Smart Agriculture ›› 2026, Vol. 8 ›› Issue (2): 200-219.doi: 10.12133/j.smartag.SA202506004
• Intelligent Equipment and Systems • Previous Articles
LI Menghao1, WANG Xiaorong1,2,3( ), LIU Zihe1, DUAN Mengyu1, JIN Zhengyang1
), LIU Zihe1, DUAN Mengyu1, JIN Zhengyang1
Received:2025-05-19
Online:2026-03-30
Foundation items:新疆维吾尔自治区青年科学基金项目(2023D01C190); 新一代人工智能国家科技重大专项(2022ZD0115801)
About author:LI Menghao, E-mail: LiMenghao@stu.xju.edu.cn
corresponding author:
CLC Number:
LI Menghao, WANG Xiaorong, LIU Zihe, DUAN Mengyu, JIN Zhengyang. DEMA-3D TSP: An Enhanced Reinforcement Learning with DEMA Attention in Sequence Optimization for Safflower Picking Robot[J]. Smart Agriculture, 2026, 8(2): 200-219.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202506004

Fig. 1
Flowchart of safflower picking by parallel robot
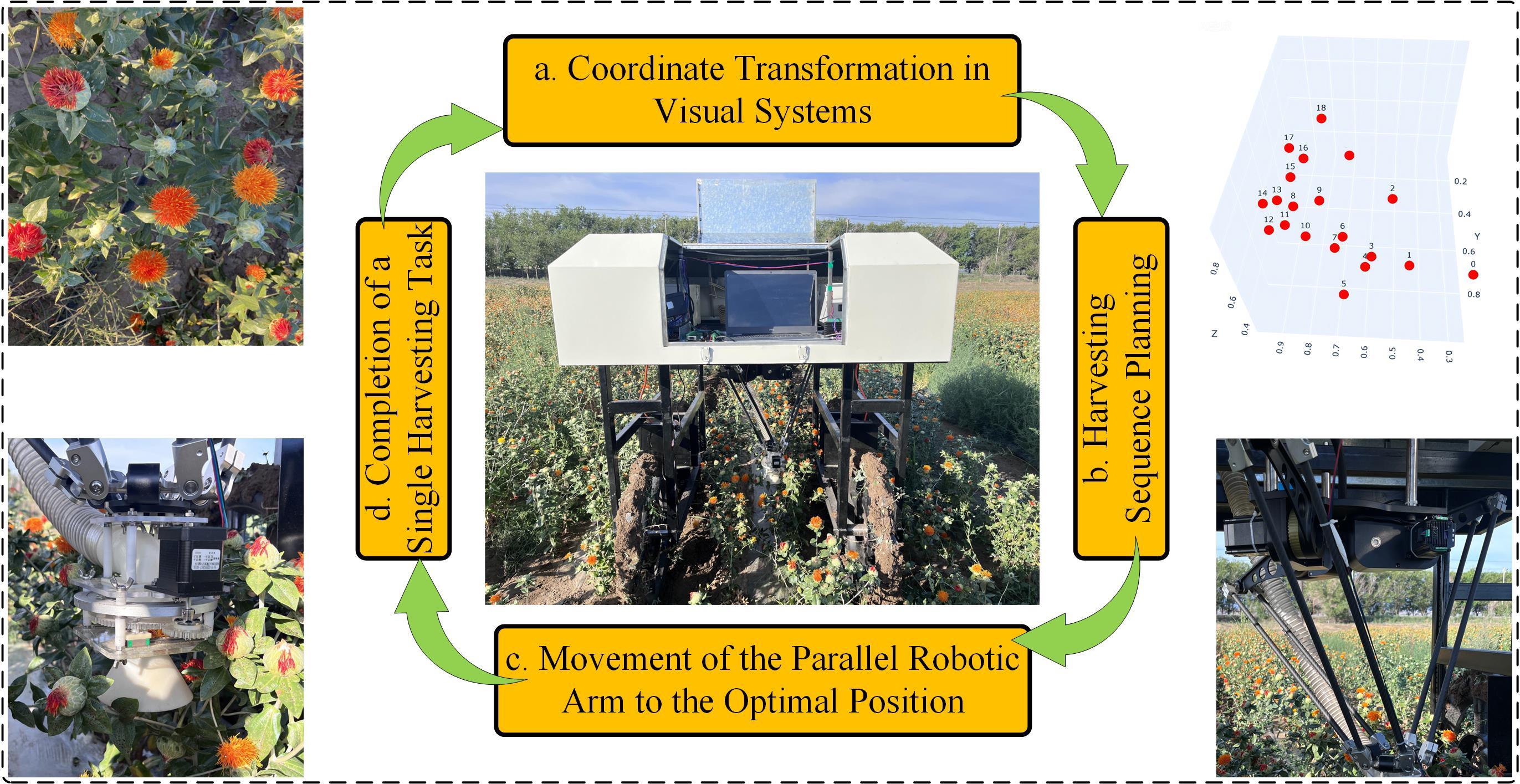
Table 1
Spatial distribution and 3D coordinates of 25 safflower targets
| Spatial distribution | Label | Coordinate points | Label | Coordinate points |
|---|---|---|---|---|
| | 1 | (0.370 85, 0.225 16, 0.845 60) | 14 | (0.107 30, 0.718 10, 0.351 90) |
| 2 | (0.2607 1, 0.3415 2, 0.684 10) | 15 | (0.444 20, 0.735 80, 0.791 80) | |
| 3 | (0.150 57, 0.274 46, 0.719 60) | 16 | (0.668 30, 0.909 50, 0.713 80) | |
| 4 | (0.083 69, 0.296 23, 0.402 10) | 17 | (0.829 70, 0.785 10, 0.691 60) | |
| 5 | (0.091 51, 0.540 71, 0.899 40) | 18 | (0.773 30, 0.714 30, 0.719 50) | |
| 6 | (0.407 40, 0.517 10, 0.910 40) | 19 | (0.794 20, 0.560 00, 0.591 80) | |
| 7 | (0.549 00, 0.278 40, 0.820 40) | 20 | (0.896 50, 0.643 30, 0.628 80) | |
| 8 | (0.608 00, 0.065 50, 0.524 90) | 21 | (0.942 30, 0.594 00, 0.613 50) | |
| 9 | (0.820 50, 0.177 80, 0.694 80) | 22 | (0.938 50, 0.692 60, 0.634 90) | |
| 10 | (0.619 90, 0.457 80, 0.710 90) | 23 | (0.968 60, 0.824 70, 0.490 60) | |
| 11 | (0.551 69, 0.434 36, 0.694 90) | 24 | (0.841 50, 0.897 50, 0.391 80) | |
| 12 | (0.529 40, 0.564 48, 0.701 90) | 25 | (0.801 60, 0.962 40, 0.361 80) | |
| 13 | (0.284 33, 0.649 31, 0.872 60) |
Table 3
Spatial distribution and 3D coordinates of 43 safflower targets
| Spatial distribution | Label | Coordinate points | Label | Coordinate points |
|---|---|---|---|---|
| | 1 | (0.066 90, 0.944 80, 0.220 69) | 23 | (0.958 28, 0.501 20, 0.077 57) |
| 2 | (0.272 09, 0.007 86, 0.789 90) | 24 | (0.978 76, 0.869 70, 0.144 32) | |
| 3 | (0.291 00, 0.675 90, 0.498 20) | 25 | (0.413 78, 0.755 43, 0.050 40) | |
| 4 | (0.274 50, 0.580 01, 0.828 09) | 26 | (0.280 54, 0.011 32, 0.336 20) | |
| 5 | (0.387 98, 0.546 18, 0.486 30) | 27 | (0.236 89, 0.745 04, 0.409 20) | |
| 6 | (0.026 03, 0.840 90, 0.239 20) | 28 | (0.970 50, 0.141 88, 0.509 40) | |
| 7 | (0.017 18, 0.414 45, 0.101 10) | 29 | (0.881 24, 0.569 85, 0.649 90) | |
| 8 | (0.927 67, 0.631 05, 0.318 80) | 30 | (0.582 91, 0.902 41, 0.734 50) | |
| 9 | (0.371 76, 0.722 19, 0.901 90) | 31 | (0.662 84, 0.021 60, 0.092 40) | |
| 10 | (0.269 97, 0.768 43, 0.741 02) | 32 | (0.204 40, 0.369 01, 0.800 06) | |
| 11 | (0.725 02, 0.085 77, 0.862 82) | 33 | (0.169 60, 0.898 20, 0.854 90) | |
| 12 | (0.559 95, 0.614 29, 0.183 17) | 34 | (0.839 21, 0.173 10, 0.265 33) | |
| 13 | (0.884 94, 0.752 67, 0.490 53) | 35 | (0.513 48, 0.998 80, 0.585 30) | |
| 14 | (0.783 94, 0.016 53, 0.096 84) | 36 | (0.033 25, 0.672 79, 0.615 30) | |
| 15 | (0.787 99, 0.435 66, 0.371 51) | 37 | (0.549 80, 0.890 58, 0.660 40) | |
| 16 | (0.122 35, 0.477 45, 0.504 56) | 38 | (0.298 60, 0.111 27, 0.308 30) | |
| 17 | (0.297 22, 0.291 65, 0.551 51) | 39 | (0.636 40, 0.499 50, 0.296 30) | |
| 18 | (0.321 45, 0.471 07, 0.879 74) | 40 | (0.824 54, 0.998 80, 0.981 20) | |
| 19 | (0.831 73, 0.542 33, 0.048 44) | 41 | (0.971 44, 0.608 50, 0.847 90) | |
| 20 | (0.105 04, 0.866 72, 0.470 37) | 42 | (0.372 60, 0.688 90, 0.952 72) | |
| 21 | (0.048 52, 0.678 90, 0.475 20) | 43 | (0.611 60, 0.412 78, 0.091 30) | |
| 22 | (0.344 70, 0.201 90, 0.167 13) |

Fig. 2
Workflow of vision-based safflower recognition and localization system
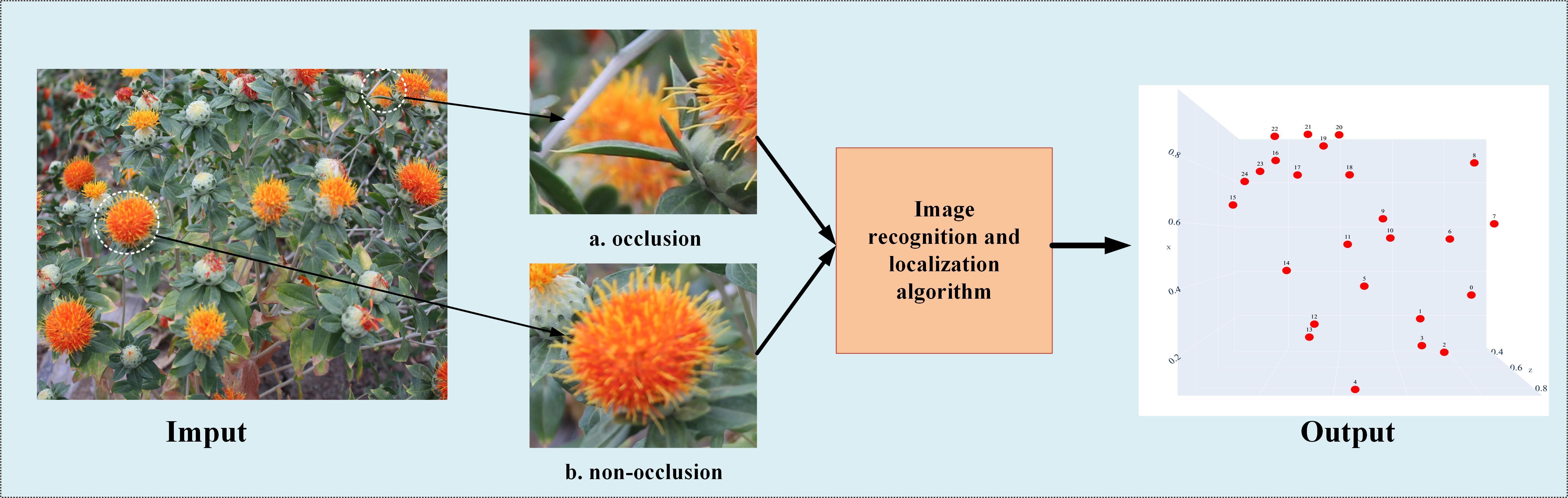
Table 2
Spatial distribution and 3D coordinates of 31 safflower targets
| Spatial distribution | Label | Coordinate points | Label | Coordinate points |
|---|---|---|---|---|
| | 1 | (0.031 29, 0.153 36, 0.352 20) | 17 | (0.670 69, 0.953 60, 0.498 40) |
| 2 | (0.195 88, 0.113 25, 0.634 10) | 18 | (0.676 65, 0.848 85, 0.684 30) | |
| 3 | (0.345 74, 0.266 43, 0.769 10) | 19 | (0.701 89, 0.865 28, 0.642 40) | |
| 4 | (0.417 69, 0.398 49, 0.586 40) | 20 | (0.797 98, 0.896 00, 0.891 50) | |
| 5 | (0.170 80, 0.548 25, 0.781 10) | 21 | (0.766 78, 0.708 47, 0.688 10) | |
| 6 | (0.273 79, 0.629 54, 0.697 40) | 22 | (0.812 71, 0.784 00, 0.581 70) | |
| 7 | (0.100 57, 0.739 19, 0.826 40) | 23 | (0.853 47, 0.841 81, 0.724 50) | |
| 8 | (0.024 39, 0.693 11, 0.597 60) | 24 | (0.944 39, 0.759 25, 0.573 90) | |
| 9 | (0.092 73, 0.861 65, 0.837 10) | 25 | (0.919 31, 0.683 73, 0.649 20) | |
| 10 | (0.051 98, 0.953 60, 0.887 40) | 26 | (0.968 68, 0.692 05, 0.637 40) | |
| 11 | (0.187 26, 0.958 50, 0.682 74) | 27 | (0.878 55, 0.613 11, 0.695 20) | |
| 12 | (0.264 38, 0.914 77, 0.599 40) | 28 | (0.852 53, 0.497 48, 0.673 30) | |
| 13 | (0.473 02, 0.967 90, 0.726 40) | 29 | (0.971 19, 0.255 98, 0.488 40) | |
| 14 | (0.527 73, 0.798 08, 0.822 40) | 30 | (0.812 71, 0.277 10, 0.683 30) | |
| 15 | (0.582 28, 0.953 60, 0.742 70) | 31 | (0.730 42, 0.069 73, 0.268 40) | |
| 16 | (0.599 52, 0.966 62, 0.705 60) |

Fig. 3
The process of modelling input to output of AC-RL-PrtNet

Table 4
Ablation results for hidden state dimension
| Hidden dim | Training time/s | Best path | Model size/MB |
|---|---|---|---|
| 64 | 1 672 | 11.856 | 4.251 |
| 128 | 1 998 | 11.414 | 4.462 |
| 256 | 2 920 | 11.186 | 5.282 |

Fig. 4
An interactive actor-critic decision framework for 3D safflower picking tasks
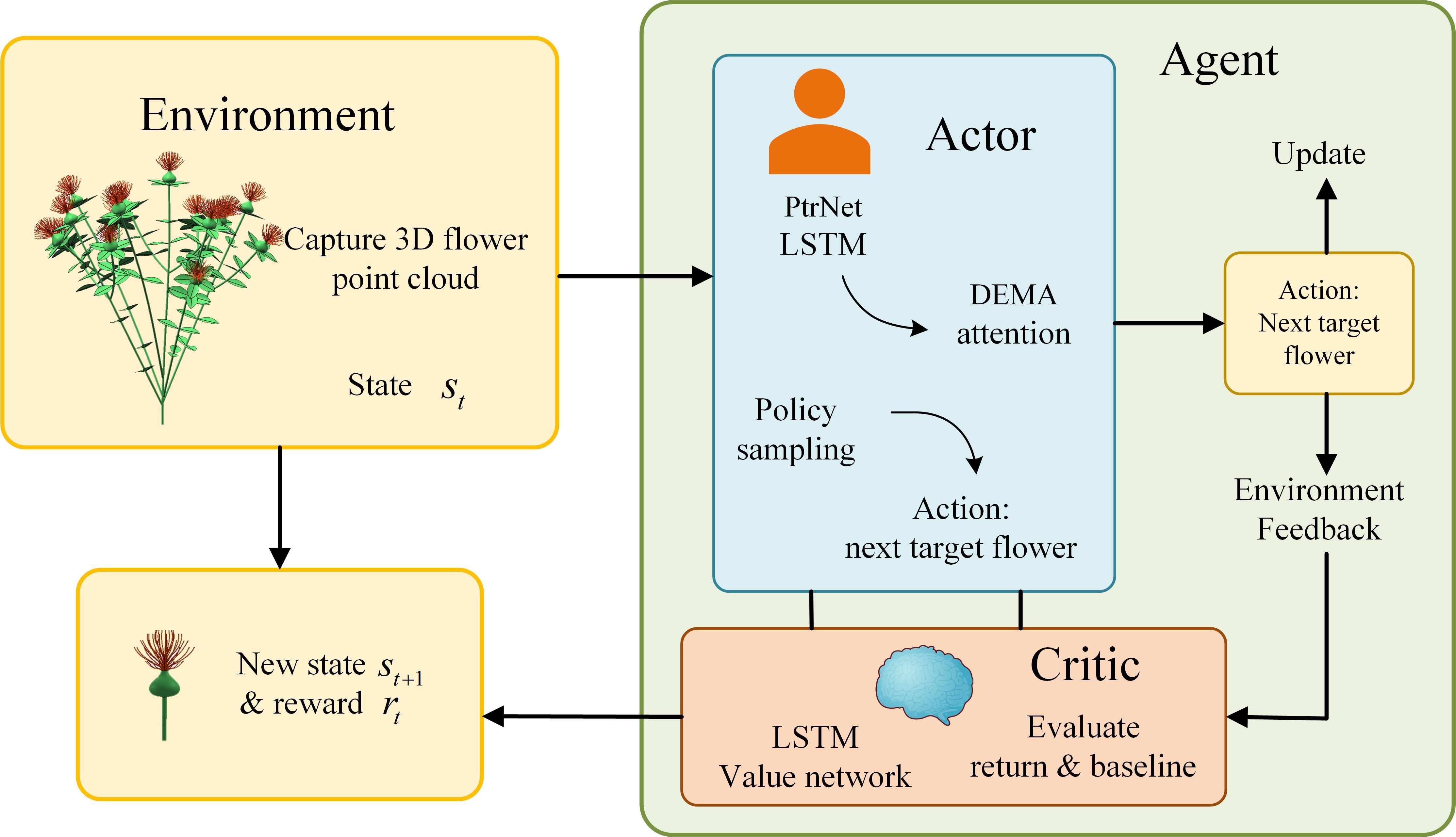
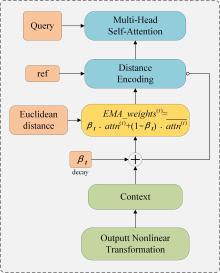
Fig. 5
Computational flow of the DEMA attention mechanism
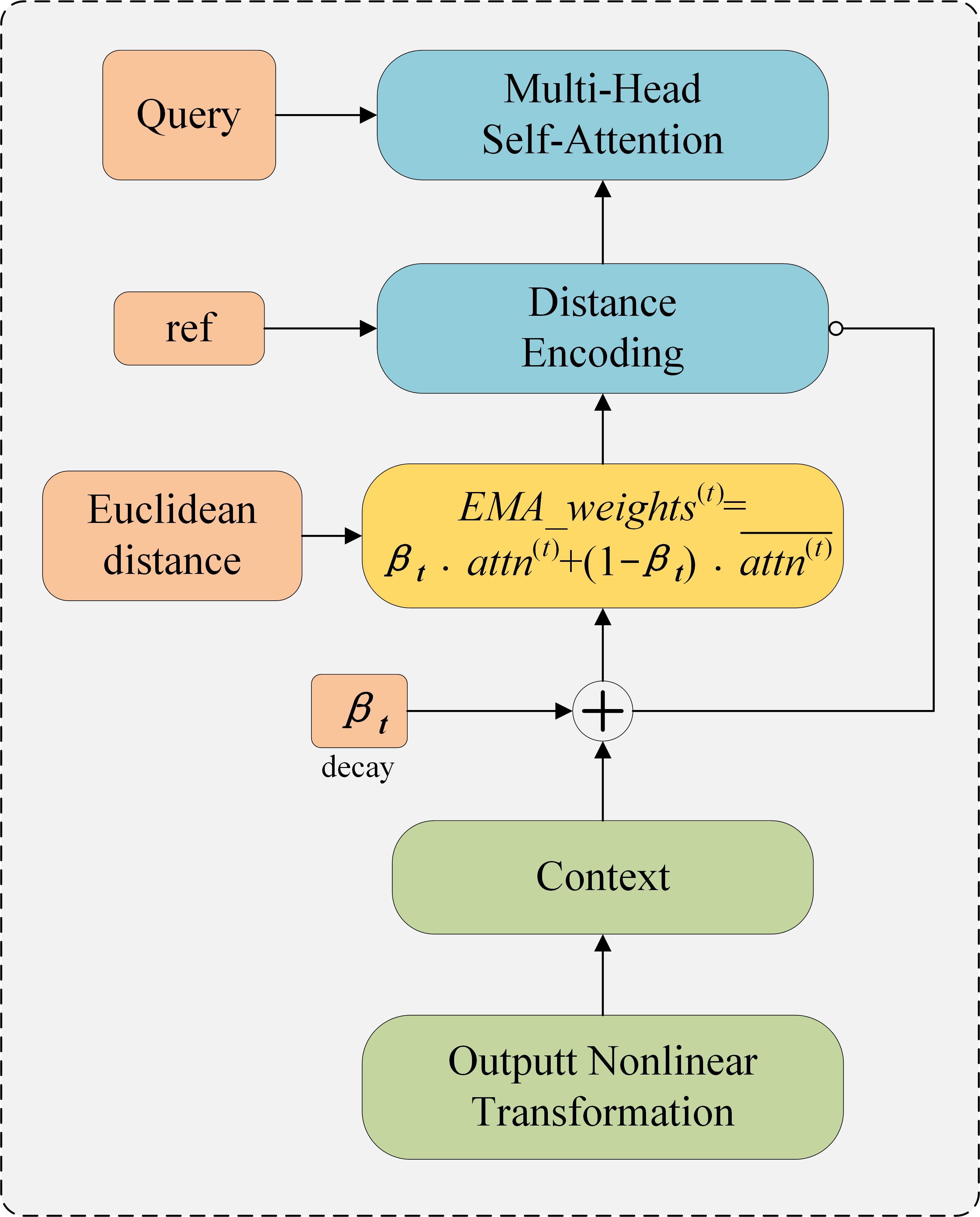
Fig. 6
Iterative convergence comparison of various attention mechanisms against the baseline
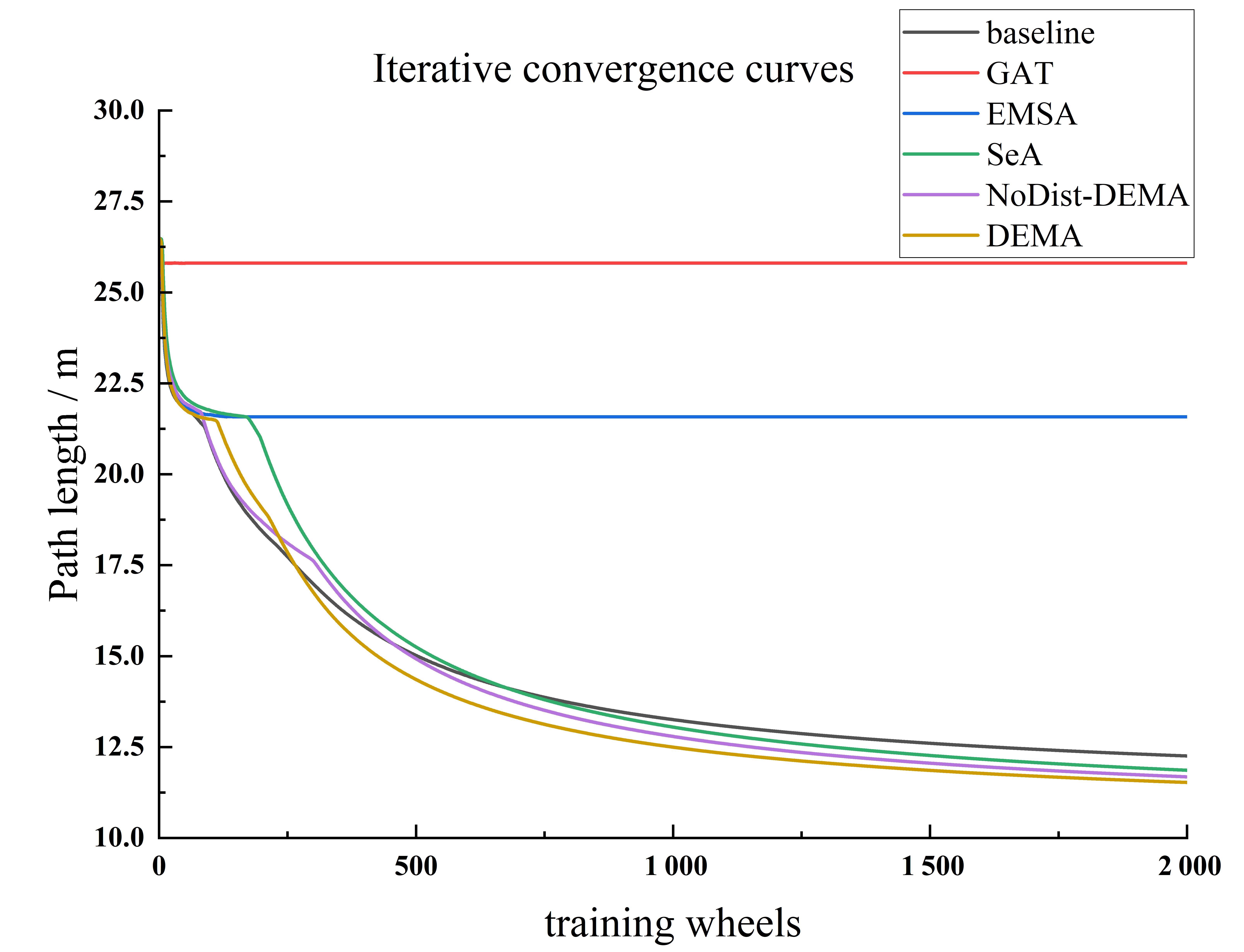
Table 5
Comparison of results of different architectures under various numbers of safflower points
| Method | n=20 | n=28 | n=37 | n=46 | ||||
|---|---|---|---|---|---|---|---|---|
| Length/cm | Time/s | Length/cm | Time/s | Length/cm | Time/s | Length/cm | Time/s | |
| baseline | 6.769 | 90.83 | 8.524 | 183.26 | 10.299 | 368.36 | 11.806 | 511.05 |
| GAT | 7.399 | 98.46 | 12.064 | 197.85 | 16.638 | 414.79 | 23.665 | 602.34 |
| EMSA | 8.321 | 126.12 | 11.992 | 254.96 | 15.251 | 496.07 | 19.019 | 582.41 |
| SeA | 6.675 | 63.07 | 8.404 | 185.84 | 9.940 | 327.68 | 11.433 | 510.73 |
| NoDist-DEMA | 6.719 | 59.32 | 8.346 | 123.94 | 10.145 | 231.76 | 11.402 | 304.78 |
| DEMA | 6.674 | 51.01 | 8.302 | 113.74 | 10.058 | 224.29 | 11.398 | 334.62 |
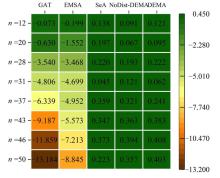
Fig. 7
Path length gap of different models at different test points
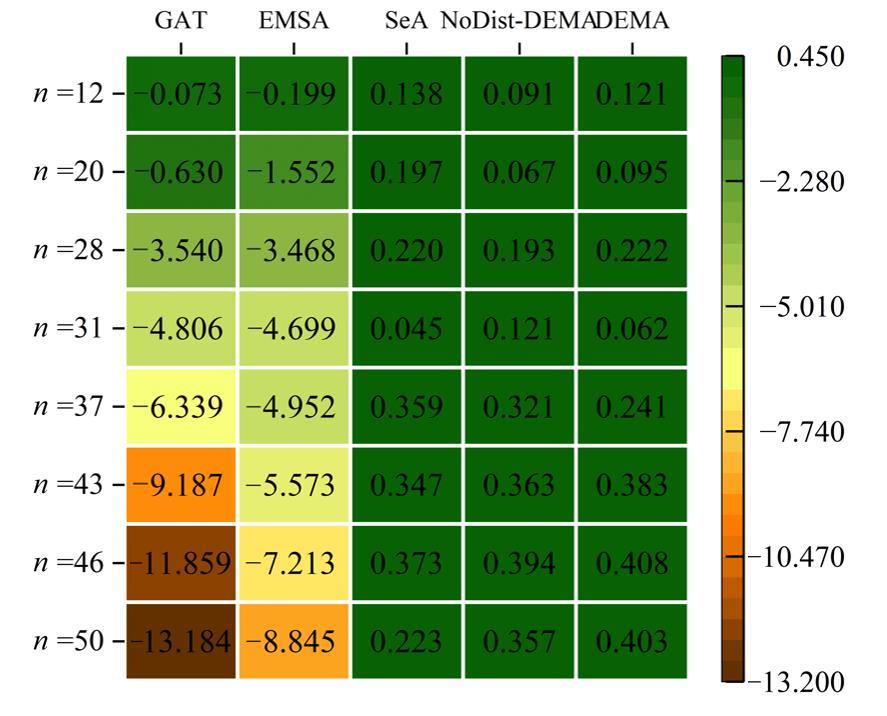
Table 6
Comparison of results for different pruning strategies of the proposed model
| Strategy | Encoder pruning | Decoder pruning | Params | Sparsity/% | Training time/s | Speedup/% | |||
|---|---|---|---|---|---|---|---|---|---|
| Input gate | Output gate | Input gate | Output gate | Initial (×105) | Modified (×105) | ||||
| Group A | 0.35 | 0.35 | 0.35 | 0.35 | 4.462 | 4.106 | 8 | 161 | — |
| Group B | 0.25 | 0.25 | 0.25 | 0.25 | 4.265 | 4.44 | 1 747 | 12 | |
| Group C | 0.35 | 0.35 | 0.25 | 0.25 | 4.201 | 5.88 | 1 698 | 15 | |
Table 7
Ablation study on model enhancements
| baseline | DEMA | Pruning | The enhanced critic | n=25 | n=31 | n=43 | |||
|---|---|---|---|---|---|---|---|---|---|
| Length/cm | Time/s | Length/cm | Time/s | Length/cm | Time/s | ||||
| √ | × | × | × | 6.674 | 88.08 | 6.749 | 167.35 | 11.426 | 497.50 |
| × | √ | × | × | 5.930 | 80.86 | 6.647 | 127.00 | 11.049 | 262.47 |
| × | √ | √ | × | 5.907 | 63.00 | 6.441 | 125.00 | 11.043 | 244.27 |
| × | √ | √ | √ | 5.826 | 69.79 | 6.356 | 94.90 | 10.784 | 244.50 |
Table 8
Comparison of the proposed AC-RL-PtrNet model with traditional algorithms
| Method | n=25 | n=31 | ||||||
|---|---|---|---|---|---|---|---|---|
| Length/cm (p-value) | Improvement rate/% | Time/s | Improvement rate/% | Length/cm (p-value) | Improvement rate/% | Time/s | Improvement rate/% | |
| Baseline | 6.084 (p<0.008 0) | 4.24 | 82.00 | 14.85 | 6.913 (p<0.005 0) | 8.07 | 215.00 | 55.86 |
| PSO | 15.123 (p<0.001 0) | 61.47 | 183.00 | 61.87 | 15.438 (p<0.001 0) | 58.82 | 232.00 | 59.10 |
| ACO | 7.090 (p<0.001 0) | 17.84 | 104.00 | 32.91 | 6.966 (p<0.001 0) | 8.75 | 123.00 | 22.93 |
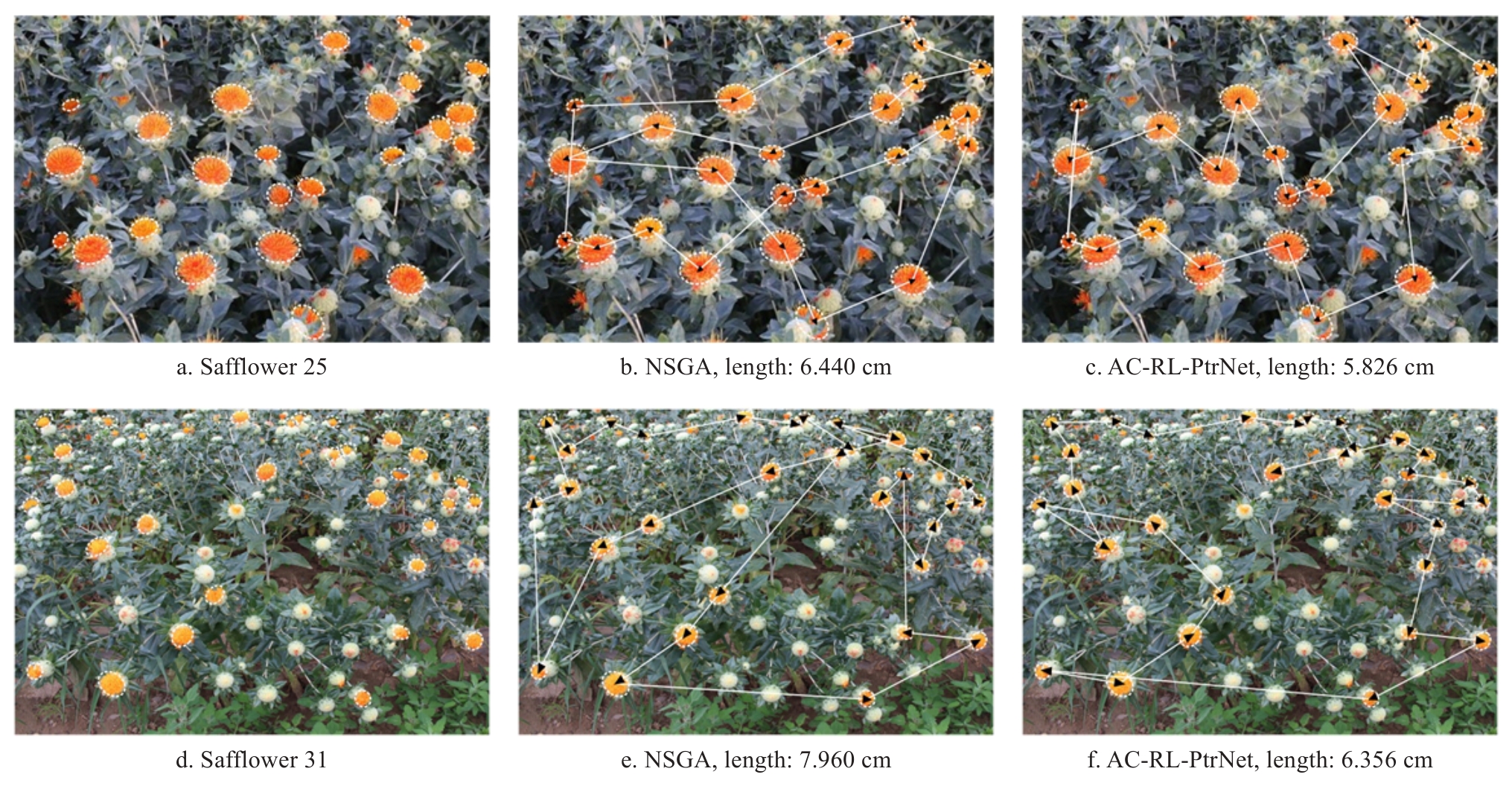
| NSGA | 6.440 (p<0.003 6) | 9.56 | 68.00 | -2.63 | 7.960 (p<0.001 0) | 20.17 | 135.00 | 29.70 |
| AC-RL-PtrNet | 5.826 | — | 69.79 | — | 6.356 | — | 94.90 | — |

Fig. 8
Field experiment setup and example planning results for 25 and 31 safflower blossoms

Table 9
Comparison of path and time efficiency of AC-RL-PtrNet and NSGA in two fields picking scenarios
| Scenario | Number | Variety | Path saving/% | Time saving/% |
|---|---|---|---|---|
| 25 safflower scenario | 25 | Yuhong No.1 | 11.52 | 5.43 |
| 31 safflower scenario | 31 | Yunhong No.5 | 20.17 | 29.70 |

Fig. 9
Comparison of safflower picking sequence planning on 25 and 31 flowers
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [1] | ZHAO Licheng, LU Xinyu, WU Qian, REN Ni, ZHOU Lingli, CHENG Yawen, HU Anqi, QI Chao. An Improved YOLOv10-Based Tomato Ripeness Detection Algorithm with LAMP Channel Pruning [J]. Smart Agriculture, 2026, 8(2): 133-146. |
| [2] | CHEN Ruotong, LIU Jifang, ZHANG Zhiyong, MA Nan, WEI Peigang, WANG Yi, YANG Yantao. Intelligent Inspection Path Planning Algorithm for Large-Scale Cattle Farms [J]. Smart Agriculture, 2026, 8(1): 178-191. |
| [3] | LU Zaiwang, ZHANG Yucheng, MA Yike, DAI Feng, DONG Jie, WANG Peng, LU Huixian, LI Tongbin, ZHAO Kaibin. Progress and Prospects of Research on Key Technologies for Agricultural Multi-Robot Full Coverage Operations [J]. Smart Agriculture, 2025, 7(5): 17-36. |
| [4] | WEI Peigang, CAO Shanshan, LIU Jifang, LIU Zhenhu, SUN Wei, KONG Fantao. Embodied Intelligent Agricultural Robots: Key Technologies, Application Analysis, Challenges and Prospects [J]. Smart Agriculture, 2025, 7(4): 141-158. |
| [5] | LIU Long, WANG Ning, WANG Jiacheng, CAO Yuheng, ZHANG Kai, KANG Feng, WANG Yaxiong. Pruning Point Recognition and Localization for Spindle-Shaped Apple Trees During Dormant Season Using an Improved U-Net Model [J]. Smart Agriculture, 2025, 7(3): 120-130. |
| [6] | YU Zhongyi, WANG Hongyu, HE Xiongkui, ZHAO Lei, WANG Yuanyuan, SUN Hai. Key Technologies and Prospects of Laser Weeding Robots [J]. Smart Agriculture, 2025, 7(2): 132-145. |
| [7] | MA Nan, CAO Shanshan, BAI Tao, KONG Fantao, SUN Wei. Research Progress and Prospect of Multi-robot Collaborative SLAM in Complex Agricultural Scenarios [J]. Smart Agriculture, 2024, 6(6): 23-43. |
| [8] | CHEN Mingyou, LUO Lufeng, LIU Wei, WEI Huiling, WANG Jinhai, LU Qinghua, LUO Shaoming. Orchard-Wide Visual Perception and Autonomous Operation of Fruit Picking Robots: A Review [J]. Smart Agriculture, 2024, 6(5): 20-39. |
| [9] | HE Yong, HUANG Zhenyu, YANG Ningyuan, LI Xiyao, WANG Yuwei, FENG Xuping. Research Progress and Prospects of Key Navigation Technologies for Facility Agricultural Robots [J]. Smart Agriculture, 2024, 6(5): 1-19. |
| [10] | FAN Mingshuo, ZHOU Ping, LI Miao, LI Hualong, LIU Xianwang, MA Zhirun. Automatic Navigation and Spraying Robot in Sheep Farm [J]. Smart Agriculture, 2024, 6(4): 103-115. |
| [11] | LIU Yang, JI Jie, PAN Deng, ZHAO Lijun, LI Mingsheng. Localization Method for Agricultural Robots Based on Fusion of LiDAR and IMU [J]. Smart Agriculture, 2024, 6(3): 94-106. |
| [12] | HE Qing, JI Jie, FENG Wei, ZHAO Lijun, ZHANG Bohan. Adaptive Time Horizon MPC Path Tracking Control Method for Mowing Robot [J]. Smart Agriculture, 2024, 6(3): 82-93. |
| [13] | ZHOU Longgang, LIU Ting, LU Jinzhu. Traversal Path Planning for Farmland in Hilly Areas Based on Floyd and Improved Genetic Algorithm [J]. Smart Agriculture, 2023, 5(4): 45-57. |
| [14] | XU Jishuang, JIAO Jun, LI Miao, LI Hualong, YANG Xuanjiang, LIU Xianwang, GUO Panpan, MA Zhirun. Path Planning and Motion Control Method for Sick and Dead Animal Transport Robots Integrating Improved A * Algorithm and Fuzzy PID [J]. Smart Agriculture, 2023, 5(4): 127-136. |
| [15] | CHEN Ruiyun, TIAN Wenbin, BAO Haibo, LI Duan, XIE Xinhao, ZHENG Yongjun, TAN Yu. Three-Dimensional Environment Perception Technology for Agricultural Wheeled Robots: A Review [J]. Smart Agriculture, 2023, 5(4): 16-32. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







