Smart Agriculture ›› 2025, Vol. 7 ›› Issue (6): 35-57.doi: 10.12133/j.smartag.SA202506008
• Special Issue--Remote Sensing + AI Empowering the Modernization of Agriculture and Rural Areas • Previous Articles Next Articles
WANG Xuechang1, XU Wenbo1, ZHENG Yongjun1,2( ), YANG Shenghui1,2(), LIU Xingxing1,2, SU Daobilige1,2, WANG Zimeng1,2
), YANG Shenghui1,2(), LIU Xingxing1,2, SU Daobilige1,2, WANG Zimeng1,2
Received:2025-06-03
Online:2025-11-30
Foundation items:National Key R&D Program of China(2023YFD2000203); National Natural Science Foundation of China(32372006); China Postdoctoral Science Foundation(2024T171010)
About author:WANG Xuechang, E-mail: wangxuechang@cau.edu.cn
corresponding author:
CLC Number:
WANG Xuechang, XU Wenbo, ZHENG Yongjun, YANG Shenghui, LIU Xingxing, SU Daobilige, WANG Zimeng. Current Status and Development Trend of Low-Altitude Economy Industry in Orchards[J]. Smart Agriculture, 2025, 7(6): 35-57.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202506008
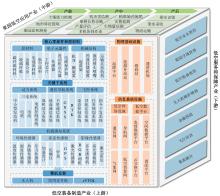
Fig. 1
The industry chain of orchard low-altitude economy


Fig. 2
Keywords density map of Chinese and English references on orchard low-altitude economy


Fig. 3
Service-object relationship in the downstream of the low-altitude industry chain

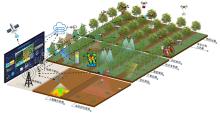
Fig. 4
Application of low-altitude technology in orchards

Table 1
Application of low altitude remote sensing technology in characterization extraction, biomass estimation, and yield assessment
| 遥感检测技术 | 提取特征参数 | 数据处理模型 | 作物 | 输出结果 | 参考文献 |
|---|---|---|---|---|---|
| RGB相机 | 叶面积指数 | 随机森林回归、逐步回归 | 猕猴桃树 | 产量估测 | [ |
| 冠幅、树高、植被指数 | 数字高程模型 | 蜜柚树 | 产量估测 | [ | |
| 植被指数 | 数字表面模型 | 砂糖橘树 | 果树分布提取 | [ | |
| 植被指数 | 多元回归模型 | 枣树 | 冠层叶绿素含量监测 | [ | |
| 冠层体积 | U-Net、大津阈值分割、随机抽样一致 | 梨树 | 冠层体积分割 | [ | |
| 树冠冠层 | 基于种子块标记的分水岭算法 | 苹果树 | 单木分割 | [ | |
| 高光谱遥感 | 冠层光谱数据 | 最小二乘回归、SVM、极限学习机、随机森林 | 苹果树 | 叶氮含量估算 | [ |
| 高光谱带 | Boruta迭代深度神经网络(Deep Neural Network, DNN) | 苹果树 | 叶氮含量估算 | [ | |
| 多光谱遥感 | 植被指数 | XGBoost、随机森林、SVM | 柑橘树 | 果实分类与产量、品质估测 | [ |
| 表型特征与植被指数 | 随机森林、BP神经网络、支持向量回归 | 苹果树 | 产量估测 | [ | |
| 植被指数 | CNN、长短期记忆网络、集成学习 | 葡萄藤 | 产量估测 | [ | |
| 植被指数 | 人工神经网络 | 葡萄藤 | 产量估测 | [ | |
| 果树树冠 | YOLO深度学习 | 苹果树 | 树冠监测、喷雾处方图生成 | [ | |
| 冠层体积、冠层高度、归一化植被指数 | 线性回归模型 | 栗子树 | 修剪木材生物量 | [ | |
| LiDAR | 果树几何参数 | Alpha-shape算法、主成分分析算法 | 苹果树 | 树顶识别、树高和冠基高度测定 | [ |
| LiDAR +多光谱 | 树冠体积、植被指数、树冠投影面积 | 集成机器学习 | 苹果树 | 产量估测 | [ |
| 植被指数 | 主成分分析、线性回归 | 甘蔗 | 预测生物量与叶片氮含量 | [ |
Table 2
Precision fertiliser and medicine application technology for orchards with low altitude equipment
| 技术方法 | 研究内容 | 作物 | 参考文献 |
|---|---|---|---|
| 喷施装置与精准对靶技术 | 喷雾量对液滴数量和喷雾覆盖率有显著影响 | 柑橘树 | [ |
| 无人机空中喷洒比拖拉机喷洒的效果好,对土壤群落的影响较小 | 橄榄树 | [ | |
| 综合资源消耗由小到大为单旋翼植保无人机、六旋翼植保无人机、风送喷雾机 | 苹果树 | [ | |
| 无人机喷雾器比陆地果园喷雾器显著减少了空气飘移和环境污染 | 橄榄树 | [ | |
| 结合先进的自动检测、风送、变量、对靶控制技术开展研究,减少污染 | 柑橘树 | [ | |
| 无人机比传统设备的喷洒成本每公顷低7欧元 | 橄榄/柑橘树 | [ | |
| 开发精准对靶喷洒地面站软件,实现设定喷洒参数等功能,进行基于处方图的喷洒 | 农田 | [ | |
| 基于无人机多光谱遥感技术在西班牙开展了葡萄园冠层活力图构建研究 | 葡萄藤 | [ | |
| 在巴西不同龄期柑橘园中,评估了无人机施药对柑橘木虱的防控效果 | 柑橘树 | [ | |
| 提出一种结合无线传感网络的无人机农药喷洒自适应系统,可根据实时气象变化动态调整飞行路径修正参数 | / | [ | |
| 无人机超低量施药在栗树病虫害防控中的药效可与气流式喷雾机相当,且喷雾覆盖率受施药量、飞行方式、机型尺寸、流量及树龄等因素影响显著 | 板栗树 | [ | |
| 研发并评估了一种基于多旋翼无人机的农药喷洒系统在棉花、水稻和绿豆作物上的防治效果 | / | [ | |
| 阐述了无人机施肥技术的应用现状,阐明了无人机施肥的巨大潜力,可以提高施肥的精准性和效率 | / | [ | |
| 提出一种基于施肥处方图的颗粒肥无人机变量控制系统,通过飞控与撒肥模块协同,实现对槽轮排肥器的精准控制,显著提升施肥精度与效率 | / | [ | |
| 设计多旋翼无人机撒肥系统,并利用EDEM仿真优化离心盘结构与作业参数,试验表明撒肥均匀性良好 | / | [ | |
| 构建适用于水稻叶面施肥的控制系统 | 水稻 | [ | |
| 基于高光谱数据获取处方图,利用“云鸮-100”无人机开展水稻精准追肥作业 | 水稻 | [ | |
| 提出应将AI技术有效引入无人机精准施药系统中,提高系统的自适应性和鲁棒性 | / | [ | |
| 飞行参数对沉积与飘移的调控 | 研究飞行高度、飞行速度和喷洒系统喷头安装位置参数对雾滴在苹果树上分布的影响 | 苹果树 | [ |
| 雾滴粒径是影响香蕉冠层叶片雾滴沉积密度、覆盖率、均匀度及穿透性的主要因素 | 香蕉树 | [ | |
| 无人机操作员调整飞行高度和速度,最大程度地减少在附近敏感区域的田外沉积 | 玉米 | [ | |
| 极目EA-30X四旋翼植保无人机在试验园的最优作业参数为:飞行速度2.5 m/s、飞行高度2.5 m、喷液量4.0 L/hm2 | 柑橘树 | [ | |
| 提出一种基于仿真果园试验台的植保无人机果园施药雾滴飘移测试方法,设计并制作仿真葡萄园试验台和空中飘移收集装置 | / | [ | |
| 无人机在不同施药量与喷嘴配置条件下,对木瓜植株上层、中层、下层及果簇四个部位实施喷施作业时的液滴利用率进行评估 | 木瓜 | [ | |
| 在飞行高度1.5 m、亩喷液量4.0 L/hm2、飞行速度3.0 m/s的飞行参数下,雾滴沉积密度和均匀性最优 | 库尔勒香梨树 | [ | |
| 在标准棚架果园设计并开展了四因素(喷雾施用量、飞行速度、飞行高度和飞行方向)和三水平的无人机喷洒试验正交试验 | 梨树 | [ | |
| 随着侧向风速的增加,离散雾滴粒子飘移程度越严重,雾滴水平飘移越明显 | / | [ | |
| 建立植保无人机雾滴飘移测试试验台,总结植保无人机喷雾施药作业中旋翼转速和喷雾压力的自身性能参数对雾滴飘移的影响规律 | / | [ | |
| 提出一种有效的喷幅确定方法,测定配备弥雾喷头的无人机的有效喷洒范围 | 南果梨树 | [ | |
| 评估电动六旋翼无人机喷雾器在果园作业模式(不同施药量和飞行模式)的喷雾性能 | 苹果树 | [ | |
| 量化在田间条件下使用商用无人航空喷洒系统在果园喷洒植物保护产品后的环境、居民和旁观者的暴露情况 | / | [ | |
| 果园喷洒模式可以达到更好的覆盖率,而雾滴密度则相反,喷雾效果与喷雾量、有无助剂、喷雾模式、喷雾高度等密切相关 | 苹果树 | [ | |
| 针对果园场景无人机多目标任务的航点规划问题,提出一种植保路径规划算法 | 柑橘树 | [ | |
| 比较传统果园喷雾机和喷洒无人机在商业超高密度橄榄园中产生的飘移 | 橄榄树 | [ | |
| 研发植保无人机施药沉积飘移监测系统,实时获取作业参数,并发送至平台软件,利用沉积飘移预测模型实时监测药液沉积区域及飘移范围 | / | [ | |
| 低空多机协同 | 提出一种改进的遗传算法,为每台割草机分配并优化作业路径,提高作业能力 | 苹果树 | [ |
| 基于多变异分组遗传算法的多机协同静态任务分配的机群代价比实际作业代价降低29.48%~55% | / | [ | |
| 提出多传感器融合的环境感知与路径提取、完整路径规划、强通用性果园导航、大型果园多作业环节的多机协同与远程操作等未来发展方向 | / | [ | |
| 基于神经辐射场的地空协同果园实景重建,实现了对果园-果树复杂系统定量化、可视化感知和认知 | 桃/苹果/梨树 | [ | |
| 提出一种立体植保方案,利用无人机和地面喷雾器对果树冠层不同部位进行喷雾,以提高喷雾均匀度 | 苹果/芒果/柑橘树 | [ | |
| 设计一种由果园履带式喷雾机和六旋翼植保无人机组成的空地协同立体植保系统,共同承担芒果园植保作业 | 芒果树 | [ | |
| 提出一种无人机-地面车辆协同定点喷药系统,并研制了样机 | 井冈蜜柚树 | [ |
Fig. 5
Picking drone with a laser cutter and barbed darts

Fig. 6
Tevel's picking drone with a gripper arm


Fig. 7
Fruit stalk laser cutting end-effector
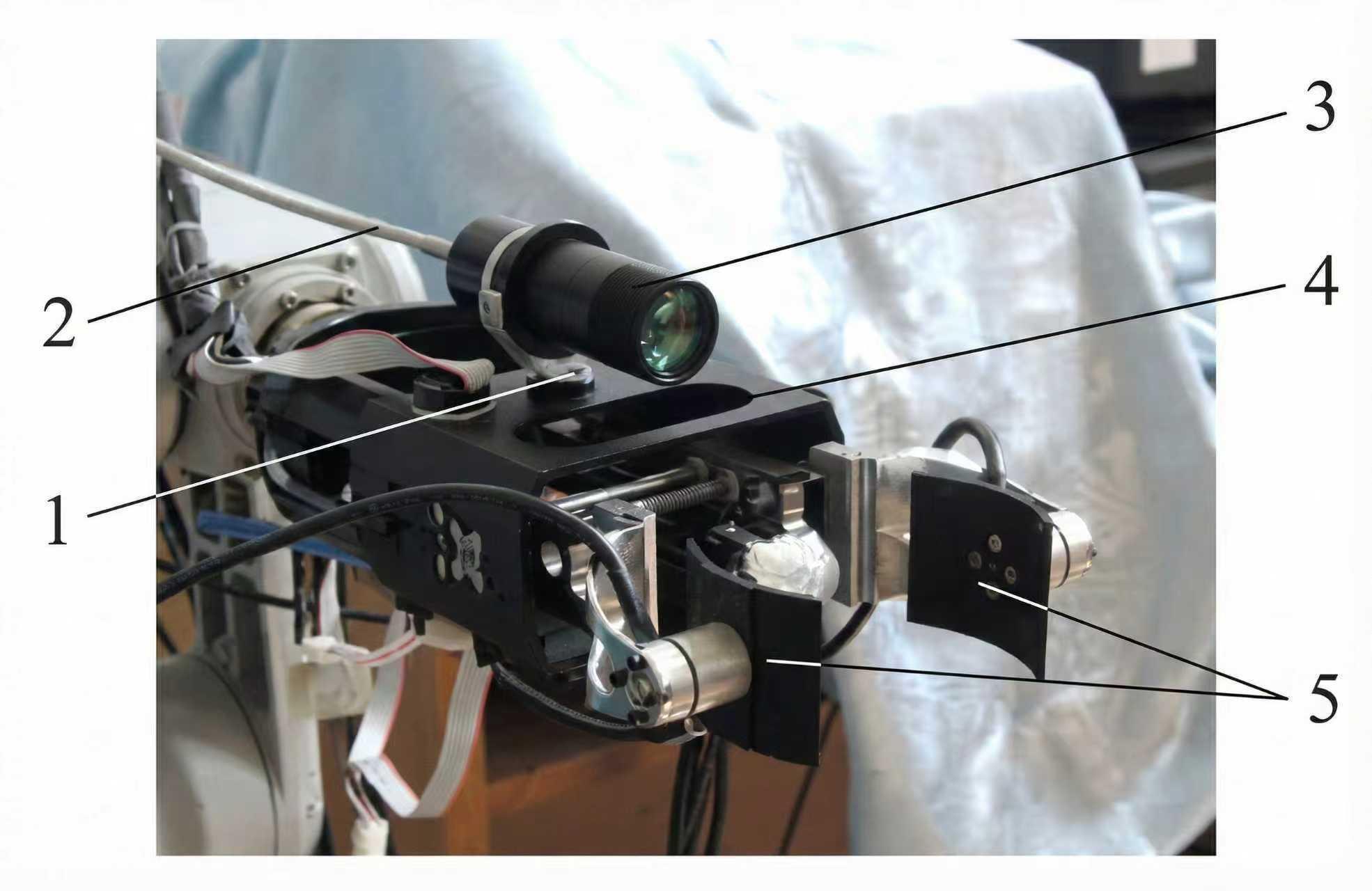
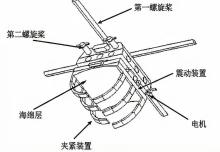
Fig. 8
Vibratory pine cone picking drone
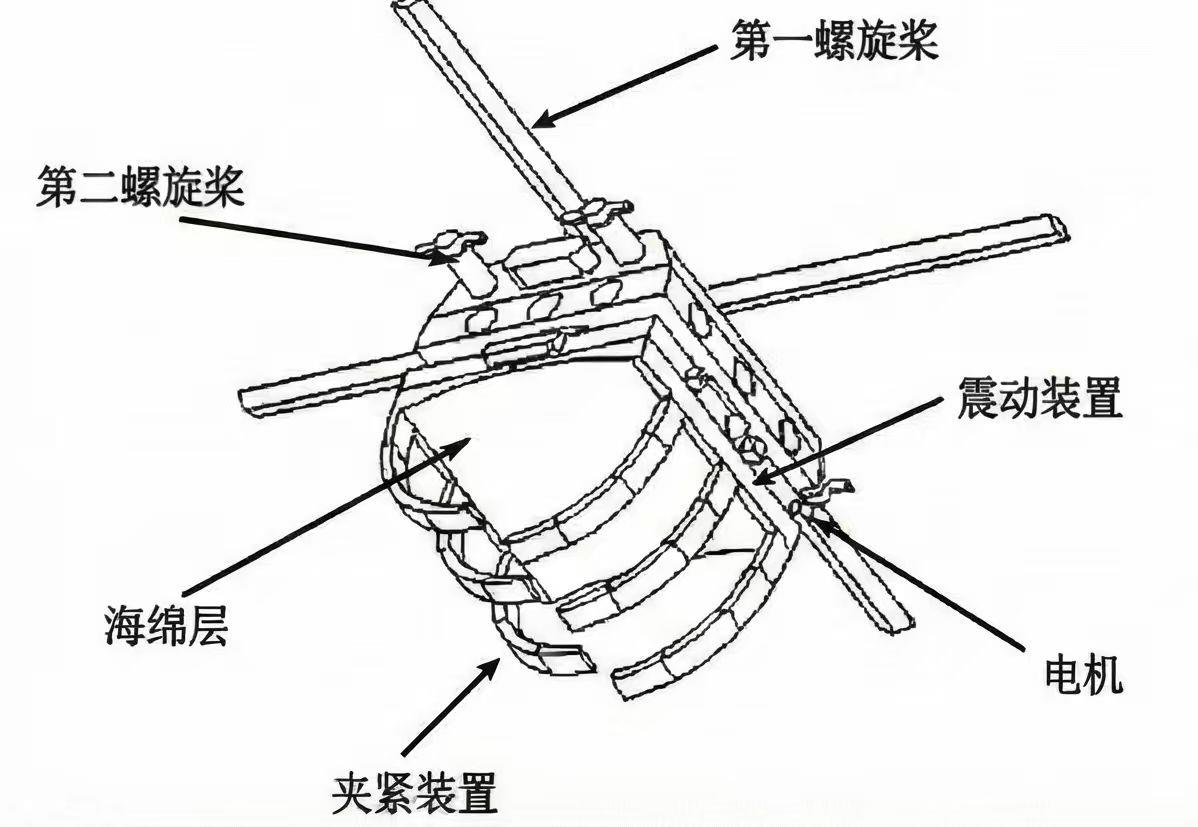
Table 3
Current status of low-altitude logistics and transportation
| 国家 | 公司名称 | 核心产品/技术 | 已实现功能与应用场景 | 进展情况 |
|---|---|---|---|---|
| 中国 | 顺丰速运 | 无人机物流配送系统 | 实现山区/偏远地区的中长距离配送,最大航程100 km,载重5~25 kg,支持高原飞行 | 获得国内首个无人机物流航线商业运营许可证 |
| 京东物流 | 自研物流无人机+智能配送站 | 覆盖乡村物流,支持高原、丘陵地区运营,搭配仓储和智能配送系统,实现无人接收与派送 | 已完成多省县级航线布局 | |
| 蜂巢航宇 | “蜂眼”系列物流无人机 | 搭载全景视觉与自动避障系统,适用于应急救援、岛屿补给、农产品投送等场景 | 飞行高度可达3 000 m | |
| 御风未来(eVTOL) | M1纯电动载人/载物飞行器 | 2吨级纯电eVTOL飞行器,适用于城市空运/短途物流,目前进入载人验证飞行阶段 | 2024年签订百架物流采购意向协议 | |
| 星逻智能 | 城市无人机配送系统 | 支持大楼楼顶起降、城市无人配送,打造低空“配送网格” | 与顺丰合作布局“城市空中配送网” | |
| 美国 | Zipline | Zip 2无人机物流系统 | 专注医疗物资、高价值品的长航程无人机配送,在非洲、美国、亚洲多国广泛运营 | 运营超10万次飞行,医疗物流领先者 |
| Amazon Prime Air | Prime Air自动化物流无人机 | 支持城市快速投送服务,已在美国部分城市实现小包裹30分钟内无人机送达 | 获FAA许可,推进城市低空配送 | |
| UPS Flight Forward | Matternet M2合作无人机系统 | 医疗样本、医院间配送系统,与Matternet联合运营,已在美多州开展固定航线服务 | 获首个FAA“135标准”运营证照 | |
| 以色列 | Flytrex | Sky Delivery 无人机平台 | 以社区配送为主,可投放日常商品(餐饮、生鲜),已与沃尔玛等商业零售建立合作关系 | 投送范围3~5 km,约3 kg负载 |
| 法国 | Dronisos | 智能多机编队+物流无人机系统 | 除表演任务外开发物流模块,支持定点多点协同投送系统 | 开始城市物流试点 |
| 德国 | Volocopter | Volocity eVTOL飞行器 | 专注于城市空中出租车与低空物流,开发的eVTOL飞行器实现了多点之间的快速运输,支持城市空中交通(Urban Air Mobility,UAM)和医疗物资运输 | 在新加坡和德国开展了低空物流与空中出行的试飞与合作 |
| DDG | 多功能配送无人机系统 | 提供端到端无人机配送服务,特别关注货物、包裹等物流领域,已经开始在德国多个城市进行试点运输 | 已与多个物流公司合作,测试覆盖城市物流与应急物资配送 | |
| Rivada | 无人机集群物流配送系统 | 提供基于无人机的物流配送系统,专注于城市与乡村的快递配送,系统支持大规模无人机群组协作任务 | 提供包括自动化充电、数据回传和调度系统的全套解决方案 |
Table 4
Key technologies for low-altitude logistics and transportation
| 领域 | 技术 | 成果 | 文献 |
|---|---|---|---|
| 夹持机构设计 | 四连杆刚性夹持器 | 开发了一种新型四连杆刚性夹持器,并在室内完成抓取放置试验 | [ |
| 铰接式空中机器人 | 提出全自主拾取和放置方案,开发了具有主动可倾斜传感器的铰接机器人模型,实现自主的对象搜索、拾取和放置序列 | [ | |
| 空中快速拾取和运输机器人(Rapid Aerial Pickup and Transport of Objects by Robots,RAPTOR)平台 | 研发四旋翼无人机快速抓取系统,配备Fin Ray夹具,利用软性材料增强夹具与物体的摩擦力,可更灵活地抓取不同几何形状的物体 | [ | |
| 目标识别与环境感知 | LiDAR | 用于绘制周边环境地图,有效避免与障碍物发生碰撞,保障配送过程中的飞行安全 | [ |
| IMU | 提升飞行过程中的姿态稳定性,确保物流配送过程中的精准定位 | [ | |
| 摄像头、测距仪与目标识别算法 | 精确获取目标位置坐标,确保货物能够精准投送并准确着陆至指定地点 | [ | |
| 运动控制 | 比例-积分-微分(Proportional-Integral-Derivative Control,PID)控制 | 采用PID控制方法,实现快速响应环境变化,保证物流任务完成 | [ |
| 线性二次调节控制 | 使用线性二次调节控制方法实现高精度配送过程,优化飞行轨迹,提高姿态控制性能 | [ | |
| 反馈线性化控制 | 实现多机协同运输的稳定轨迹跟踪,保证多机协作下的物流任务稳定进行 | [ | |
| 航线规划 | 自适应路径优化模型 | 实现动态路径调整,可在飞行速度、作业时间等多重约束条件下进行航线优化 | [ |
| K-means聚类算法与数学优化模型 | 优化配送中心选址,并改进配送路径规划策略,提高路径效率 | [ | |
| 分布式鲁棒优化 | 用于应对配送过程中存在的不确定性因素,协同优化无人机物流配送系统中的设施选址与路径规划问题 | [ | |
| 运输安全 | 折纸结构原理设计防护装置 | 基于形状记忆合金材料设计的无人机防护装置,提供全方位物理防护,增强无人机在运输中的安全性 | [ |
| 避障技术 | 依赖于传感器与算法协同工作,在短时间内完成障碍物检测与规避操作 | [ | |
| 动力能源 | 续航评估模型与电池优化 | 建立适用于不同类型无人机的续航评估模型,并优化电池配置与运行负荷参数,提高整机运行效率与续航能力 | [ |
| [1] |
何勇, 王月影, 何立文, 等. 低空经济政策和技术在农业农村的应用现状与前景[J]. 农业工程学报, 2025, 41(8): 1-16.
|
|
|
|
| [2] |
饶晓燕, 吴建伟, 李春朋, 等. 智慧苹果园"空-天-地"一体化监控系统设计与研究[J]. 中国农业科技导报, 2021, 23(6): 59-66.
|
|
|
|
| [3] |
张津国, 蔡建峰, 姜蓉蓉, 等. 果园作业机器人自主导航多任务联合感知方法研究[J]. 智能化农业装备学报(中英文), 2025(2): 35-43.
|
|
|
|
| [4] |
贾宜霖. 多旋翼无人机果园植保作业规划及服务系统研发[D]. 泰安: 山东农业大学, 2022.
|
|
|
|
| [5] |
徐旻, 张瑞瑞, 陈立平, 等. 智能化无人机植保作业关键技术及研究进展[J]. 智慧农业, 2019, 1(2): 20-33.
|
|
|
|
| [6] |
吴建伟, 王秀琴, 张文平, 等. 果园植保无人机精准变量作业控制方法研究[J]. 中国植保导刊, 2024, 44(7): 11-16.
|
|
|
|
| [7] |
|
| [8] |
何雄奎. 中国精准施药技术和装备研究现状及发展建议[J]. 智慧农业(中英文), 2020, 2(1): 133-146.
|
|
|
|
| [9] |
韩冷, 何雄奎, 王昌陵, 等. 智慧果园构建关键技术装备及展望[J]. 智慧农业(中英文), 2022, 4(3): 1-11.
|
|
|
|
| [10] |
毛华彬. 武鸣沃柑果园管理无人机云平台建设研究[J]. 农业技术与装备, 2024(6): 19-21.
|
|
|
|
| [11] |
赫氏复材是先进复合材料及技术的全球领导者[EB/OL]. 赫氏官网, [2025-07-15].
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
孔祥浩, 张卓然, 陆嘉伟, 等. 分布式电推进飞机电力系统研究综述[J]. 航空学报, 2018, 39(1): 51-67.
|
|
|
|
| [16] |
宁德时代新能源科技股份有限公司,宁德时代润智软件科技有限公司. 固态电池单体、电池装置以及固态电池的制造方法: 202411638587.9[P]. 2024-12-20.
|
| [17] |
薛海波, 程晓燕, 徐洋. 我国固态电池产业化发展的问题与进路[J]. 西南石油大学学报(社会科学版), 2024, 26(2):1-7.
|
|
|
|
| [18] |
陈亚平. 日本全固态电池最新进展[EB/OL]. NE时代新能源,(2024-06-24)[2025-07-15].
|
| [19] |
郑永航, 赵波, 赵珊. 无人机动力系统优化与能效提升研究[J]. 模具制造, 2024, 24(7): 162-164.
|
|
|
|
| [20] |
刘莹奇, 陆红强, 舒营恩, 等. 一种机载多光谱共口径瞄准吊舱光学系统设计[J/OL]. 中国光学 (中英文), (2025-04-21)[2025-05-21]. doi: 10.37188/CO.2025-0011 .
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
仲恺农业工程学院. 一种四旋翼无人机的双IMU防抖飞控系统: 201820214554.5[P]. 2018-08-17.
|
| [25] |
|
| [26] |
宋奇, 高小红, 尹成卓, 等. 基于无人机、卫星影像的湟水流域田间土壤质地估算[J]. 地球信息科学学报, 2025, 27(4): 946-966.
|
|
|
|
| [27] |
杨三萍. 无人机遥感技术在农业灾害调查中的应用探究[J]. 农业灾害研究, 2024, 14(6): 323-325.
|
|
|
|
| [28] |
毕海峰, 李杰. 基于遥感技术的农作物水灾灾情评估方法研究[J]. 地矿测绘, 2019, 35(2): 20-23.
|
|
|
|
| [29] |
|
| [30] |
沈阳大学.一种基于鸿蒙操作系统的智慧农业气象站控制器系统: 202322074099.7[P].2024-05-03.
|
| [31] |
|
| [32] |
|
| [33] |
农更行. 累计融资超3000万美元,获拜耳、富美实支持,Guardian打造美国领先的植保无人机运营公司[EB/OL]. (2023-06-29)[2025-04-27].
|
| [34] |
|
| [35] |
张佳, 辛斌, 曹盟, 等. 基于AirSim的无人机硬件在环仿真平台设计与实现[J]. 实验室研究与探索, 2024, 43(8): 41-46.
|
|
|
|
| [36] |
彩虹无人机科技有限公司. 一种无人机用动力系统推力扭矩实时监控方法及系统: 201810695525.X[P]. 2020-10-23.
|
| [37] |
中国直升机设计研究所, 江西神州六合直升机有限责任公司. 用于直升机桨叶超声检测的阵列式柔性探头及使用方法: 202311486480.2[P]. 2023-12-29.
|
| [38] |
上海艾拉比智能科技有限公司. 一种基于OTA技术的无人机自动化测试方法及系统: 202411569768.0[P]. 2024-12-03.
|
| [39] |
|
| [40] |
中国人民解放军军事科学院国防科技创新研究院. 一种基于4G网络的无人机集群载荷远程调试方法和系统: 202310968588.9[P]. 2023-11-14.
|
| [41] |
深圳高度创新技术有限公司. 无人机全自动换电机场: 202210041971.5[P]. 2025-04-22.
|
| [42] |
蓝誉鑫, 刘奕麟, 尹胜立, 等. 无人机电池充电管理系统的优化与应用[J]. 集成电路应用, 2023, 40(4): 380-381.
|
|
|
|
| [43] |
慧飞无人机应用技术培训中心. DJI果树应用课程[EB/OL]. [2025-05-29].
|
| [44] |
银波. 供给侧改革视域下无人机操控员培养[J]. 南方农机, 2018, 49(8): 113, 169.
|
| [45] |
Aviation Australia[EB/OL]. [2025-07-15].
|
| [46] |
无人机培训、新闻和免费资源[EB/OL]. 美国UAV Coach. [2025-07-15].
|
| [47] |
CommercialAllianz. Structure & history of Allianz Commercial[EB/OL]. [2025-05-28].
|
| [48] |
U-ELCOME : precision farming flight trials integrated with U-space[N/OL]. Topview. (2024-07-24)[2025-04-27].
|
| [49] |
夏若彤. 果旅融合背景下果园设计及空间布局规划分析: 《川果产业振兴工作推进方案》启示[J]. 中国果树, 2024(1): 152-153.
|
|
|
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
彭涛, 赵丽, 张爱军, 等. 土壤全氮的无人机高光谱响应特征及估测模型构建[J]. 农业工程学报, 2023, 39(4): 92-101.
|
|
|
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
金磊, 李云, 杜军, 等. 无人机测绘在皖南烟区面积测量及烟株数量核定中的应用[J]. 现代农业科技, 2023(12): 134-137.
|
|
|
|
| [63] |
李伟, 李洪明, 麻莉娜, 等. 基于无人机和改进Mask RCNN的山地烟田面积快速测量技术[J]. 云南农业科技, 2024(4): 32-36.
|
|
|
|
| [64] |
齐涛, 丁明婧, 梁玉才. 单镜头无人机贴近摄影测量技术在梯田面积调查中的应用[J]. 西部资源, 2025(1): 74-77.
|
|
|
|
| [65] |
杜蒙蒙, 李瀚远, 金鑫, 等. 基于无人机遥感图像提取农田微地形特征[J]. 农业工程, 2023, 13(2): 77-81.
|
|
|
|
| [66] |
于丰华, 许童羽, 郭忠辉, 等. 水稻智慧无人农场关键技术研究现状与展望[J]. 智慧农业(中英文), 2024, 6(6): 1-22.
|
|
|
|
| [67] |
|
| [68] |
|
| [69] |
潘时佳, 吴津乐, 程梅, 等. 基于改进CNN的猕猴桃根区土壤含水率反演方法[J]. 农业工程学报, 2024, 40(11): 85-91.
|
|
|
|
| [70] |
赵文举, 马芳芳, 马宏, 等. 基于无人机多光谱影像的土壤盐分反演模型[J]. 农业工程学报, 2022, 38(24): 93-101.
|
|
|
|
| [71] |
|
| [72] |
|
| [73] |
魏萱, 蒋一凡, 蔡玥乐, 等. 农业无人机高光谱成像遥感研究现状和进展[J]. 中国农业信息, 2024, 36(4): 27-46.
|
|
|
|
| [74] |
杨国峰, 何勇, 冯旭萍, 等. 无人机遥感监测作物病虫害胁迫方法与最新研究进展[J]. 智慧农业(中英文), 2022, 4(1): 1-16.
|
|
|
|
| [75] |
|
| [76] |
刘雨杭. 无人机遥感技术在农业病虫害监测中的应用探讨[J]. 河北农机, 2025(4): 21-23.
|
|
|
|
| [77] |
|
| [78] |
|
| [79] |
闫云才, 郝硕亨, 高亚玲, 等. 基于空地多源信息的猕猴桃果园病虫害检测方法[J]. 农业机械学报, 2023, 54(S2): 294-300.
|
|
|
|
| [80] |
荆怀龙, 杨箫, 于晓鹏, 等. 基于无人机的丘陵果园病虫害监测系统研究[J]. 南方农机, 2022, 53(10): 73-75.
|
|
|
|
| [81] |
高德民, 史东旭, 薛卫, 等. 基于物联网与低空遥感的农业病虫害监测技术研究[J]. 东北农业科学, 2021, 46(1): 108-113.
|
|
|
|
| [82] |
朱敏. 基于多模态数据的农业大数据可视化平台建设[J]. 数字技术与应用, 2024, 42(12): 217-219.
|
|
|
|
| [83] |
冯健, 马俊燕, 邓齐林, 等. 基于无人机影像技术的柑橘园产量估算方法[J]. 农机化研究, 2024, 46(4): 36-41.
|
|
|
|
| [84] |
|
| [85] |
|
| [86] |
罗翔, 曹晓林, 药林桃, 等. 基于无人机影像的井冈蜜柚果树树形信息提取及产量估测[J]. 中国农机化学报, 2024, 45(5): 161-167.
|
|
|
|
| [87] |
祁媛, 徐伟诚, 王林琳, 等. 基于无人机遥感影像的沙糖橘果树提取方法研究[J]. 华南农业大学学报, 2020, 41(6): 126-133.
|
|
|
|
| [88] |
王永东, 尼格拉·吐尔逊, 郑江华, 等. 基于无人机可见光影像的坐果期枣树冠层SPAD值估算[J]. 江苏农业科学, 2024, 52(6): 206-215.
|
|
|
|
| [89] |
|
| [90] |
徐伟萌. 基于多平台遥感数据的复杂果园分类及密植果树单木分割研究[D]. 西安: 长安大学, 2022.
|
|
|
|
| [91] |
徐伟萌, 杨浩, 李振洪, 等. 利用无人机数码影像进行密植型果园单木分割[J]. 武汉大学学报(信息科学版), 2022, 47(11): 1906-1916.
|
|
|
|
| [92] |
|
| [93] |
|
| [94] |
吴立峰, 徐文浩, 裴青宝. 基于无人机影像与机器学习的柑橘产量估测研究[J]. 农业机械学报, 2024, 55(12): 294-305.
|
|
|
|
| [95] |
张振飞, 颜安, 郭靖, 等. 基于无人机遥感的苹果产量估测模型研究[J/OL]. 中国农业科技导报, (2025-04-01)[2025-05-21].
|
|
|
|
| [96] |
奥斯曼·艾力尼亚孜. 基于无人机遥感的葡萄叶面积指数提取与产量估算方法研究[D]. 武汉: 武汉大学, 2022.
|
|
|
|
| [97] |
|
| [98] |
|
| [99] |
|
| [100] |
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
|
| [105] |
陈炳太, 郑永军, 江世界, 等. 果园施药机械资源消耗水平评价模型研究[J]. 农业机械学报, 2020, 51(S2): 289-297.
|
|
|
|
| [106] |
|
| [107] |
梁植源, 范健文, 林贤坤, 等. 柑橘园施药关键技术及机械研究进展[J]. 农业技术与装备, 2021(10): 48-52.
|
|
|
|
| [108] |
|
| [109] |
张子超, 张亚莉, 兰玉彬, 等. 精准对靶喷洒植保无人机地面站的设计[J]. 农机化研究, 2025, 47(7): 112-120.
|
|
|
|
| [110] |
|
| [111] |
|
| [112] |
|
| [113] |
|
| [114] |
|
| [115] |
印珍. 无人机在农业机械精准施肥中的应用研究[J]. 南方农机, 2024, 55(4): 174-176.
|
|
|
|
| [116] |
|
| [117] |
任万军, 吴振元, 李蒙良, 等. 水稻无人机撒肥系统设计与试验[J]. 农业机械学报, 2021, 52(3): 88-98.
|
|
|
|
| [118] |
曲云霞, 梁春英, 于天齐, 等. 四旋翼无人机喷施肥控制系统的试验台分析[J]. 农机化研究, 2023, 45(3): 222-225, 236.
|
|
|
|
| [119] |
于丰华, 曹英丽, 许童羽, 等. 基于高光谱遥感处方图的寒地分蘖期水稻无人机精准施肥[J]. 农业工程学报, 2020, 36(15): 103-110.
|
|
|
|
| [120] |
邓巍, 陈立平, 张瑞瑞, 等. 无人机精准施药关键技术综述[J]. 农业工程, 2020, 10(4): 1-10.
|
|
|
|
| [121] |
刘琪, 兰玉彬, 单常峰, 等. 航空植保喷施参数对苹果树雾滴沉积特性影响[J]. 农机化研究, 2020, 42(9): 173-180.
|
|
|
|
| [122] |
|
| [123] |
|
| [124] |
陈功, 廖凯, 肖畑, 等. 植保无人机作业参数对雾滴在柑橘树冠层沉积分布的影响[J]. 中国植保导刊, 2025, 45(2): 74-78.
|
|
|
|
| [125] |
王昌陵, 何雄奎, 曾爱军, 等. 基于仿真果园试验台的植保无人机施药雾滴飘移测试方法与试验[J]. 农业工程学报, 2020, 36(13): 56-66.
|
|
|
|
| [126] |
|
| [127] |
|
| [128] |
陈盛德, 展义龙, 兰玉彬, 等. 侧向风对航空植保无人机平面扇形喷头雾滴飘移的影响[J]. 华南农业大学学报, 2021, 42(4): 89-98.
|
|
|
|
| [129] |
杨晨升, 陈佳坪, 谢泽铭, 等. 植保无人机雾滴飘移测试试验台设计及飘移性能分析[J]. 农机化研究, 2024, 46(5): 175-181, 196.
|
|
|
|
| [130] |
|
| [131] |
|
| [132] |
|
| [133] |
|
| [134] |
|
| [135] |
|
| [136] |
张瑞瑞, 李龙龙, 陈立平, 等. 植保无人机施药沉积飘移监测系统设计与应用[J]. 植物保护学报, 2021, 48(3): 537-545.
|
|
|
|
| [137] |
谢金燕, 刘丽星, 杨欣, 等. 苹果园内无人割草机多机协同作业路径优化算法[J]. 华南农业大学学报, 2024, 45(4): 578-587.
|
|
|
|
| [138] |
王猛, 赵博, 刘阳春, 等. 基于多变异分组遗传算法的多机协同作业静态任务分配[J]. 农业机械学报, 2021, 52(7): 19-28.
|
|
|
|
| [139] |
马楠, 曹姗姗, 白涛, 等. 农业复杂场景下多机器人协同SLAM研究进展与展望[J]. 智慧农业(中英文), 2024(6): 23-43.
|
|
|
|
| [140] |
刘镔霄.基于神经辐射场的地空协同果园实景重建[D]. 淄博: 山东理工大学, 2024.
|
|
|
|
| [141] |
|
| [142] |
|
| [143] |
YULICHEN, ZIBOLIU, ZHENLN, et al. UAV-UGV cooperative targeted spraying system for honey pomelo orchard[J]. International journal of agricultural and biological engineering, 2024, 17(6): 22-31.
|
| [144] |
谢嘉, 吴家桢, 李永国, 等. 采摘无人机研究综述[J]. 制造业自动化, 2022, 44(10): 72-75.
|
|
|
|
| [145] |
海建平. 双无人机协作椰子采摘机器人: 201810626021.2[P]. 2018-11-30.
|
| [146] |
刘继展, 徐秀琼, 李萍萍. 果实采摘中果梗激光切割分析与实验[J]. 农业机械学报, 2014, 45(1): 59-64.
|
|
|
|
| [147] |
同济大学. 一种震动式松果采摘机: 201910093280.8[P]. 2021-11-09.
|
| [148] |
王得志, 王延鑫, 汪小旵, 等. 农业机器人中的管理与采摘技术: 现状、挑战与未来发展[J]. 智能化农业装备学报(中英文), 2025(2): 1-23.
|
|
|
|
| [149] |
|
| [150] |
|
| [151] |
吕浚浩, 钟小华, 鹏雨明. 基于YOLOv5的水果采摘无人机设计[J]. 南方农机, 2025, 56(1): 39-42.
|
|
|
|
| [152] |
|
| [153] |
赵嘉辉, 张耀中, 夏志鹏, 等. 山核桃采收一体无人机设计构想与矛盾分析[J]. 南方农机, 2022, 53(15): 40-44.
|
|
|
|
| [154] |
|
| [155] |
|
| [156] |
|
| [157] |
|
| [158] |
|
| [159] |
汤琴琴, 王立喜, 侍经纬, 等. 复杂环境下无人机视觉惯性里程计设计[J]. 中国惯性技术学报, 2025, 33(2): 140-146.
|
|
|
|
| [160] |
马宁, 曹云峰. 面向无人机自主着陆的视觉感知与位姿估计方法综述[J]. 自动化学报, 2024, 50(7): 1284-1304.
|
|
|
|
| [161] |
|
| [162] |
|
| [163] |
|
| [164] |
谢华, 韩斯特, 尹嘉男, 等. 城市低空无人机飞行计划协同推演与优化调配方法[J]. 航空学报, 2024, 45(19): ID 330018.
|
|
|
|
| [165] |
任新惠, 王佳雪, 王梦琦. 考虑动态能耗的无人机配送选址路径规划研究[J]. 计算机工程与应用, 2023, 59(13): 273-280.
|
|
|
|
| [166] |
|
| [167] |
|
| [168] |
|
| [169] |
|
| [1] | SONG Mingxuan, BAI Bo, YANG Juntao, ZHANG Yutao, LI Sa, LI Zhenhai, WAN Shubo, LI Guowei. Robust UAV-Based Method for Peanut Plant Height Estimation Using Bare-Soil Invariant Constraints [J]. Smart Agriculture, 2025, 7(6): 124-135. |
| [2] | CAO Yuying, LIU Yinchuan, GAO Xinyue, JIA Yinjiang, DONG Shoutian. LightTassel-YOLO: A Real-Time Detection Method for Maize Tassels Based on UAV Remote Sensing [J]. Smart Agriculture, 2025, 7(6): 96-110. |
| [3] | HE Yong, DAI Fushuang, ZHU Jiangpeng, HE Liwen, WANG Yueying. Current Status and Trends of Application Scenarios and Industrial Development in the Agricultural Low-Altitude Economy [J]. Smart Agriculture, 2025, 7(6): 1-17. |
| [4] | LAN Yubin, WANG Chaofeng, SUN Heguang, CHEN Shengde, WANG Guobin, DENG Xiaoling, WANG Yuanjie. Low-Altitude Technology Empowering Smart Agriculture: Technical System, Application Scenarios, and Challenge Recommendations [J]. Smart Agriculture, 2025, 7(6): 18-34. |
| [5] | PENG Xiaodan, CHEN Fengjun, ZHU Xueyan, CAI Jiawei, GU Mengmeng. Dense Nursery Stock Detecting and Counting Based on UAV Aerial Images and Improved LSC-CNN [J]. Smart Agriculture, 2024, 6(5): 88-97. |
| [6] | LONG Jianing, ZHANG Zhao, LIU Xiaohang, LI Yunxia, RUI Zhaoyu, YU Jiangfan, ZHANG Man, FLORES Paulo, HAN Zhexiong, HU Can, WANG Xufeng. Wheat Lodging Types Detection Based on UAV Image Using Improved EfficientNetV2 [J]. Smart Agriculture, 2023, 5(3): 62-74. |
| [7] | ZHANG Gan, YAN Haifeng, HU Gensheng, ZHANG Dongyan, CHENG Tao, PAN Zhenggao, XU Haifeng, SHEN Shuhao, ZHU Keyu. Identification Method of Wheat Field Lodging Area Based on Deep Learning Semantic Segmentation and Transfer Learning [J]. Smart Agriculture, 2023, 5(3): 75-85. |
| [8] | LIU Yixue, SONG Yuyang, CUI Ping, FANG Yulin, SU Baofeng. Diagnosis of Grapevine Leafroll Disease Severity Infection via UAV Remote Sensing and Deep Learning [J]. Smart Agriculture, 2023, 5(3): 49-61. |
| [9] | LIU Yongbo, GAO Wenbo, HE Peng, TANG Jiangyun, HU Liang. Apple Phenological Period Identification in Natural Environment Based on Improved ResNet50 Model [J]. Smart Agriculture, 2023, 5(2): 13-22. |
| [10] | WEI Yongkang, YANG Tiancong, DING Xinyao, GAO Yuezhi, YUAN Xinru, HE Li, WANG Yonghua, DUAN Jianzhao, FENG Wei. Wheat Lodging Area Recognition Method Based on Different Resolution UAV Multispectral Remote Sensing Images [J]. Smart Agriculture, 2023, 5(2): 56-67. |
| [11] | XIA Xue, CHAI Xiujuan, ZHANG Ning, ZHOU Shuo, SUN Qixin, SUN Tan. A Lightweight Fruit Load Estimation Model for Edge Computing Equipment [J]. Smart Agriculture, 2023, 5(2): 1-12. |
| [12] | FU Hongyu, WANG Wei, LIAO Ao, YUE Yunkai, XU Mingzhi, WANG Ziwei, CHEN Jianfu, SHE Wei, CUI Guoxian. High Quality Ramie Resource Screening Based on UAV Remote Sensing Phenotype Monitoring [J]. Smart Agriculture, 2022, 4(4): 74-83. |
| [13] | ZHUO Yue, DING Feng, YAN Haijun, XU Jing. Advances in Forage Crop Growth Monitoring by UAV Remote Sensing [J]. Smart Agriculture, 2022, 4(4): 35-48. |
| [14] | FAN Chengzhi, WANG Ziwen, YANG Xingchao, LUO Yongkai, XU Xuexin, GUO Bin, LI Zhenhai. Machine Learning Inversion Model of Soil Salinity in the Yellow River Delta Based on Field Hyperspectral and UAV Multispectral Data [J]. Smart Agriculture, 2022, 4(4): 61-73. |
| [15] | ZHANG Zhibo, ZHAO Xining, GAO Xiaodong, ZHANG Li, YANG Menghao. Accurate Extraction of Apple Orchard on the Loess Plateau Based on Improved Linknet Network [J]. Smart Agriculture, 2022, 4(3): 95-107. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







