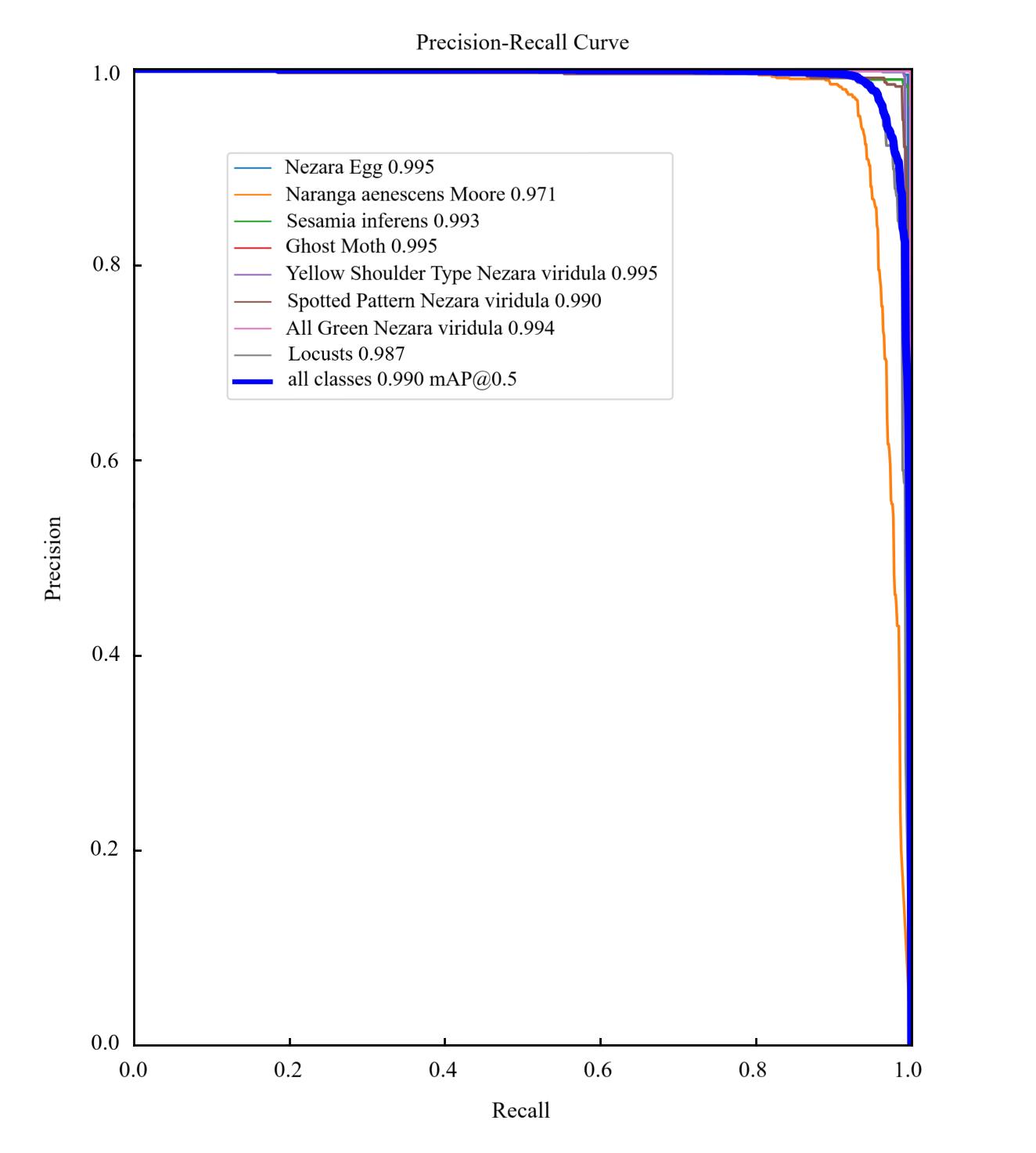

Fig. 10
Comparison of feature heat maps before and after the improvement of the YOLOv8 model
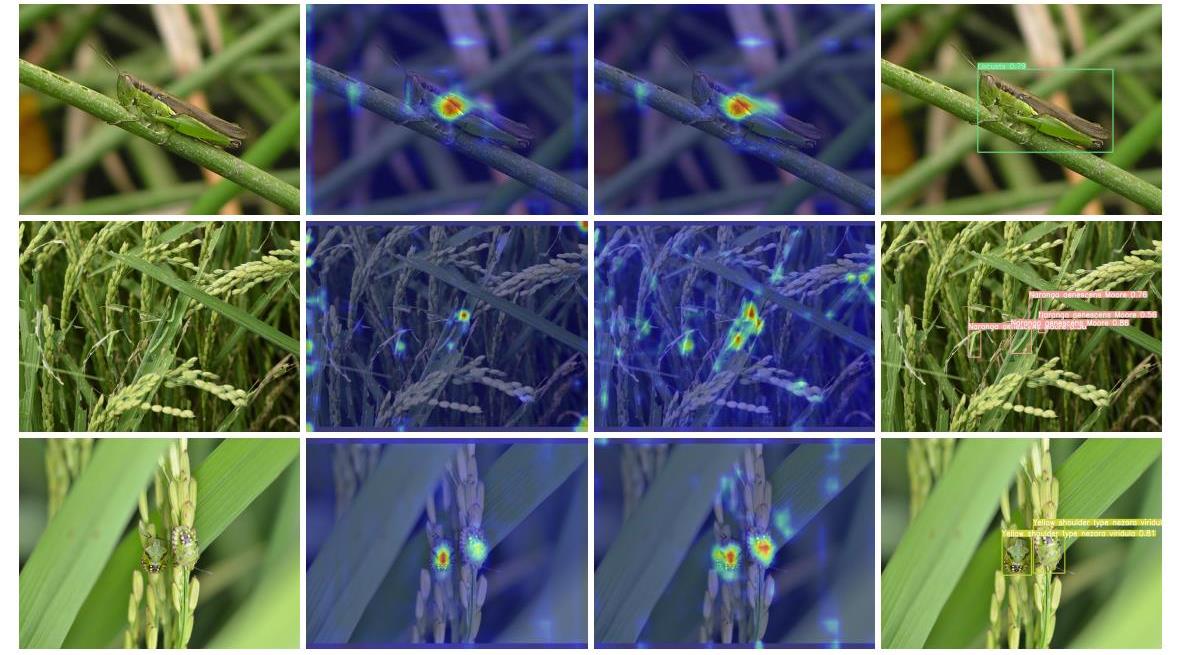
Fig. 11
Evaluation metrics for the YOLOv8n-Extend model training ablation experiment
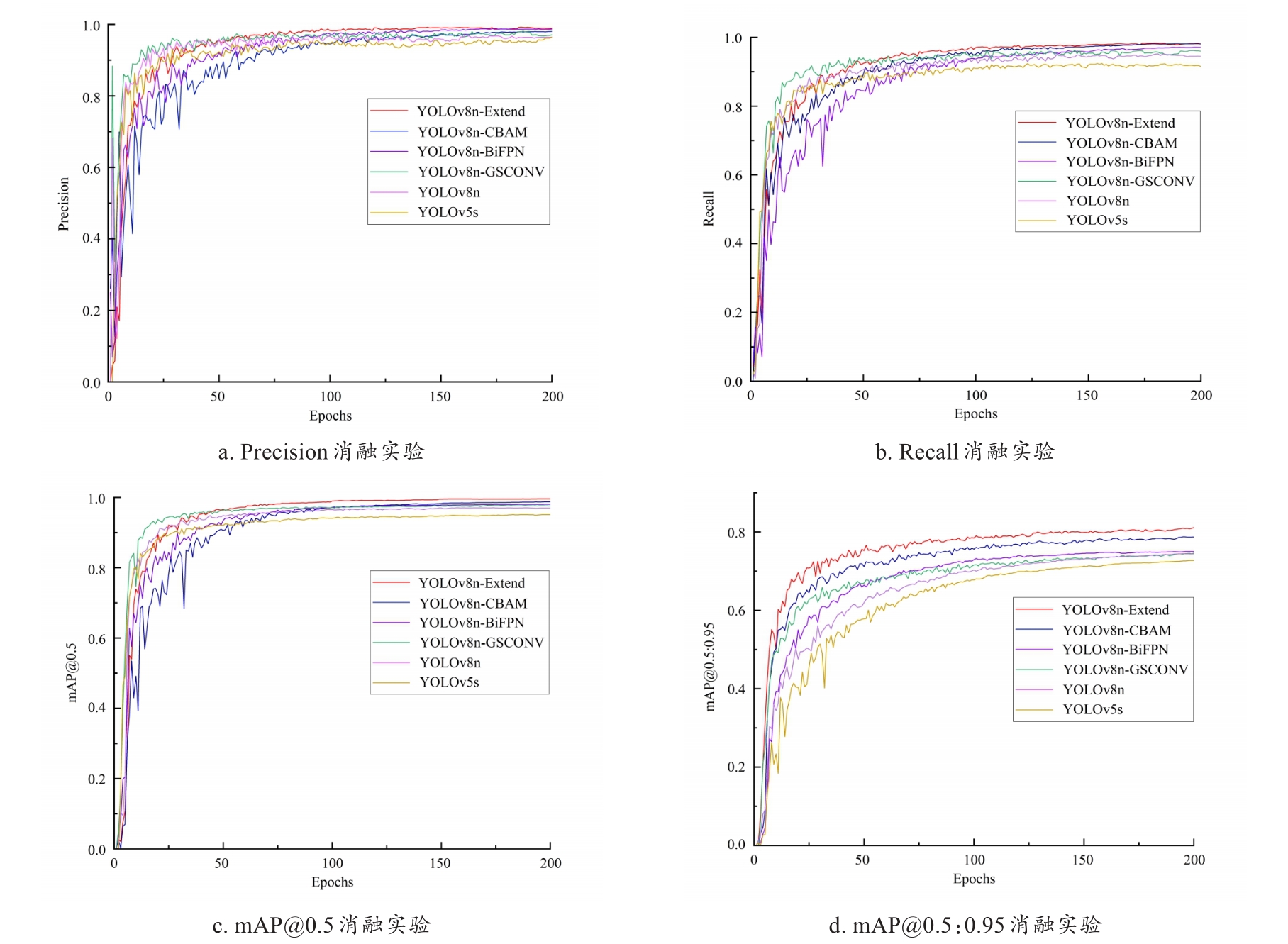
Table 4
YOLOv8n-Extend improved algorithm ablation experiment
| Methods | Precision | Recall | mAP@0.5 | mAP@0.5∶0.95 | Modelsize/M | FPS |
|---|---|---|---|---|---|---|
| YOLOv5s | 0.959 | 0.91 | 0.947 | 0.721 | 13.70 | 66.7 |
| YOLOv8n | 0.958 | 0.939 | 0.964 | 0.739 | 5.93 | 72.6 |
| YOLOv8n-GSCONV | 0.965 | 0.954 | 0.970 | 0.741 | 20.20 | 56.4 |
| YOLOv8n-BiFPN | 0.982 | 0.975 | 0.975 | 0.745 | 5.93 | 68.5 |
| YOLOv8n-CBAM | 0.975 | 0.976 | 0.982 | 0.783 | 5.95 | 62.6 |
| YOLOv8n-Extend | 0.984 | 0.975 | 0.99 | 0.811 | 6.07 | 65.5 |
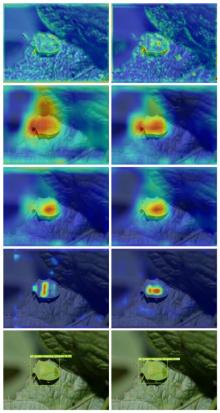
Fig. 12
Heat maps of different stages of YOLOv8 model before and after improvement
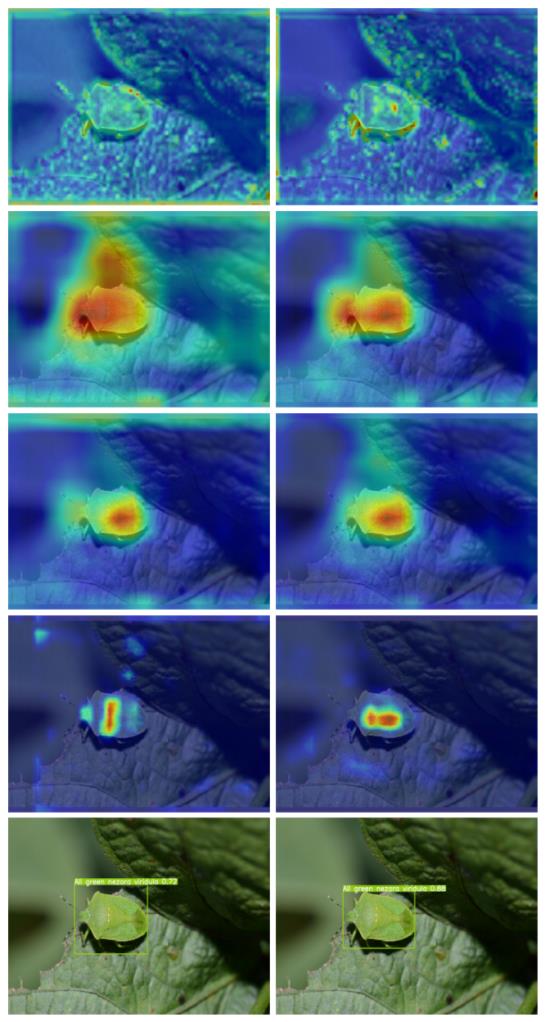
Table 5
Model inference computer terminal and edge computing ablation experiment
| Methods | mAP@0.5 | FPS |
|---|---|---|
| YOLOv5s | 0.947 | 66.7 |
| YOLOv5s-Jetson | 0.912 | 54.7 |
| YOLOv8n | 0.964 | 72.6 |
| YOLOv8n-Jetson | 0.922 | 62.8 |
| YOLOv8n-Extend | 0.990 | 65.5 |
| YOLOv8n-Extend-Jetson | 0.968 | 57.6 |

Fig. 13
Real data detection results before and after improvement of YOLOv8 model

Table 6
The accuracy of YOLOv8-Extend model's classification and detection of actual data before and after improvement
| Methods | 简单(330张) | 中等(420张) | 困难(220张) |
|---|---|---|---|
| YOLOv8n | 0.986 | 0.923 | 0.726 |
| YOLOv8n-Extend | 0.993 | 0.955 | 0.845 |
| 1 |
李健, 陈长明. 基于计算机视觉的农作物害虫自动检测研究综述[J]. 微型电脑应用, 2009, 25(12): 62-64, 78.
|
|
|
|
| 2 |
刁智华, 王欢, 宋寅卯, 等. 复杂背景下棉花病叶害螨图像分割方法[J]. 农业工程学报, 2013, 29(5): 147-152.
|
|
|
|
| 3 |
宋勇, 陈兵, 王琼, 等. 基于无人机多光谱影像的棉花黄萎病监测[J]. 棉花学报, 2023, 35(2): 87-100.
|
|
|
|
| 4 |
张楠楠, 张晓, 白铁成, 等. 基于CBAM-YOLO v7的自然环境下棉叶病虫害识别方法[J]. 农业机械学报, 2023, 54(S1): 239-244.
|
|
|
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
王建, 徐闯. 基于YOLOv5s的脐橙虫害检测研究[J]. 工业控制计算机, 2023, 36(7): 105-106, 109.
|
|
|
|
| 17 |
|
| 18 |
何颖. 基于改进YOLOv5模型的经济林木虫害目标检测算法研究[D]. 昆明: 云南农业大学, 2022.
|
|
|
|
| 19 |
|
| 20 |
|
| 21 |
魏陈浩, 杨睿, 刘振丙, 等. 具有双层路由注意力的YOLOv8道路场景目标检测方法[J]. 图学学报, 2023, 44(6): 1104-1111.
|
|
|
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
WOO S,
|
| 28 |
|
| 29 |
高腾, 张先武, 李柏. 深度学习在安全帽佩戴检测中的应用研究综述[J]. 计算机工程与应用, 2023, 59(6): 13-29.
|
|
|
|
| 30 |
|
| 31 |
|
| [1] | HUANG Xianguo, ZHU Qibing, HUANG Min. Online Detection System for Freshness of Fruits and Vegetables Based on Temporal Multi-source Information Fusion [J]. Smart Agriculture, 2026, 8(1): 203-212. |
| [2] | HU Yumeng, GUAN Feifan, XIE Dongchen, MA Ping, YU Youben, ZHOU Jie, NIE Yanming, HUANG Lüwen. Tea Leaf Disease Diagnosis Based on Improved Lightweight U-Net3+ [J]. Smart Agriculture, 2026, 8(1): 15-27. |
| [3] | CAI Yuqin, LIU Daming, XU Qin, LI Boyang, LIU Bojie. Greenhouse Temperature and Humidity Prediction Method Based on Adaptive Kalman Filter and GWO-LSTM-Attention [J]. Smart Agriculture, 2026, 8(1): 148-155. |
| [4] | YAO Xiaotong, QU Shaoye. Lightweight Detection Method for Pepper Leaf Diseases and Pests Based on Improved YOLOv12s [J]. Smart Agriculture, 2026, 8(1): 1-14. |
| [5] | ZHAO Jun, NIE Zhigang, LI Guang, LIU Jiayu. Corn Borer Pests Infestations Detection Method Using Low-Altitude Close-Range UAV Imagery [J]. Smart Agriculture, 2025, 7(6): 111-123. |
| [6] | GAO Chenhong, ZHU Qibing, HUANG Min. Embedded Fluorescence Imaging Detection System for Fruit and Vegetable Quality Deterioration Based on Improved YOLOv8 [J]. Smart Agriculture, 2025, 7(5): 146-155. |
| [7] | LIU Yiheng, LIU Libo. Beef Cattle Object Detection Method Under Occlusion Environment Based on Improved YOLOv12 [J]. Smart Agriculture, 2025, 7(5): 182-192. |
| [8] | WANG Yi, XUE Rong, HAN Wenting, SHAO Guomin, HOU Yanqiao, CUI Xitong. Estimation of Maize Aboveground Biomass Based on CNN-LSTM-SA [J]. Smart Agriculture, 2025, 7(4): 159-173. |
| [9] | PENG Qiujun, LI Weiran, LIU Yeqiang, LI Zhenbo. High-Precision Fish Pose Estimation Method Based on Improved HRNet [J]. Smart Agriculture, 2025, 7(3): 160-172. |
| [10] | LI Zusheng, TANG Jishen, KUANG Yingchun. A Lightweight Model for Detecting Small Targets of Litchi Pests Based on Improved YOLOv10n [J]. Smart Agriculture, 2025, 7(2): 146-159. |
| [11] | NIU Ziang, QIU Zhengjun. Extraction Method of Maize Plant Skeleton and Phenotypic Parameters Based on Improved YOLOv11-Pose [J]. Smart Agriculture, 2025, 7(2): 95-105. |
| [12] | WU Liuai, XU Xueke. Lightweight Tomato Leaf Disease and Pest Detection Method Based on Improved YOLOv10n [J]. Smart Agriculture, 2025, 7(1): 146-155. |
| [13] | QUAN Jialu, CHEN Wenbai, WANG Yiqun, CHENG Jiajing, LIU Yilong. Research on Agricultural Drought Prediction Based on GCN-BiGRU-STMHSA [J]. Smart Agriculture, 2025, 7(1): 156-164. |
| [14] | YANG Xinting, HU Huan, CHEN Xiao, LI Wenzheng, ZHOU Zijie, LI Wenyong. Lightweight Detection and Recognition Model for Small Target Pests on Sticky Traps in Multi-Source Scenarios [J]. Smart Agriculture, 2025, 7(1): 111-123. |
| [15] | QI Zijun, NIU Dangdang, WU Huarui, ZHANG Lilin, WANG Lunfeng, ZHANG Hongming. Chinese Kiwifruit Text Named Entity Recognition Method Based on Dual-Dimensional Information and Pruning [J]. Smart Agriculture, 2025, 7(1): 44-56. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







