Smart Agriculture ›› 2022, Vol. 4 ›› Issue (3): 24-41.doi: 10.12133/j.smartag.SA202206010
• Special Issue--Key Technologies and Equipment for Smart Orchard • Previous Articles Next Articles
DUAN Luojia1,2,3,4( ), YANG Fuzeng1,2,3(), YAN Bin1,2,3, SHI shuaiqi1,2,3, QIN jifeng1,2,3
), YANG Fuzeng1,2,3(), YAN Bin1,2,3, SHI shuaiqi1,2,3, QIN jifeng1,2,3
Received:2022-06-21
Online:2022-09-30
Foundation items:Shaanxi Province Major Science and Technology Breakthrough Program (202d0zdzx03-04-01)
About author:DUAN Luojia, E-mail:duanluojia@126.com
corresponding author:
YANG Fuzeng, E-mail:yangfzkm@nwafu.edu.cn
CLC Number:
DUAN Luojia, YANG Fuzeng, YAN Bin, SHI shuaiqi, QIN jifeng. Research Progress of Apple Production Intelligent Chassis and Weeding and Harvesting Equipment Technology[J]. Smart Agriculture, 2022, 4(3): 24-41.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202206010

Fig. 1
Types of orchard power chassis

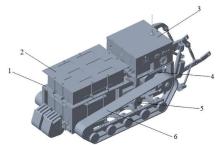
Fig. 2
Electric crawler power chassis
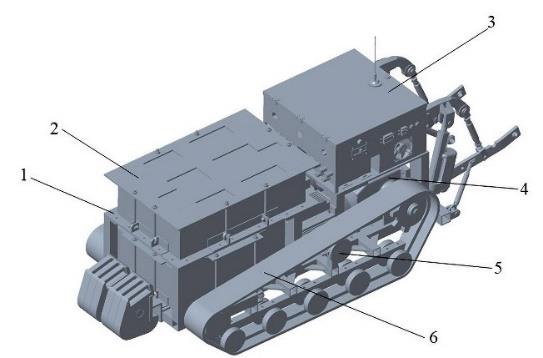
Table 1
Comparison of navigation technology performance of four types of apple orchard
| 导航技术 | 优点 | 缺点 |
|---|---|---|
| 卫星导航[ | 1.应用范围广 2.定位精度高 3.全天候工作 | 1.易受果园郁闭环境影响,导致信号丢失 2.由于自身工作原理,有很多误差 |
| 机器视觉导航[ | 1.速度快 2.信息量大 3.功能多 | 1.受光照和阴影的影响,鲁棒性需提高 2.受地形等环境影响,存在图像模糊等现象 |
| 激光雷达导航[ | 1.抗干扰能力强 2.扫描速度快 3.定位精准 | 1.成本相对较高 2.低于农机的障碍物或作物难以识别 |
| 多传感融合器导航[ | 1.定位精度最高 2.实时性好 3.系统鲁棒性强 | 1.数据融合处理相对复杂 2.基础融合理论与算法仍需完善 |

Fig.3
Different types of weeding machine

Fig. 4
Bionic weeding device
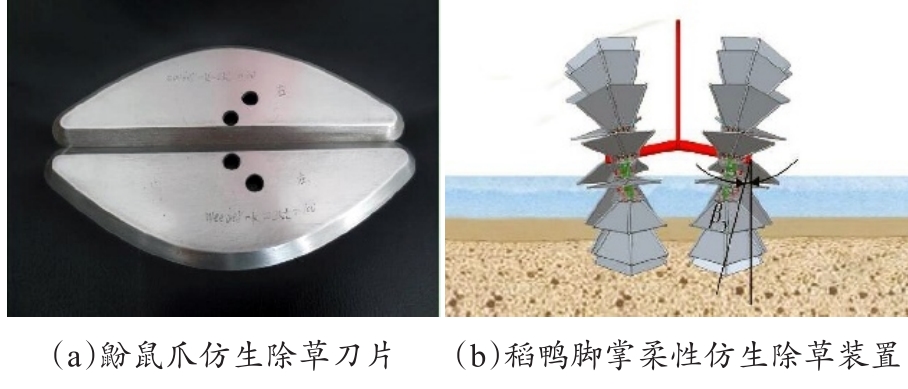
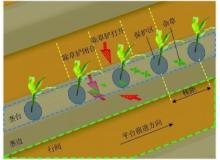
Fig. 5
Schematic of inter-row weeding
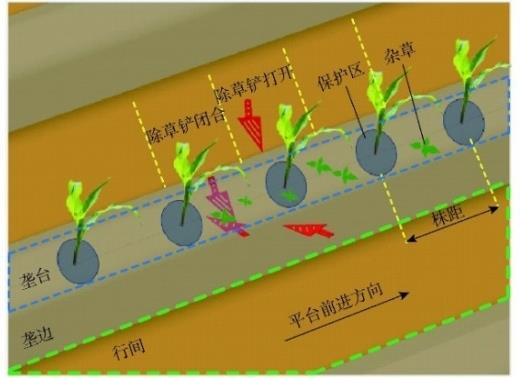

Fig.6
Types of apple harvest
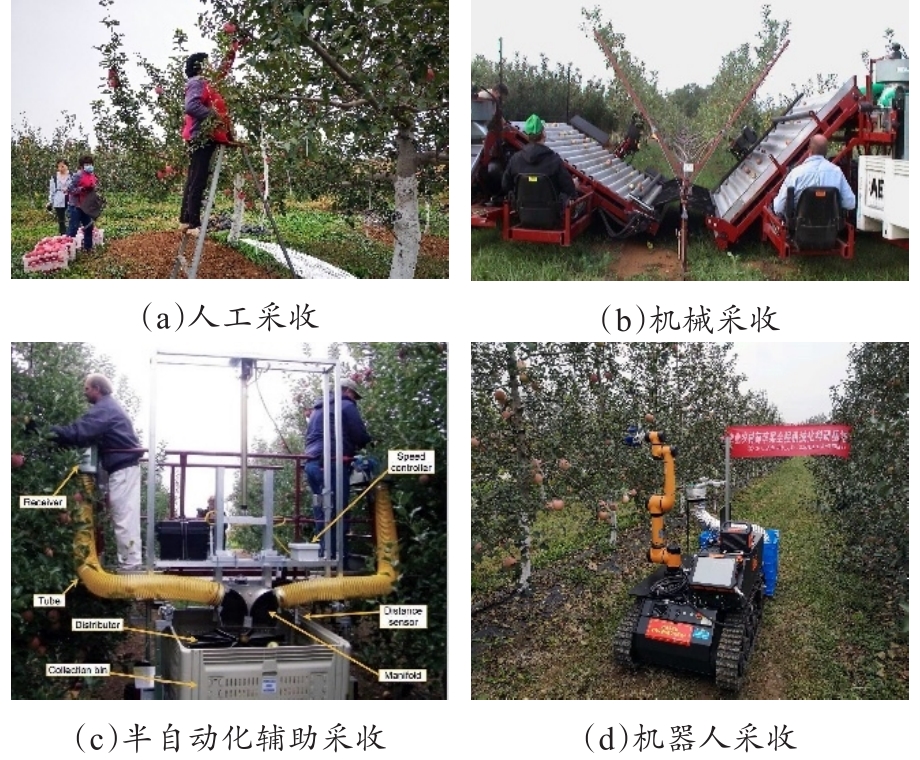
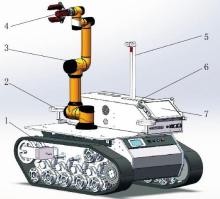
Fig. 7
Apple harvesting robot
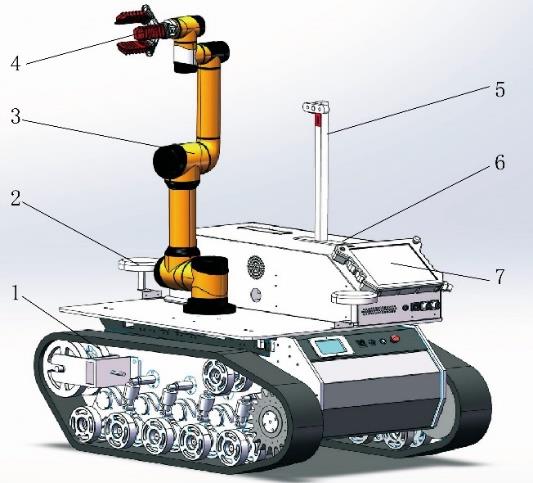
Table 2
Comparison of four types of apple recognition machine learning algorithms
| 机器学习算法 | 特点 | 不足 |
|---|---|---|
| 支持向量机 | 1.是一种非参数方法,具有一定的灵活性 2.可实现复杂功能,同时又能适应过度拟合 | 1.针对大批量果树图像的学习策略难以实施 2.解决青苹果、红苹果、树枝与树叶等多目标分类问题尚存在一定困难 |
| 神经网络 | 1.可以维持非线性算法的高精度 2.确保结果最佳逼近、全局最优、收敛速度快 | 1.可能会出现过拟合、中心难定、学习率偏低 2.网络运行效率和识别精度难以满足要求 |
| 聚类算法 | 1.技术简单、聚类相似输出 2.可被多层堆栈、效果直观 | 1.没有进行全局优化 2.某些情况下,随层数增加会失效,收益递减 |
| 深度学习 | 1.可以自动提取参数。 2.封闭静态环境,训练效果好,精度高。 | 1.对于动态环境效果较差,训练效果不好 2.需要大量数据进行训练,训练结果难以迁移 |

Fig. 8
Common used depth camera


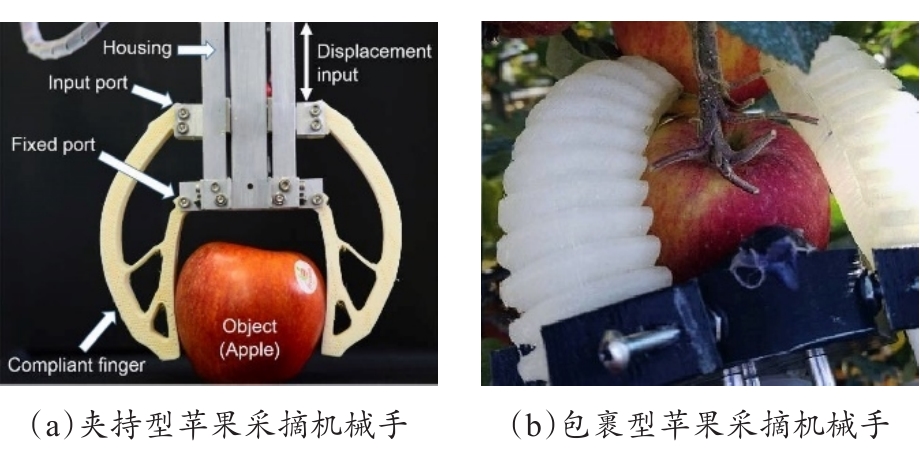
Fig. 9
Types of apple picking manipulator
| 1 | FORSLINE P L, ALDWINCKLE H S, DICKSON E E, et al. Collection, maintenance, characterization and utilization of wild apples of Central Asia[J]. Horticultural Reviews, 2003, 29: 1-61. |
| 2 | 霍学喜, 刘天军, 刘军弟, 等. 2020年度中国苹果产业发展报告(精简版)[J]. 中国果菜, 2022, 42(2): 1-6. |
| HUO X, LIU T, LIU J, et al. 2020 China apple industry development report (simplified version)[J]. China Fruit & Vegetable, 2022, 42(2): 1-6. | |
| 3 | LABORDE D, MARTIN W, SWINNEN J, et al. COVID-19 risks to global food security[J]. Science, 2020, 369(6503): 500-502. |
| 4 | 张旭青, 杜丽永, 朱启荣. 人工成本约束下苹果生产环节资本替代劳动的潜力研究[J]. 农业现代化研究, 2020, 41(3): 484-492. |
| ZHANG X, DU L, ZHU Q. The potential of substituting labors with capitals in apple production under the constraint of increasing labor cost[J]. Research of Agricultural Modernization, 2020, 41(3): 484-492. | |
| 5 | 王衡, 王军山. 烟台市苹果机械化发展现状及发展方向[J]. 山东农机化, 2021, (4): 31-32. |
| 6 | 王韦韦, 陈黎卿, 杨洋, 等. 农业机械底盘技术研究现状与展望[J]. 农业机械学报, 2021, 52(8): 1-15. |
| WANG W, CHEN L, YANG Y, et al. Development and prospect of agricultural machinery chassis technology[J]. Transactions of the CSAM, 2021, 52 ( 8 ) : 1-15. | |
| 7 | 郑永军, 江世界, 陈炳太, 等. 丘陵山区果园机械化技术与装备研究进展[J]. 农业机械学报, 2020, 51(11): 1-20. |
| ZHENG Y, JIANG S, CHEN B, et al. Review on technology and equipment of mechanization in hilly orchard [J]. Transactions of the CSAM, 2020, 51(11): 1-20. | |
| 8 | 李晨硕, 邹娇蓉, 李继光.国外专业型果园轮式拖拉机主要产品概述[J]. 拖拉机与农用运输车, 2021, 48(4): 4-7. |
| LI C, ZOU J, LI J. Overview of main products of professional orchard wheeled tractor in foreign countries[J]. Tractor&Farm Transporter, 2021, 48 (4): 4-7. | |
| 9 | 郝朝会, 杨学军, 刘立晶, 等. 果园多功能动力底盘设计与试验[J]. 农业机械学报, 2018, 49(12): 66-73, 92. |
| HAO C, YANG X, LIU L, et al. Design and experiment of multifunctional dynamic chassis for orchard[J]. Transactions of the CSAM, 2018, 49 (12): 66-73, 92. | |
| 10 | 李昊伦. 基于PLC的小型履带式农用动力底盘控制系统设计[D]. 保定: 河北农业大学, 2021. |
| LI H. Design of small crawler type agricultural power chassis control system based on PLC[D]. Baoding: Hebei Agricultural University, 2021. | |
| 11 | 王锋. 丘陵山地果园动力底盘的坡地通过性研究[D]. 重庆: 西南大学, 2020. |
| WANG F. Study on slope passability of the orchard power chassis in hilly area[D]. Chongqing: Southwest University, 2020. | |
| 12 | 郭惠萍, 王常林, 曹亚州, 等. 一种分布驱动式双电池组小型温室电动履带拖拉机: CN114408037A [P]. 2022-04-29. |
| 13 | 范思宇. 果园电动履带底盘轻量化与动力学研究[D]. 广州: 华南农业大学, 2017. |
| FAN S. Lightweight design and dynamics research of chassis frame for orchard electric tracked vehicle[D]. Guangzhou: South China Agricultural University, 2017. | |
| 14 | DE MELO R R, TOFOLI F L, DAHER S, et al. Wheel slip control applied to an electric tractor for improving tractive efficiency and reducing energy consumption[J]. Sensors, 2022, 4527: 1-22. |
| 15 | XIE B, WANG S, WU X, et al. Design and hardware-in-the-loop test of a coupled drive system for electric tractor[J]. Biosystems Engineering, 2022, 216: 165-185. |
| 16 | HOEHN-K W, TOMPSON-W L. Remotely adjustable disk leveling system: 4809786[P]. 1989-03-07. |
| 17 | YUKIKAZU T. Posture controlling device for combine harvester: JP2013055897[P]. 2013-03-28. |
| 18 | 张战文. 微型履带山地拖拉机稳定性能研究[D]. 杨凌: 西北农林科技大学, 2011. |
| ZHANG Z. Research on stability of micro-hillside caterpillar tractor[D]. Yangling: Northwest A&F University, 2011. | |
| 19 | 王涛. 山地拖拉机车身自动调平控制系统的设计与试验[D]. 杨凌: 西北农林科技大学, 2014. |
| WANG T. Design and test of the hillside tractor body automatic leveling control system[D]. Yangling: Northwest A&F University, 2014. | |
| 20 | WANG Y, YANG F, PAN G, et al. Design and testing of a small remote-control hillside tractor[J]. Transactions of the ASABE, 2014, 57(2): 363-370. |
| 21 | 齐文超. 丘山地拖拉机姿态主动调整系统研究 [D]. 上海: 上海交通大学, 2020. |
| QI W. Research om active attitude adjustment system of tractors in hilly mountains[D]. Shanghai: Shanghai Jiao Tong University, 2020. | |
| 22 | 孙景彬, 楚国评, 潘冠廷, 等. 遥控全向调平山地履带拖拉机设计与性能试验[J]. 农业机械学报, 2021, 52(5): 358-369. |
| SUN J, CHU G, PAN G, et al. Design and performance test of remote control omnidirectional leveling hillside crawler tractor[J]. Transactions of the CSAM, 2021, 52(5): 358-369. | |
| 23 | LI Y, HUANG F, LIU C. Coordinated control of working implements-vehicle body for terrain adaptation of a robotized hilly tractor[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 216: 165-185. |
| 24 | 刘成良, 林洪振, 李彦明, 等. 农业装备智能控制技术研究现状与发展趋势分析[J]. 农业机械学报, 2020, 51(1): 1-18. |
| LIU C, LIN H, LI Y, et al. Analysis on status and development trend of intelligent control technology for agricultural equipment[J]. Transactions of the CSAM, 2020, 51(1): 1-18. | |
| 25 | 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. |
| ZHANG M, JI Y, LI S, et al. Research progress of agricultural machinery navigation technology[J]. Transactions of the CSAM, 2020, 51(4): 1-18. | |
| 26 | 罗锡文, 廖娟, 邹湘军, 等. 信息技术提升农业机械化水平[J]. 农业工程学报, 2016, 32(20): 1-14. |
| LUO X, LIAO J, ZOU X, et al. Enhancing agricultural mechanization level through information technology[J]. Transactions of the CSAE, 2016, 32(20): 1-14. | |
| 27 | 李会宾, 韩伟, 史云. 果园作业机器人的自主行间导航系统研究[J]. 中国农业信息, 2019, 31(4): 51-64. |
| LI H, HAN W, SHI Y. Autonomous inter-line navigation system for orchard robots[J]. China Agricultural Information, 2019, 31(4): 51-64. | |
| 28 | 胡静涛, 高雷, 白晓平, 等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10): 1-10. |
| HU J, GAO L, BAI X, et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the CSAE, 2015, 31(10): 1-10. | |
| 29 | 莫冬炎, 杨尘宇, 黄沛琛, 等. 基于环境感知的果园机器人自主导航技术研究进展[J]. 机电工程技术, 2021, 50(9): 145-150. |
| MO D, YANG C, HUANG P, et al. Research progress of autonomous navigation technology for orchard robots based on environment perception[J]. Mechanical & Electrical Engineering Technology, 2021, 50(9): 145-150. | |
| 30 | 徐俊杰. 基于视觉的丘陵山区田间道路场景理解和障碍物检测研究[D]. 重庆: 西南大学, 2019. |
| XU J. Research for field road scene recognition and obstacle detection in hilly areas based on vision[D]. Chongqing: Southwest University, 2019. | |
| 31 | 刘星星, 张超, 张浩, 等. 最小二乘法与SVM组合的林果行间自主导航方法[J]. 农业工程学报, 2021, 37(9): 157-164. |
| LIU X, ZHANG C, ZHANG H, et al. Inter-row automatic navigation method by combining least square and SVM in forestry[J]. Transactions of the CSAE, 2021, 37(9): 157-164. | |
| 32 | 刘志杰, 王小乐, 任志刚, 等. 基于虚拟雷达模型的履带拖拉机导航路径跟踪控制算法[J]. 农业机械学报, 2021, 52(6): 376-385. |
| LIU Z, WANG X, REN Z, et al. Crawler tractor navigation path tracking control algorithm based on virtual radar model[J]. Transactions of the CSAM, 2021, 52(6): 376-385. | |
| 33 | 刘伟洪, 何雄奎, 刘亚佳, 等. 果园行间3D LiDAR导航方法[J]. 农业工程学报, 2021, 37(9): 165-174. |
| LIU W, HE X, LIU Y, et al. Navigation method between rows for orchard based on 3D LiDAR[J]. Transactions of the CSAE, 2021, 37(9): 165-174. | |
| 34 | GUEVARA J, CHEEIN F A. A, GENE-MOLA J,et al. Analyzing and overcoming the effects of GNSS error on LiDAR based orchard parameters estimation[J]. Computers and Electronics in Agriculture, 2020, 170: 1-10. |
| 35 | ZHANG L, ZHANG R, LI L, et al. Research on virtual Ackerman steering model based navigation system for tracked vehicles[J]. Computers and Electronics in Agriculture, 2022, 192: 1-13. |
| 36 | 于威, 韩晓梅. 现代化果园机械除草装备与技术应用现状及发展趋向[J]. 现代农村科技, 2017, (6): 97. |
| 37 | 李江国, 刘占良, 张晋国, 等. 国内外田间机械除草技术研究现状[J]. 农机化研究, 2006(10): 14-16. |
| LI J, LIU Z, ZHANG J, et al. Review of mechanical weeding technique in field at home and abroad [J]. Journal of Agricultural Mechanization Research, 2006(10): 14-16. | |
| 38 | 杨天, 赵武云, 陈伯鸿, 等. 我国果园割草机发展现状与展望[J]. 农业工程, 2022, 12(1): 5-14. |
| YANG T, ZHAO W, CHEN B, et al. Development status and prospect of orchard lawn mower in China[J]. Agricultural Engineering, 2022, 12(1): 5-14. | |
| 39 | 杨硕, 李法德, 闫银发, 等. 果园株间机械除草技术研究进展与分析[J]. 农机化研究, 2020, 42(10): 1-8, 16. |
| YANG S, LI F, YAN Y, et al. Research progress and analysis of intra-Row mechanical weeding technology for orchards[J]. Journal of Agricultural Mechanization Research, 2020, 42(10): 1-8, 16. | |
| 40 | 王永烁, 康建明, 彭强吉, 等. 果树株间避障除草机设计与试验[J]. 吉林大学学报(工学版), 2022, 20(2): 1-11. |
| WANG Y, KANG J, PENG Q, et al. Design and experiment of obstacle avoidance weeding machine for fruit trees[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 20(2): 1-11. | |
| 41 | 徐丽明, 赵诗建, 马帅, 等. 葡萄株间除草机精准避障控制系统优化设计与试验[J]. 农业工程学报, 2021, 37(15): 31-39. |
| XU L, ZHAO S, MA S, et al. Optimized design and experiment of the precise obstacle avoidance control system for a grape interplant weeding machine[J]. Transactions of the CSAE, 2021, 37(15): 31-39. | |
| 42 | 徐丽明, 于畅畅, 刘文, 等. 篱架式栽培葡萄株间除草机自动避障机构优化设计[J]. 农业工程学报, 2018, 34(7): 23-30. |
| XU L, YU C, LIU W, et al. Optimal design on auto obstacle avoidance mechanism of intra-row weeder for trellis cultivated grape[J]. Transactions of the CSAE, 2018, 34(7): 23-30. | |
| 43 | 李雪军, 毛雷, 杨欣, 等. 果园割草机垄面切割装置振动特性分析[J]. 中国农机化学报, 2020, 41(11): 51-59. |
| LI X, MAO L, YANG X, et al. Analysis of vibration characteristics of ridge surface device of orchard mower[J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 51-59. | |
| 44 | 朱站伟, 汤智辉, 何义川, 等. 果园株间除草自动避障装置的设计与试验[J]. 农机化研究, 2020, 42(6): 147-153. |
| ZHU Z, TANG Z, HE Y, et al. Design and experiment of automatic obstacle avoidance device for weeding between plants[J]. Journal of Agricultural Mechanization Research, 2020, 42(6): 147-153. | |
| 45 | 史璐, 刘洪杰, 刘伟起, 等. 基于激光雷达的果园割草机避障方法研究[J]. 农机化研究, 2023, 45(2): 62-66. |
| SHI L, LIU H, LIU W, et al. Research on obstacle avoidance method of orchard mower based on LiDAR[J]. Journal of Agricultural Mechanization Research, 2023, 45(2): 62-66. | |
| 46 | AVERILL K M, WESTBROOK A S, PINEDA-BERMUDEZ L, et al. Effects of Tertill® weeding robot on weed abundance and diversity[J]. Agronomy, 2022, 12(8): 1754. |
| 47 | REISER D, SEHSAH E, BUMANN O, et al. Development of an autonomous electric robot implement for intra-row weeding in vineyards[J]. Agriculture, 2019, 9(18): 1-12. |
| 48 | 张梦娇. 基于双目视觉技术的果园割草机避障系统设计[D]. 保定: 河北农业大学, 2019. |
| ZHANG M. Design of obstacle avoidance system of orchard lawn mower based on binocular vision technology[D]. Baoding: Hebei Agricultural University, 2019. | |
| 49 | 冯吉. 基于机器视觉和激光雷达的割草机前方障碍物检测[D]. 保定: 河北农业大学, 2020. |
| FENG J. Obstacle detection in front of mower based on machine vision and LiDAR[D]. Baoding: Hebei Agricultural University, 2020. | |
| 50 | 徐雄飞. 果园生草技术[J]. 安徽农学通报, 2022, 28(3): 69-70, 78. |
| XU X. Grass-growing techniques in orchards[J]. Anhui Agricultural Science Bulletin, 2022, 28(3): 69-70, 78. | |
| 51 | LI Y, AL-SARAYREH M, IRIE K, et al. Identification of weeds based on hyperspectral imaging and machine learning[J]. Frontiers in Plant Science, 2021, 11(61): 1-13. |
| 52 | ESPEJO-GARCIA B, MYLONAS N, ATHANASAKOS L, et al. Towards weeds identification assistance through transfer learning[J]. Computers and Electronics in Agriculture, 2020, 171: 1-10. |
| 53 | RAJA R, SLAUGHTER D C, FENNIMORE S A, et al. Crop signalling: A novel crop recognition technique for robotic weed control[J]. Biosystems Engineering, 2019, 187: 278-291. |
| 54 | 赵辉, 曹宇航, 岳有军, 等. 基于改进DenseNet的田间杂草识别[J]. 农业工程学报, 2021, 37(18): 136-142. |
| ZHAO H, CAO Y, YUE Y, et al. Improved DenseNet-based weed identification in the field[J]. Transactions of the CSAE, 2021, 37(18): 136-142. | |
| 55 | 徐艳蕾, 何润, 翟钰婷, 等. 基于轻量卷积网络的田间自然环境杂草识别方法[J]. 吉林大学学报(工学版), 2021, 51(6): 2304-2312. |
| XU Y, HE R, ZHAI Y, et al. Weed identification method based on deep transfer learning in field natural environment[J]. Journal of Jilin University (Engineering), 2021, 51(6): 2304-2312. | |
| 56 | 林芬芳, 张东彦, 王秀, 等. 基于偏振光谱的叶片尺度下玉米与杂草识别研究(英文)[J]. 红外与激光工程, 2016, 45(12): 361-370. |
| LIN F, ZHANG D, WANG X, et al. Identification of corn and weeds on the leaf scale using polarization spectroscopy[J]. Infrared and Laser Engineering, 2016, 45(12): 361-370. | |
| 57 | 李开敬, 许燕, 周建平, 等. 基于Faster R-CNN和数据增强的棉田苗期杂草识别方法[J]. 新疆大学学报(自然科学版)(中英文), 2021, 38(4): 450-456. |
| LI K, XU Y, ZHOU J, et al. Cotton field seedling weed identification method based on Faster R-CNN and data enhancement[J]. Journal of Xinjiang University (Natural Science Edition in Chinese and English), 2021, 38(4): 450-456. | |
| 58 | 许燕, 温德圣, 周建平, 等. 基于Faster R-CNN的新疆棉花幼苗与杂草识别方法[J]. 排灌机械工程学报, 2021, 39(6): 602-607. |
| XU Y, WEN D, ZHOU J, et al. Identification method of cotton seedlings and weeds in Xinjiang based on Faster R-CNN[J]. Journal of Drainage and Irrigation Machinery Engineering, 2021, 39(6): 602-607. | |
| 59 | 傅雷扬, 李绍稳, 张乐, 等. 田间除草机器人研究进展综述[J]. 机器人, 2021, 43(6): 751-768. |
| FU L, LI S, ZHANG L, et al. Research progress on field weeding robots: A review[J]. Robot, 2021, 43(6): 751-768. | |
| 60 | LOTTES P, STACHNISS C. Semi-supervised online visual crop and weed classification in precision farming exploiting plant arrangement[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems(iros). Piscataway, New York, USA: IEEE, 2017: 5155-5161. |
| 61 | 苗中华, 余孝有, 徐美红, 等. 基于图像处理多算法融合的杂草检测方法及试验[J]. 智慧农业(中英文), 2020, 2(4): 103-115. |
| MIAO Z, YU X, XU M, et al. Weed detection method and experiment based on multi-algorithm fusion for image processing[J]. Smart Agriculture, 2020, 2(4): 103-115. | |
| 62 | WU Z, CHEN Y, ZHAO B, et al. Review of weed detection methods based on computer vision[J]. Sensors, 2021, 21(11): 1-23. |
| 63 | 杨鹏程. 果园株间除草机械臂的设计与控制研究[D]. 南京: 江苏大学, 2021. |
| YANG P. Design and control of a robotic arm for inter-plant weeding in orchards[D]. Nanjing: Jiangsu University, 2021. | |
| 64 | O'DOGHERTY M J, GODWIN R J, DEDOUSIS A P, et al. A mathematical model of the kinematics of a rotating disc for inter- and intra-row hoeing[J]. Biosystems Engineering, 2007, 96(2): 169-179. |
| 65 | MELANDER B. Optimization of the adjustment of a vertical axis rotary brush weeder for intra-row weed control in row crops[J]. Journal of Agricultural Engineering Research, 1997, 68: 39-50. |
| 66 | DUERINCKX K, MOUAZEN A M, ANTHONIS J, et al. Effects of spring-tine settings and operational conditions on the mechanical performance of a weed harrow tine[J]. Biosystems Engineering, 2005, 91(1): 21-34. |
| 67 | 邢钦淞, 丁素明, 薛新宇, 等. 智能田间除草机器人发展现状研究[J]. 中国农机化学报, 2022, 43(8): 173-181. |
| XING Q, DING S, XUE X, et al. Research on development status of intelligent field weeding robot [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(8): 173-181. | |
| 68 | 王洪昌. 基于鼢鼠爪趾几何结构特征的苗间仿生除草铲设计[D]. 长春: 吉林大学, 2015. |
| WANG H. Design of intra-row bionic weeding blade based on geometric characteristic of claws of myospalax[D]. Changchun: Jilin University, 2015. | |
| 69 | 闫东伟. 基于水射流的水田仿生中耕除草装置机理与试验研究[D]. 哈尔滨: 东北农业大学, 2021. |
| YAN D. Mechanism and experimental study on bionic weeding device for paddy field based on water jet[D]. Harbin: Northeast Agricultural University, 2021. | |
| 70 | 权龙哲, 张景禹, 姜伟, 等. 基于玉米根系保护的株间除草机器人系统设计与试验[J]. 农业机械学报, 2021, 52(12): 115-123. |
| QUAN L, ZHANG J, JIANG W, et al. Development and experiment of intra-row weeding robot system based on protection of maize root system[J]. Transactions of the CSAM, 2021, 52(12): 115-123. | |
| 71 | SILWAL A, KARKEE M, ZHANG Q. A hierarchical approach to apple identification for robotic harvesting[J]. Transactions of the ASABE, 2016, 59(5): 1079-1086. |
| 72 | D'ESNON A . G. Robotic harvesting of apples [C]//Agri-Mation 1 Conference and Exposition. Chicago, USA: ASAE, 1985: 210-214 |
| 73 | KONDO N, TING K C. Robotics for bioproduction systems[M]. Washington: American Society of Agricultural Engineers, 1998: 5-98. |
| 74 | BU L, CHEN C, HUI G, et al. Technological development of robotic apple harvesters: A review[J]. INMATEH-Agricultural Engineering, 2020, 61(2): 151-164. |
| 75 | PETERSON D L, WOLFORD S D. Fresh market quality tree fruit harvester part II: Apples[J]. Applied Engineering in Agriculture, 2003, 19(5): 545-548. |
| 76 | ZHANG Z, HEINEMANN P H, SCHUPP J R, et al. Design and field test of a low-cost apple harvest-assist unit[J]. Transactions of the ASABE, 2016, 59: 1149-1156. |
| 77 | TIAN Y, YANG G, WANG Z, et al. Apple detection during different growth stages in orchards using the improved YOLO-V3 model[J]. Computers and Electronics in Agriculture, 2019, 157: 417-426. |
| 78 | ZHANG Z, IGATHINATHANE C, LI J, et al. Technology progress in mechanical harvest of fresh market apples[J]. Computers and Electronics in Agriculture, 2020, 175: 1-13. |
| 79 | LU Y, LU R. Detection of surface and subsurface defects of apples using structured- illumination reflectance imaging with machine learning algorithms[J]. Transactions of the ASABE, 2018, 61(6): 1831-1842. |
| 80 | YAN B, FAN P, LEI X, et al. A real-time apple targets detection method for picking robot based on improved YOLOv5[J]. Remote Sensing, 2021, 13(1619): 1-23. |
| 81 | 李赫. 基于深度学习的多目标识别和定位研究[D]. 秦皇岛: 燕山大学, 2021. |
| LI H. Multi-target recognition and location based on deep learning[D]. Qinhuangdao: Yanshan University, 2021. | |
| 82 | 张世福. 基于深度学习的苹果目标识别与定位算法研究[D]. 杭州: 浙江工业大学, 2020. |
| ZHANG S. Research on apple target recognition and location algorithm based on deep learning[D]. Hangzhou: Zhejiang University of Technology, 2020. | |
| 83 | 田博凯.基于深度学习的复杂环境下苹果检测分类与定位技术研究[D]. 天津: 天津理工大学, 2020. |
| TIAN B. Research on apple detection classification and location technology in complex environment based on deep learning[D]. Tianjin: Tianjin University of Technology, 2020. | |
| 84 | 金保华, 殷长魁, 张卫正, 等. 基于机器视觉的苹果园果实识别研究综述[J]. 轻工学报, 2019, 34(2): 71-81. |
| JIN B, YIN C, ZHANG W, et al. Review on apple garden fruit recognition based on machine vision[J]. Journal of Light Industry, 2019, 34(2): 71-81. | |
| 85 | ZHANG X, HE L, ZHANG J, et al. Determination of key canopy parameters for mass mechanical apple harvesting using supervised machine learning and principal component analysis (PCA)[J]. Biosystems Engineering, 2020, 193: 247-263. |
| 86 | DONG W, ROY P, ISLER V. Semantic mapping for orchard environments by merging two-sides reconstructions of tree rows[J]. Journal of Field Robotics, 2020, 37: 97-121. |
| 87 | LIN G, TANG Y, ZOU X, et al. Color‑, depth‑, and shape‑based 3D fruit detection[J]. Precision Agriculture, 2020, 21: 1-17. |
| 88 | GENÉ-MOLA J, VILAPLANA V, ROSELL-POLO J R, et al. Multi-modal deep learning for Fuji apple detection using RGB-D cameras and their radiometric capabilities[J]. Computers and Electronics in Agriculture, 2019, 162: 689-698. |
| 89 | 夏雪, 孙琦鑫, 侍啸, 等. 基于轻量级无锚点深度卷积神经网络的树上苹果检测模型[J]. 智慧农业(中英文), 2020, 2(1): 99-110. |
| XIA X, SUN Q, SHI X, et al. Apple detection model based on lightweight anchor-free deep convolutional neural network[J]. Smart Agriculture, 2020, 2(1): 99-110. | |
| 90 | WAN S, GOUDOS S. Faster R-CNN for multi-class fruit detection using a robotic vision system[J]. Computer Networks, 2020, 168: 1-6. |
| 91 | KUZNETSOVA A, MALEVA T, SOLOVIEV V. Using YOLOv3 Algorithm with pre- and post-processing for apple detection in fruit-harvesting robot[J]. Agronomy, 2020, 10(7): ID 1016. |
| 92 | KOIRALA A, WALSH K B, WANG Z, et al. Deep learning-Method overview and review of use for fruit detection and yield estimation[J]. Computers and Electronics in Agriculture, 2019, 162: 219-234. |
| 93 | FAN P, LANG G, YAN B, et al. A method of segmenting apples based on gray-centered RGB color space[J]. Remote Sensing, 2021, 13(1211): 1-17. |
| 94 | ZHANG W, CHEN K, WANG J, et al. Easy domain adaptation method for filling the species gap in deep learning-based fruit detection[J]. Horticulture Research, 2021, 8(119): 1-13. |
| 95 | 王丹丹, 宋怀波, 何东健. 苹果采摘机器人视觉系统研究进展[J]. 农业工程学报, 2017, 33(10): 59-69. |
| WANG D, SONG H, HE D. Research advance on vision system of apple picking robot[J]. Transactions of the CSAE, 2017, 33(10): 59-69. | |
| 96 | PARRISH E A, GOKSEL A KJR. Pictorial pattern recognition applied to fruit harvesting[J]. Transactions of the ASAE, 1977, 20(5): 822-827. |
| 97 | FENG J, WANG S, LIU G, et al. A separating method of adjacent apples based on machine vision and chain code information[C]// International Conference on Computer and Computing Technologies in Agriculture. Berlin, German: Heidelberg Springer, 2012: 258-267. |
| 98 | JIAO Y, LUO R, LI Q, et al. Detection and localization of overlapped fruits application in an apple harvesting robot[J]. Electronics, 2020, 9(1023): 1-14. |
| 99 | 江梅, 孙飒爽, 何东健, 等. 融合K-means聚类分割算法与凸壳原理的遮挡苹果目标识别与定位方法[J]. 智慧农业, 2019, 1(2): 45-54. |
| JIANG M, SUN S, HE D, et al. Recognition and localization method of occluded apples based on K-means cluster-ing segmentation algorithm and convex hull theory[J]. Smart Agriculture, 2019, 1(2): 45-54. | |
| 100 | LI T, FENG Q, QIU Q, et al. Occluded apple fruit detection and localization with a frustum-based point-cloud-processing approach for robotic harvesting[J]. Remote Sensing, 2022, 14(482): 1-18. |
| 101 | BAETEN J, DONN'E K, BOEDRIJ S, et al. Autonomous fruit picking machine: A robotic apple harvester[J]. Springer Tracts in Advanced Robotics, 2008, 42: 531-539. |
| 102 | JI W, MENG X, QIAN Z, et al. Branch localization method based on the skeleton feature extraction and stereo matching for apple harvesting robot[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-9. |
| 103 | HOHIMER C J. WANG H, BHUSAL S,et al. Design and field evaluation of a robot apple harvesting system with 3D printed soft-robotic end-effector[J]. Transactions of the ASABE, 2019, 62(2): 405-414. |
| 104 | SI Y. Location of apples in trees using stereoscopic vision[J]. Computers and Electronics in Agriculture, 2015, 112: 68-74. |
| 105 | JIMENEZ A R, CERES R, PONS J L. A survey of computer vision methods for locating fruit on trees[J]. Transactions of the ASAE, 2000, 43(6): 1911-1920. |
| 106 | NGUYEN T T, VANDEVOORDE K, WOUTERS N, et al. Detection of red and bicoloured apples on tree with an RGB-D camera[J]. Biosystems Engineering, 2016, 146: 33-44. |
| 107 | 卜令昕. 结构化果园苹果收获机器人关键技术研究[D]. 杨凌: 西北农林科技大学, 2021. |
| BU L. Research on key technology of structured orchard apple harvesting robot[D]. Yangling: Northwest A&F University, 2021. | |
| 108 | GONGAL A, AMATYA S, KARKEE M, et al. Sensors and systems for fruit detection and localization: A review[J]. Computers and Electronics in Agriculture, 2022, 39(3): 281-311. |
| 109 | 吴剑桥, 范圣哲, 贡亮, 等. 果蔬采摘机器手系统设计与控制技术研究现状和发展趋势[J]. 智慧农业(中英文), 2020, 2(4): 17-40. |
| WU J, FAN S, GONG L, et al. Research status and development direction of design and control technology of fruit and vegetable picking robot system[J]. Smart Agriculture, 2020, 2(4): 17-40. | |
| 110 | BULANON D M, KATAOKA T. Fruit detection system and an end effector for robotic harvesting of Fuji apples[J]. Agricultural Engineering International: CIGR Journal, 2010, 12(1): 203-210. |
| 111 | 丁一, 姬伟, 许波, 等. 苹果采摘机器人柔顺抓取的参数自整定阻抗控制[J]. 农业工程学报, 2019, 35(22): 257-266. |
| DING Y, JI W, XU B, et al. Parameter self-tuning impedance control for compliance grasp of apple harvesting robot[J]. Transactions of the CSAE, 2019, 35 (22): 257, 266. | |
| 112 | FAN P, YAN B, WANG M, et al. Three-finger grasp planning and experimental analysis of picking patterns for robotic apple harvesting[J]. Computers and Electronics in Agriculture, 2021, 188: 1-11. |
| 113 | ZHAO H, O'BRIEN K, LI S, et al. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides[J]. Science Robotics, 2016, 1(1): 1-10. |
| 114 | YAP H K, NG H Y, YEOW C H. High-force soft printable pneumatics for soft robotic applications[J]. Soft Robotics, 2016, 3(3): 144-158. |
| 115 | KHALED E, NIELS L, MICHAEL J. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach[J]. Mechatronics, 2018, 50: 234-247. |
| 116 | GLICKP, SURESHS, RUFFATTOD, et al. A soft robotic gripper with gecko-inspired adhesive[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 903-910. |
| 117 | RUS D, TOLLEY M T. Design fabrication and control of soft robots[J]. Nature, 2015, 521: 467-475. |
| 118 | 刘晓敏, 田德宝, 宋懋征, 等. 气动球果采摘柔性手爪设计与实验[J]. 农业机械学报, 2021, 52(2): 30-43. |
| LIU X, TIAN D, SONG M, et al. Design and experiment on pneumatic flexible gripper for picking globose fruit[J]. Transactions of the CSAM, 2021, 52 (2): 30-43. | |
| 119 | PARK W, SEO S, BAE J. A hybrid gripper with soft material and rigid structures[J]. IEEE Robotics and Automation Letters, 2019, 4: 65-72. |
| 120 | LIUC H, CHIUC H, CHENT L, et al. A Soft robotic gripper module with 3d printed compliant fingers for grasping fruits[C]// The 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (aim). Piscataway, New York, USA: IEEE, 2018: 736-741. |
| 121 | HOHIMER C J, WANG H, BHUSAL S, et al. Design and field evaluation of a robotic apple harvesting system with a 3D-printed soft-robotic end-effector[J]. Transactions of the ASABE, 2018, 62(2): 405-414. |
| 122 | 李铁风, 李国瑞, 梁艺鸣, 等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报, 2016, 48(4): 756-766. |
| LI T, LI G, LIANG Y, et al. Review of materials and structures in soft robotics[J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48 (4): 756-766. | |
| 123 | CHEN X, ZHANG X, HUANG Y, et al. A review of soft manipulator research applications and opportunities[J]. Journal of Field Robotics, 2022, 39(3): 281-311. |
| 124 | GRAZIOSO S, GIRONIMO G D, SICILIANO B. A geometrically exact model for soft continuum robots: The finite element deformation space formulation[J]. Soft Robotics, 2019, 6(6): 790-811. |
| 125 | RENDA F, GIORELLI M, CALISTI M, et al. Dynamic model of a multibending soft robot arm driven by cables[J]. IEEE Transactions on Robotics, 2014, 30(5): 1109-1122. |
| 126 | CHEN X, ZHANG X, LIU H, et al. Design and development of a soft robotic manipulator[J]. International Journal of Mechanics and Materials in Design, 2020, 16: 309-321. |
| 127 | WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: A review[J]. The International Journal of Robotics Research, 2010, 29(13): 1661-1683. |
| 128 | NASELLI G A, MAZZOLAI Barbara. The softness distribution index: Towards the creation of guidelines for the modeling of soft‐bodied robots[J]. The International Journal of Robotics Research, 2021, 40(1): 197-223. |
| 129 | MURRAY R M, DENO D C, PISTER K S J, et al. Control primitives for robot systems[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1992, 22(1): 183-193. |
| [1] | WANG Jian, ZHAO Haosen, MA Yue, XING Bin, ZHU Wenying. Research Progress and Prospects of Intelligent Control Technology for Facility Vegetable [J]. Smart Agriculture, 2026, 8(1): 104-119. |
| [2] | WEI Peigang, CAO Shanshan, LIU Jifang, LIU Zhenhu, SUN Wei, KONG Fantao. Embodied Intelligent Agricultural Robots: Key Technologies, Application Analysis, Challenges and Prospects [J]. Smart Agriculture, 2025, 7(4): 141-158. |
| [3] | ZHANG Le, LI Aixue, CHEN Liping. Electrochemical Sensors for Plant Active Small Molecule Detection: A review [J]. Smart Agriculture, 2025, 7(3): 69-88. |
| [4] | LIU Jifang, ZHOU Xiangyang, LI Min, HAN Shuqing, GUO Leifeng, CHI Liang, YANG Lu, WU Jianzhai. Artificial Intelligence-Driven High-Quality Development of New-Quality Productivity in Animal Husbandry: Restraining Factors, Generation Logic and Promotion Paths [J]. Smart Agriculture, 2025, 7(1): 165-177. |
| [5] | ZHANG Yu, LI Xiangting, SUN Yalin, XUE Aidi, ZHANG Yi, JIANG Hailong, SHEN Weizheng. Real-Time Monitoring Method for Cow Rumination Behavior Based on Edge Computing and Improved MobileNet v3 [J]. Smart Agriculture, 2024, 6(4): 29-41. |
| [6] | ZHANG Fan, ZHOU Mengting, XIONG Benhai, YANG Zhengang, LIU Minze, FENG Wenxiao, TANG Xiangfang. Research Advances and Prospect of Intelligent Monitoring Systems for the Physiological Indicators of Beef Cattle [J]. Smart Agriculture, 2024, 6(4): 1-17. |
| [7] | GUO Wang, YANG Yusen, WU Huarui, ZHU Huaji, MIAO Yisheng, GU Jingqiu. Big Models in Agriculture: Key Technologies, Application and Future Directions [J]. Smart Agriculture, 2024, 6(2): 1-13. |
| [8] | MAO Kebiao, ZHANG Chenyang, SHI Jiancheng, WANG Xuming, GUO Zhonghua, LI Chunshu, DONG Lixin, WU Menxin, SUN Ruijing, WU Shengli, JI Dabin, JIANG Lingmei, ZHAO Tianjie, QIU Yubao, DU Yongming, XU Tongren. The Paradigm Theory and Judgment Conditions of Geophysical Parameter Retrieval Based on Artificial Intelligence [J]. Smart Agriculture, 2023, 5(2): 161-171. |
| [9] | GUI Zechun, ZHAO Sijian. Research Application of Artificial Intelligence in Agricultural Risk Management: A Review [J]. Smart Agriculture, 2023, 5(1): 82-98. |
| [10] | ZHAO Ruixue, YANG Chenxue, ZHENG Jianhua, LI Jiao, WANG Jian. Agricultural Intelligent Knowledge Service: Overview and Future Perspectives [J]. Smart Agriculture, 2022, 4(4): 105-125. |
| [11] | GENG Wenxuan, ZHAO Junye, RUAN Jiwei, HOU Yuehui. Comparative Study of the Regulation Effects of Artificial Intelligence-Assisted Planting Strategies on Strawberry Production in Greenhouse [J]. Smart Agriculture, 2022, 4(2): 183-193. |
| [12] | ZHANG Yu, ZHAO Chunjiang, LIN Sen, GUO Wenzhong, WEN Chaowu, LONG Jiehua. Irrigation Method and Verification of Strawberry Based on Penman-Monteith Model and Path Ranking Algorith [J]. Smart Agriculture, 2021, 3(3): 116-128. |
| [13] | LI Daoliang, LIU Chang. Recent Advances and Future Outlook for Artificial Intelligence in Aquaculture [J]. Smart Agriculture, 2020, 2(3): 1-20. |
| [14] | Xu Min, Zhang Ruirui, Chen Liping, Tang Qing, Xu Gang. Key technology analysis and research progress of UAV intelligent plant protection [J]. Smart Agriculture, 2019, 1(2): 20-33. |
| [15] | Zhao Chunjiang. State-of-the-art and recommended developmental strategic objectivs of smart agriculture [J]. Smart Agriculture, 2019, 1(1): 1-7. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







