Smart Agriculture ›› 2026, Vol. 8 ›› Issue (2): 133-146.doi: 10.12133/j.smartag.SA202507045
• Information Processing and Decision Making • Previous Articles
ZHAO Licheng1,2, LU Xinyu2, WU Qian2, REN Ni2, ZHOU Lingli2, CHENG Yawen2, HU Anqi2, QI Chao2( )
)
Received:2025-07-30
Online:2026-03-30
Foundation items:National Natural Science Foundation of China(32201664); Jiangsu Provincial Agricultural Science and Technology Independent Innovation Fund(CX(24)1021); Special Pilot Program for the Integrated R&D, Manufacturing, Promotion and Application of Agricultural Machinery(JSYTH08)
About author:biography:ZHAO Licheng, E-mail: zhao_orange@163.com
corresponding author:
CLC Number:
ZHAO Licheng, LU Xinyu, WU Qian, REN Ni, ZHOU Lingli, CHENG Yawen, HU Anqi, QI Chao. An Improved YOLOv10-Based Tomato Ripeness Detection Algorithm with LAMP Channel Pruning[J]. Smart Agriculture, 2026, 8(2): 133-146.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202507045
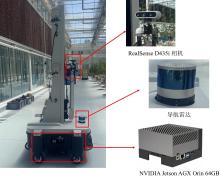
Fig. 1
On-site image of the mobile inspection robot
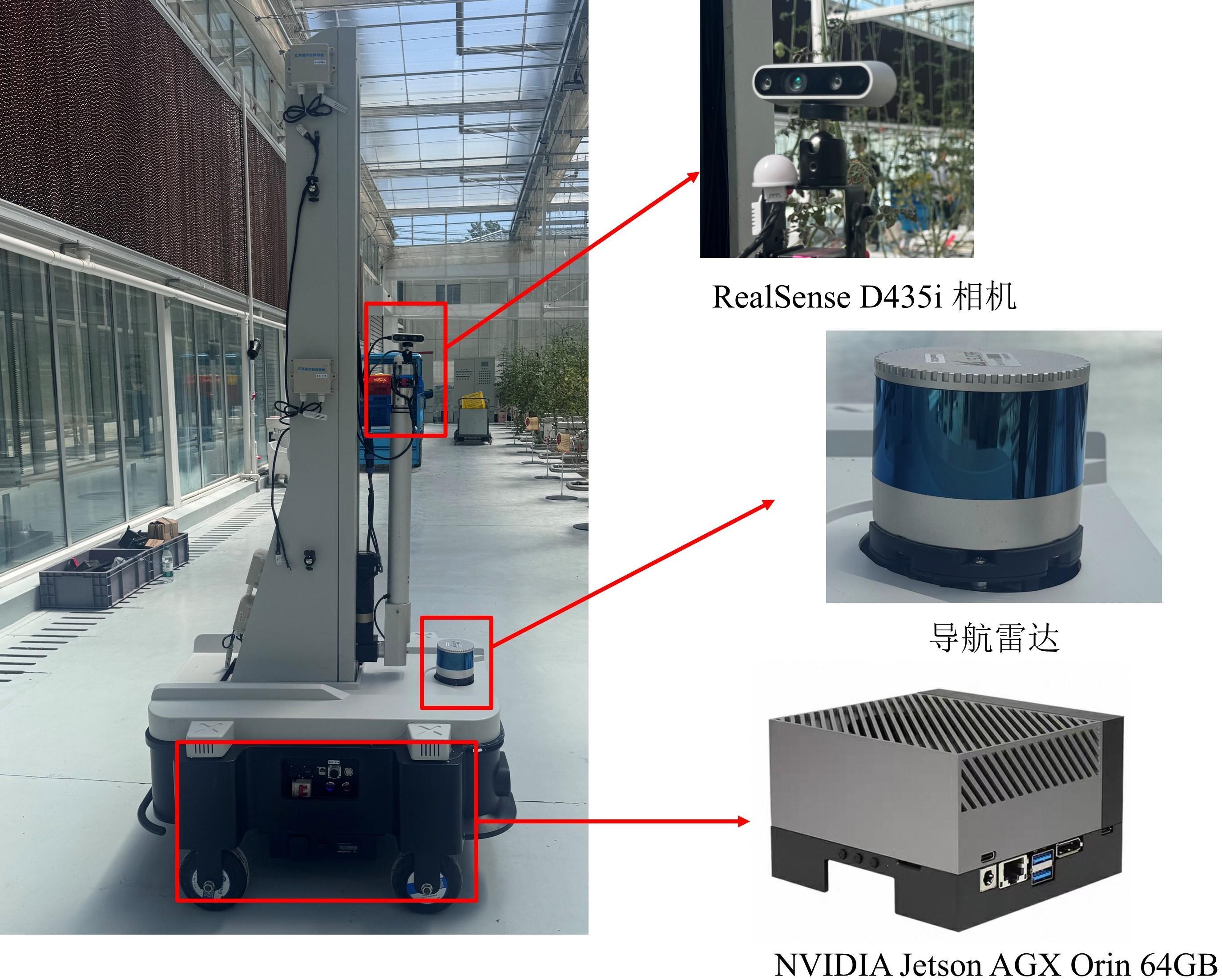
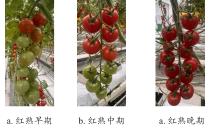
Fig. 2
Example images of cluster tomatoes at different maturity stages
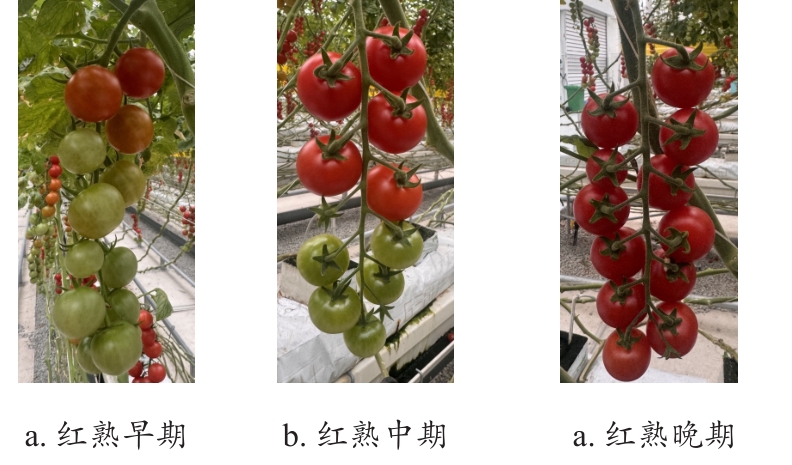
Table 1
Sample counts for three maturity stages of cluster tomatoes
| 成熟时期 | 训练集 | 验证集 | 测试集 | 总计(占比/%) |
|---|---|---|---|---|
| 红熟早期 | 93 | 841 | 148 | 1 082(32.07) |
| 红熟中期 | 104 | 934 | 166 | 1 204(35.07) |
| 红熟晚期 | 107 | 831 | 149 | 1 087(32.86) |

Fig. 3
Data augmentation examples for cluster tomato images
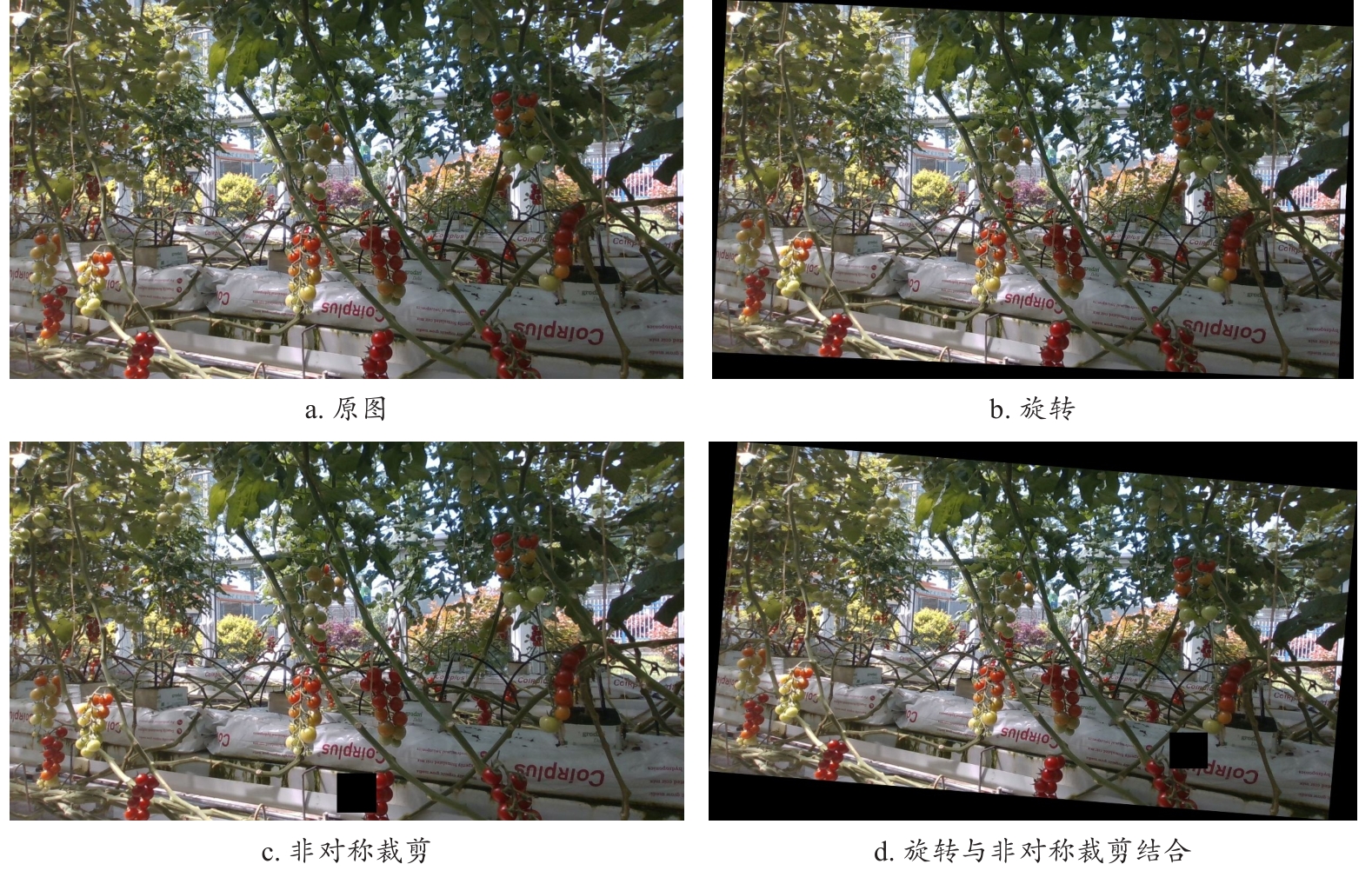
Fig. 4
Structure diagram of the proposed LampCT-YOLO model
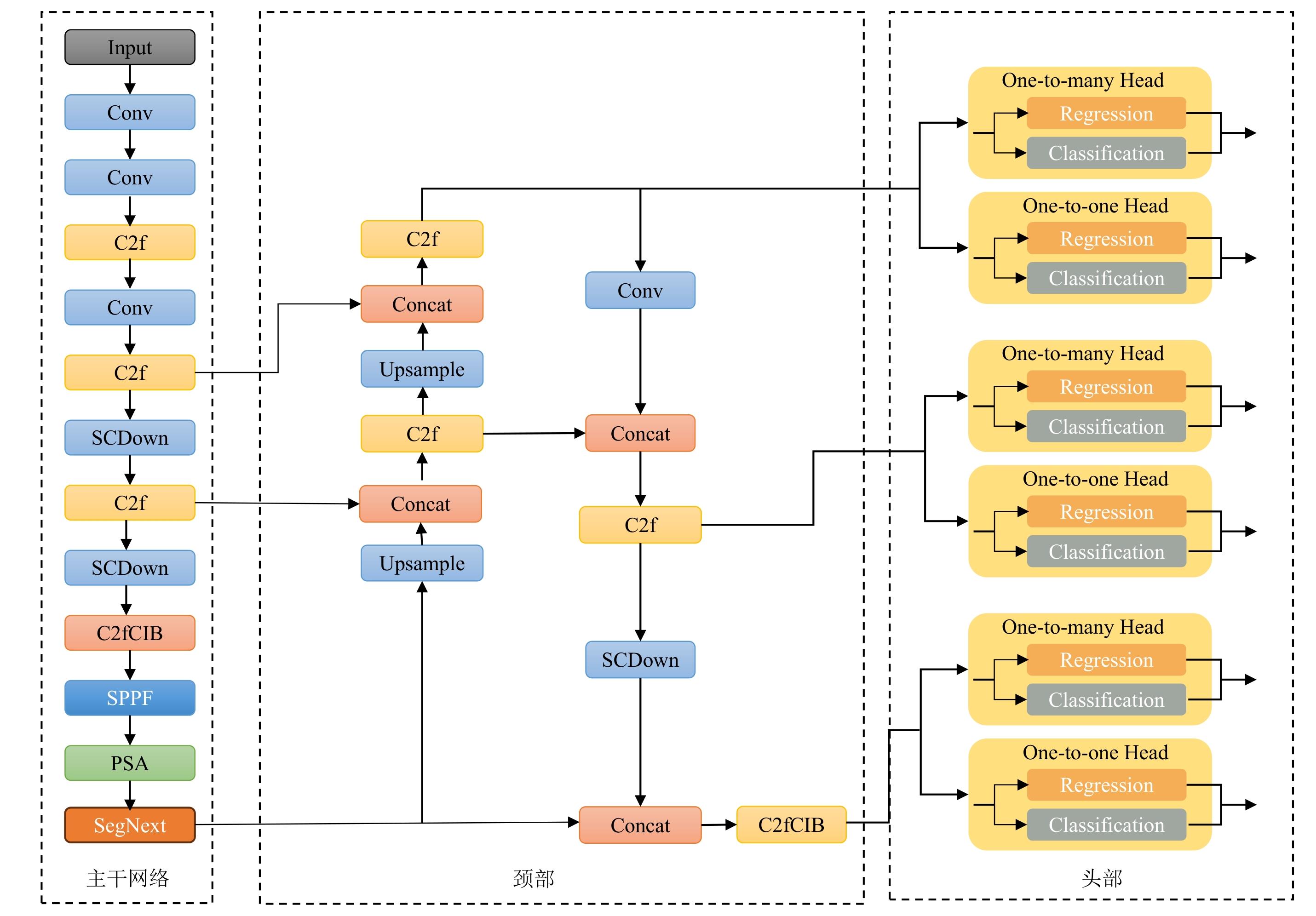
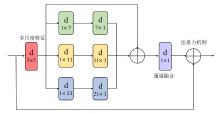
Fig. 5
Architecture diagram of SegNeXt attention mechanism network
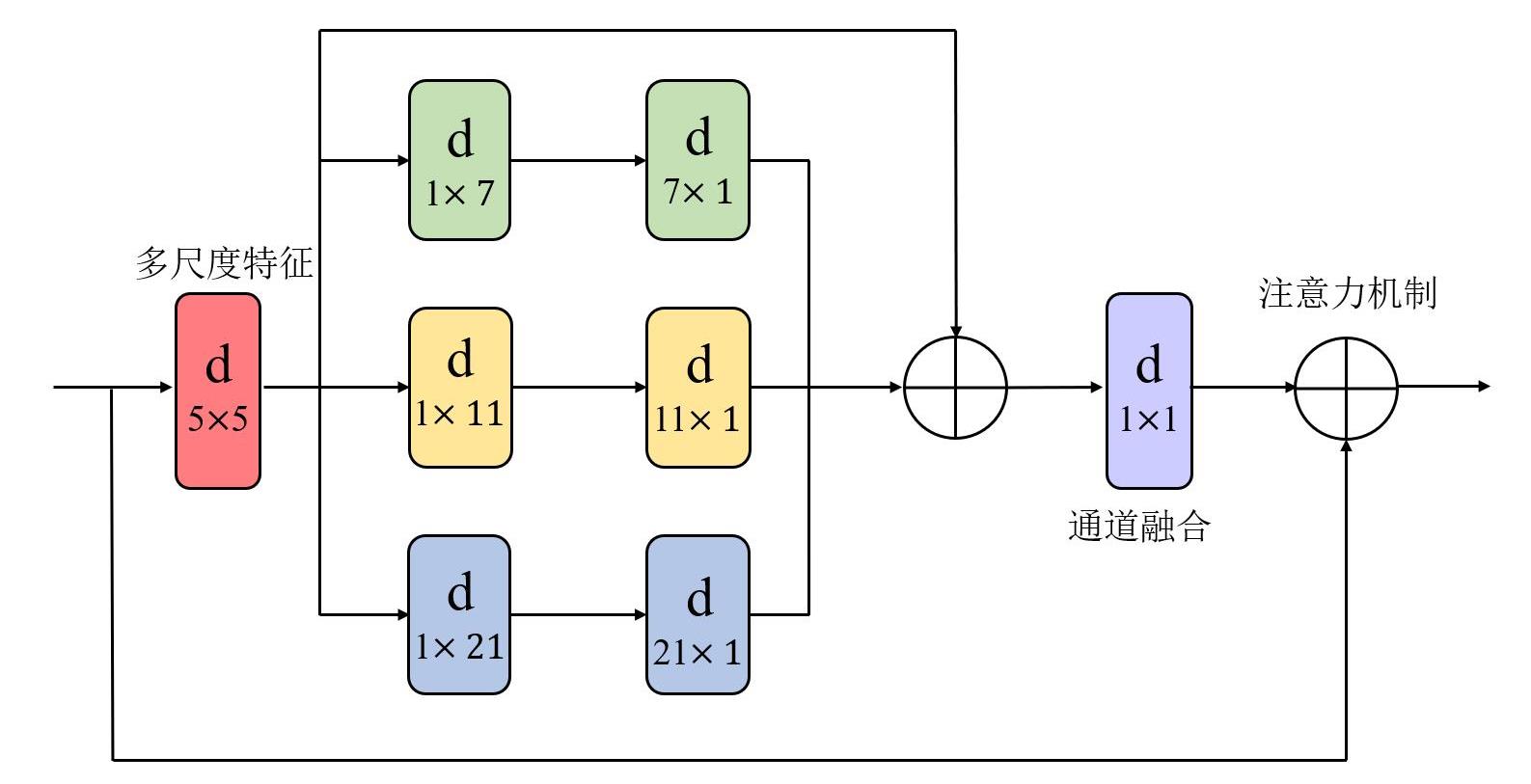

Fig. 6
Schematic diagram of LAMP channel pruning
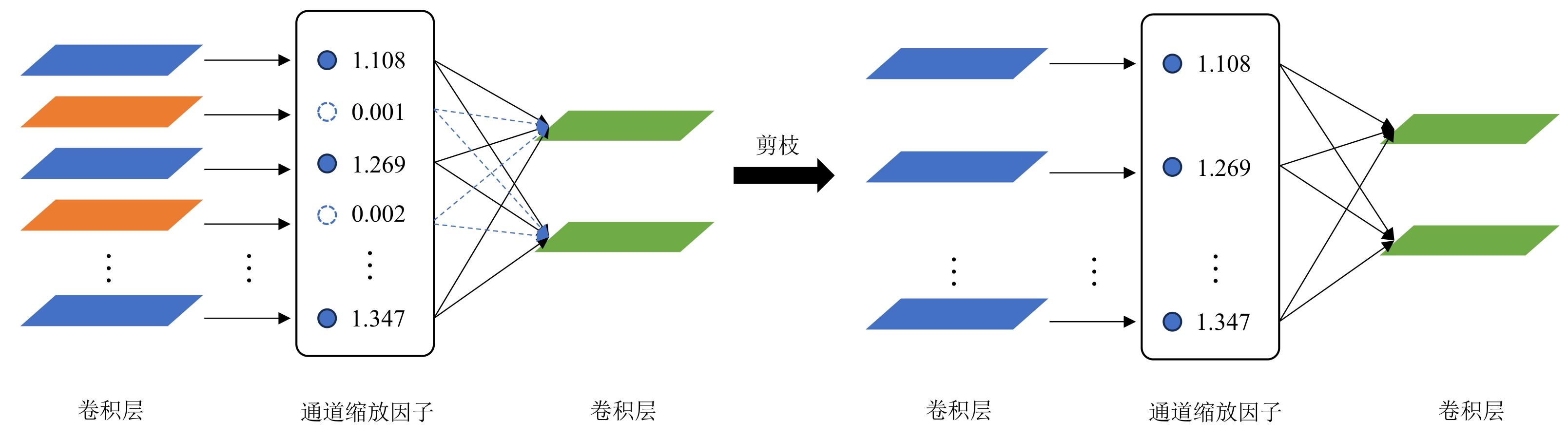
Table 2
Ablation experiment of SegNext attention mechanism for cluster tomato maturity detection
| 模型 | 红熟早期/% | 红熟中期/% | 红熟晚期/% | mAP50/% | FPS/(帧/s) | 计算量/GFLOPs | 参数量/MB | 权重文件大小/MB |
|---|---|---|---|---|---|---|---|---|
| YOLOv10 | 79.1 | 81.8 | 87.5 | 82.8 | 37.37 | 106.700 | 45.811 | 107.7 |
| YOLOv10+SegNeXt | 84.6(+5.5) | 89.5(+7.7) | 88.4(+0.9) | 87.5(+4.7) | 35.8(-1.57) | 228.765 | 53.522 | 107.6(-0.1) |
Table 3
Ablation experiment on the pruning of the lamp model
| 模型 | 红熟早期/% | 红熟中期/% | 红熟晚期/% | mAP50/% | FPS/(帧/s) | 计算量/GFLOPs | 参数量/MB | 权重文件大小/MB |
|---|---|---|---|---|---|---|---|---|
| YOLOv10+SegNeXt | 84.6 | 89.5 | 88.4 | 87.5 | 35.8 | 228.7 | 53.5 | 107.6 |
| YOLOv10+SegNeXt +DWConv | 75.4 (-9.2) | 75.0 (-14.5) | 82.2 (-6.2) | 77.5 (-10.0) | 37.7 (+1.9) | 115.2 (-113.5) | 21.1 (-32.4) | 52.2 (-55.5) |
| YOLOv10+SegNeXt +Lamp | 81.4 (-3.2) | 84.3 (-5.2) | 91.9 (+3.5) | 85.9 (-1.6) | 66.9 (+23.1) | 114.2 (-114.5) | 19.7 (-33.7) | 40.0 (-67.7) |
Fig. 7
Visual comparison of attention mechanism before and after optimization of LampCT-YOLO model
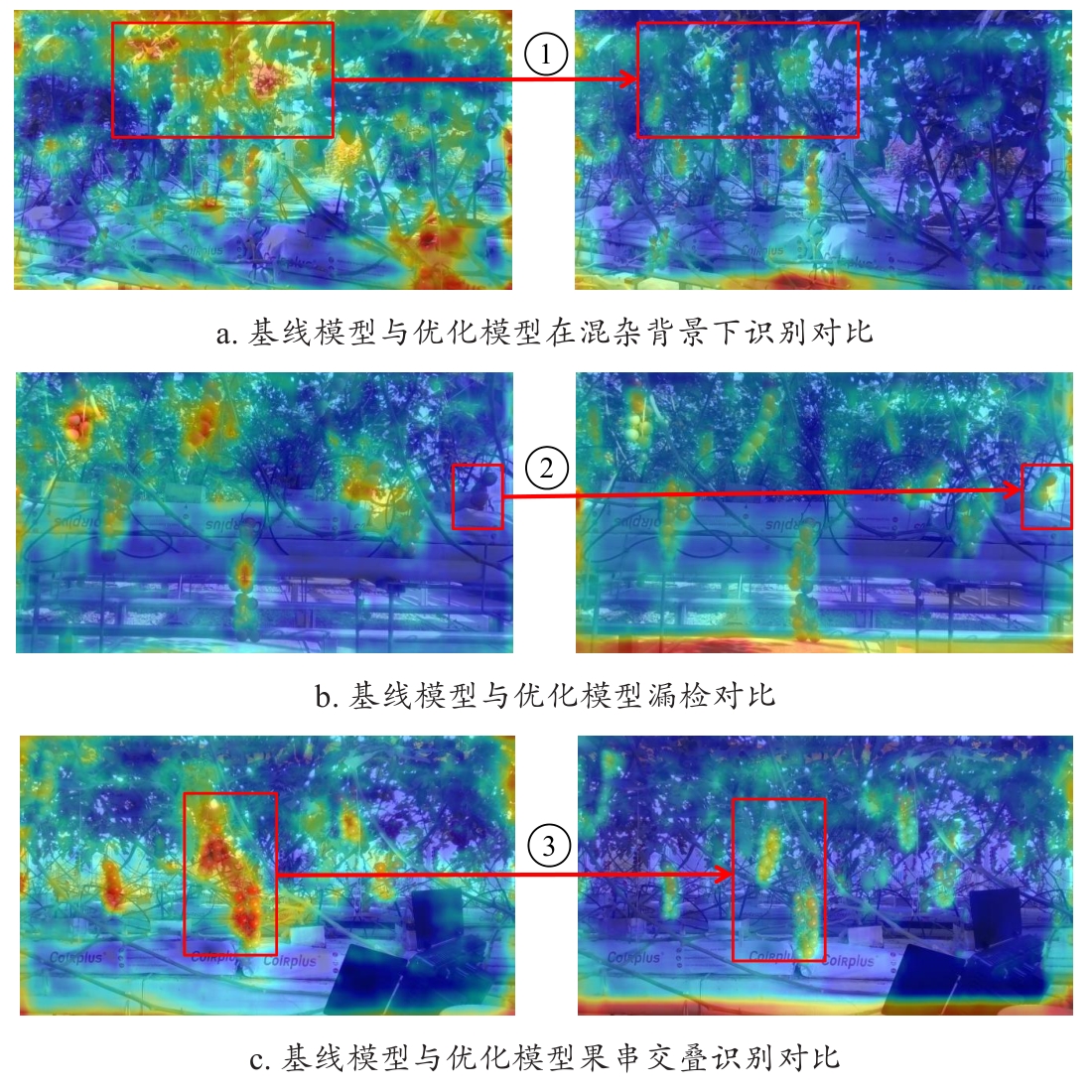
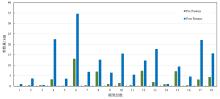
Fig. 8
Comparison chart of parameters of each layer of the LampCT-YOLO model before and after pruning
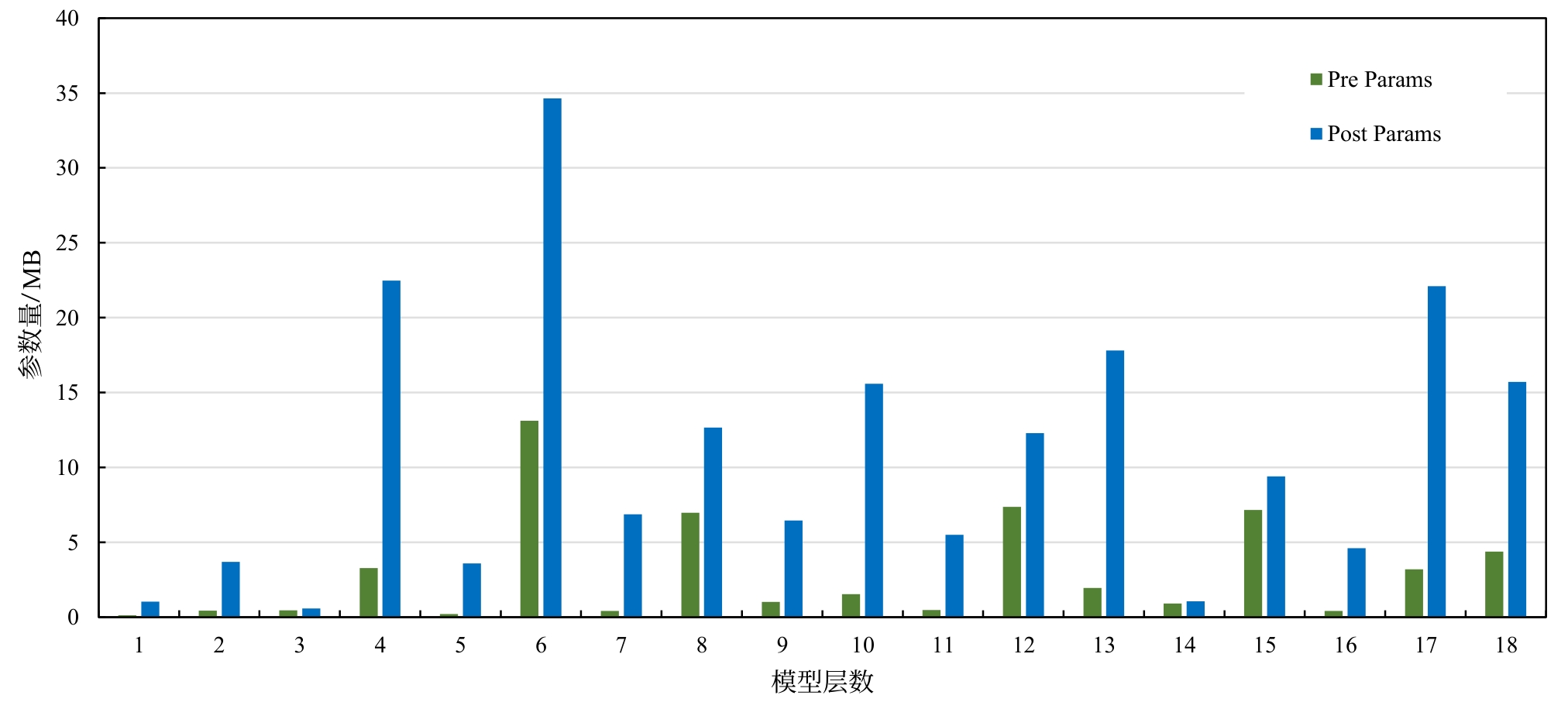
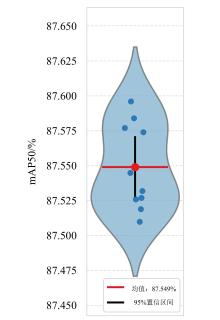
Fig. 9
Confidence interval and distribution violin plot of LampCT-YOLO model
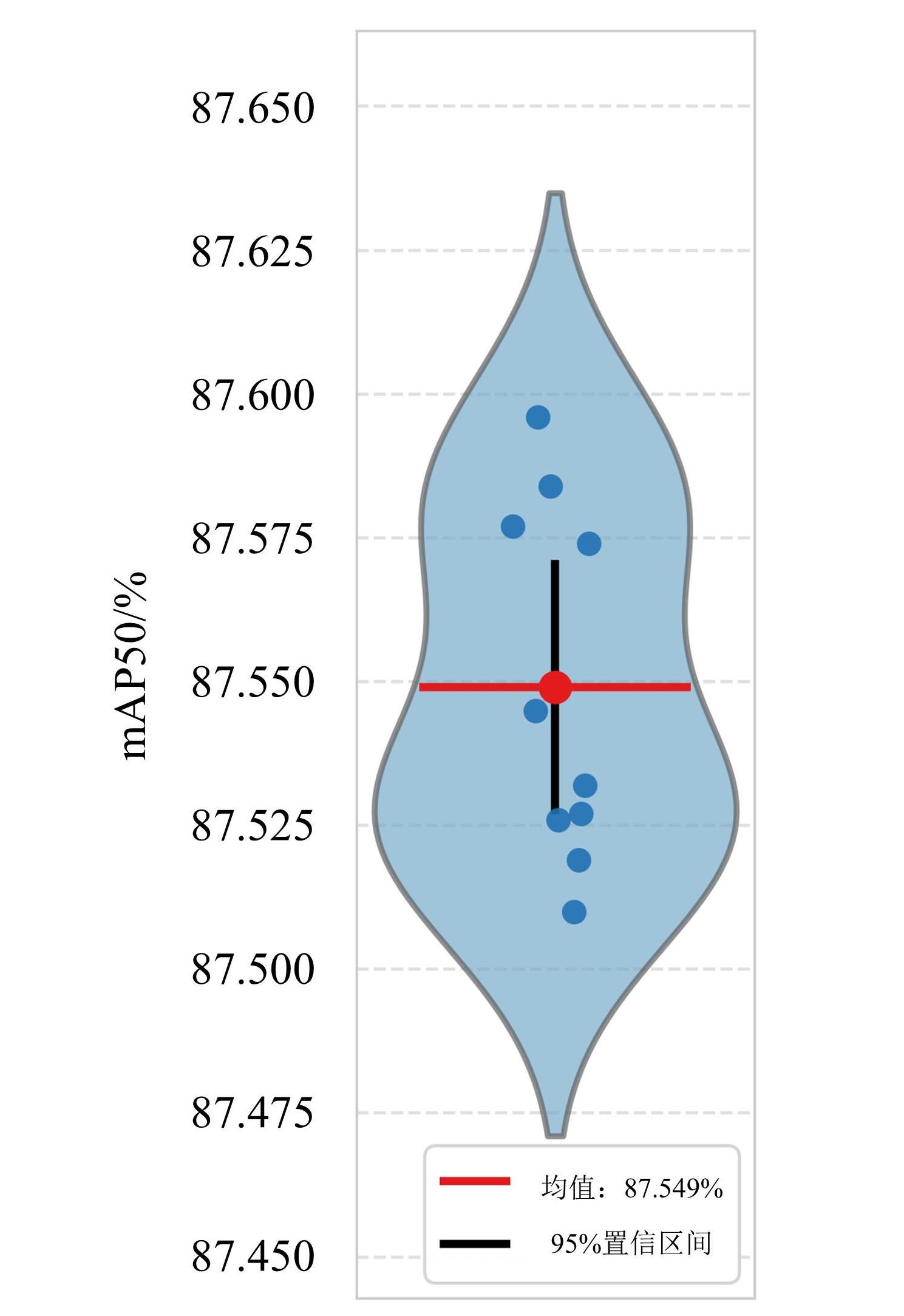
Table 4
Comparison of the attention-enhanced model with mainstream object detection models
| 模型名称 | mAP50/% | FPS/(帧/s) | 计算量/GFLOPs | 模型参数量/MB | 权重文件大小/MB |
|---|---|---|---|---|---|
| SSD | 77.3 | 43.22 | 37.8 | 21.472 | 91.6 |
| Faster RCNN | 80.7 | 15.75 | 177.3 | 115.684 | 108.3 |
| YOLOv7 | 76.0 | 48.25 | 51.6 | 36.490 | 71.3 |
| YOLO8n | 84.5 | 39.89 | 8.1 | 3.006 | 6.3 |
| YOLO8s | 84.0 | 43.82 | 28.4 | 11.127 | 22.5 |
| YOLO8m | 82.5 | 45.41 | 78.7 | 25.841 | 52.0 |
| YOLO8l | 83.6 | 39.91 | 164.8 | 43.609 | 87.7 |
| YOLO8x | 82.4 | 37.54 | 257.4 | 68.126 | 136.7 |
| YOLOv10n | 82.8 | 43.57 | 6.0 | 2.207 | 5.6 |
| YOLOv10s | 81.9 | 44.49 | 21.4 | 7.219 | 16.5 |
| YOLOv10m | 82.5 | 44.57 | 58.9 | 15.315 | 33.5 |
| YOLOv10l | 82.6 | 37.37 | 228.7 | 53.522 | 107.7 |
| YOLOv10x | 79.0 | 41.60 | 160.0 | 29.399 | 130.4 |
| YOLOv11n | 85.9 | 43.99 | 6.3 | 2.583 | 5.5 |
| YOLOv11s | 85.3 | 43.12 | 21.3 | 9.414 | 19.2 |
| YOLOv11m | 85.3 | 37.89 | 67.7 | 20.032 | 40.5 |
| YOLOv11l | 85.9 | 37.15 | 194.4 | 56.830 | 114.4 |
| YOLOv11x | 84.0 | 37.21 | 194.4 | 58.362 | 114.4 |
| YOLOv12n | 84.1 | 39.71 | 5.8 | 2.509 | 11.2 |
| YOLOv12s | 82.0 | 40.57 | 19.3 | 9.074 | 18.6 |
| YOLOv12m | 84.6 | 41.98 | 59.5 | 17.579 | 39.7 |
| YOLOv12l | 79.9 | 36.23 | 82.1 | 26.396 | 53.7 |
| YOLOv12x | 81.3 | 33.39 | 184.1 | 59.248 | 119.5 |
| YOLOv10 l + SegNeXt | 87.5 | 66.20 | 114.2 | 19.765 | 40.0 |
Table 5
Detection performance analysis of different YOLOv10 models with SegNeXt and Lamp modules
| 模型名称 | mAP50/% | FPS/(帧/s) | 计算量/GFLOPs | 模型参数量/MB | 权重文件大小/MB |
|---|---|---|---|---|---|
| YOLOv10n | 82.8 | 43.57 | 6.000 | 2.207 | 5.6 |
| YOLOv10n+ SegNeXt | 85.5 | 41.50 | 8.600 | 2.450 | 6.3 |
| YOLOv10n+ SegNeXt+Lamp | 84.8 | 51.20 | 6.500 | 2.000 | 5.1 |
| YOLOv10l | 82.6 | 37.37 | 106.700 | 45.811 | 107.7 |
| YOLOv10 l + SegNeXt | 87.5 | 35.80 | 228.765 | 53.522 | 107.6 |
| YOLOv10l+ SegNeXt+Lamp | 85.9 | 66.90 | 114.252 | 19.765 | 40.0 |
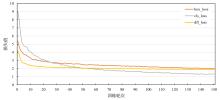
Fig.10
Training loss convergencecurve of the LampCT-YOLO model
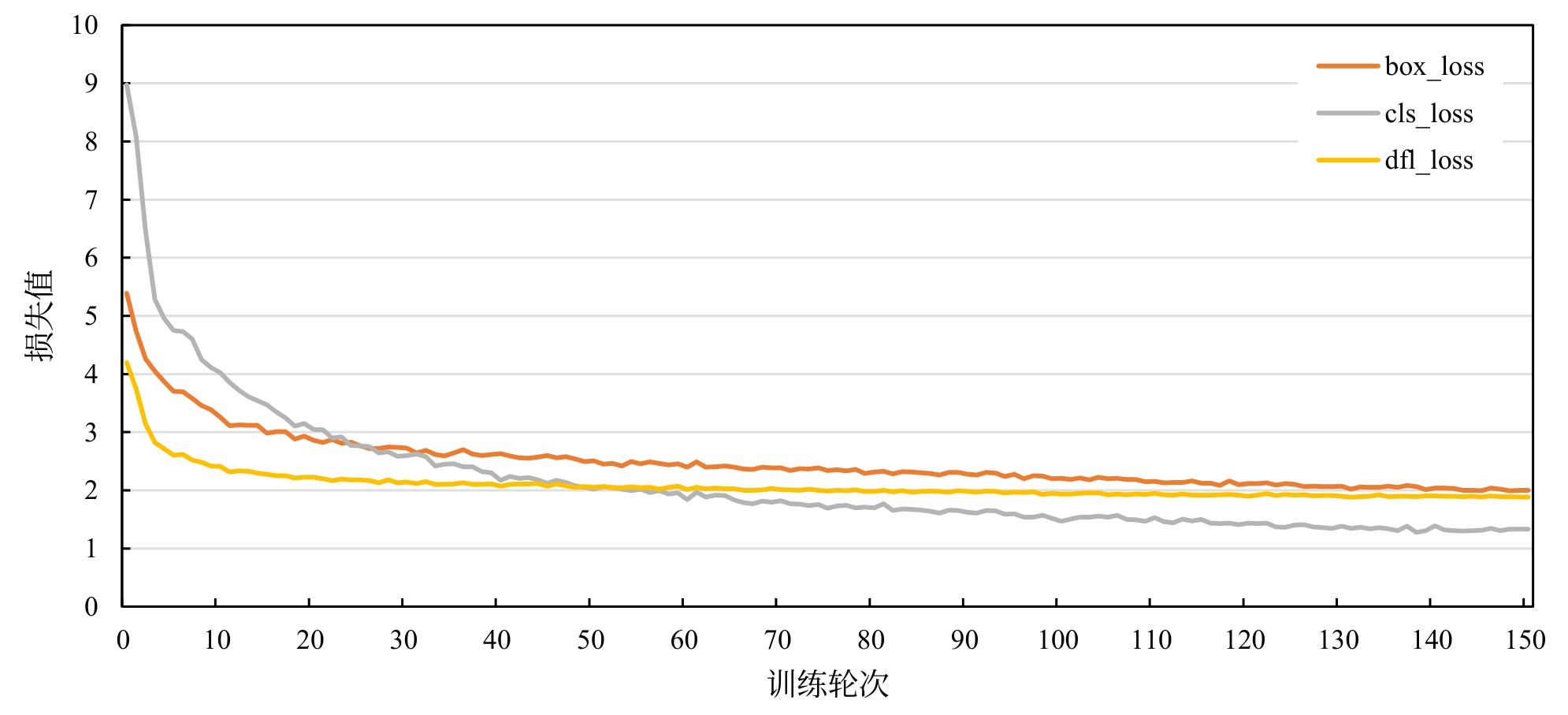

Fig. 11
Example images of cluster tomato detection under complex conditions
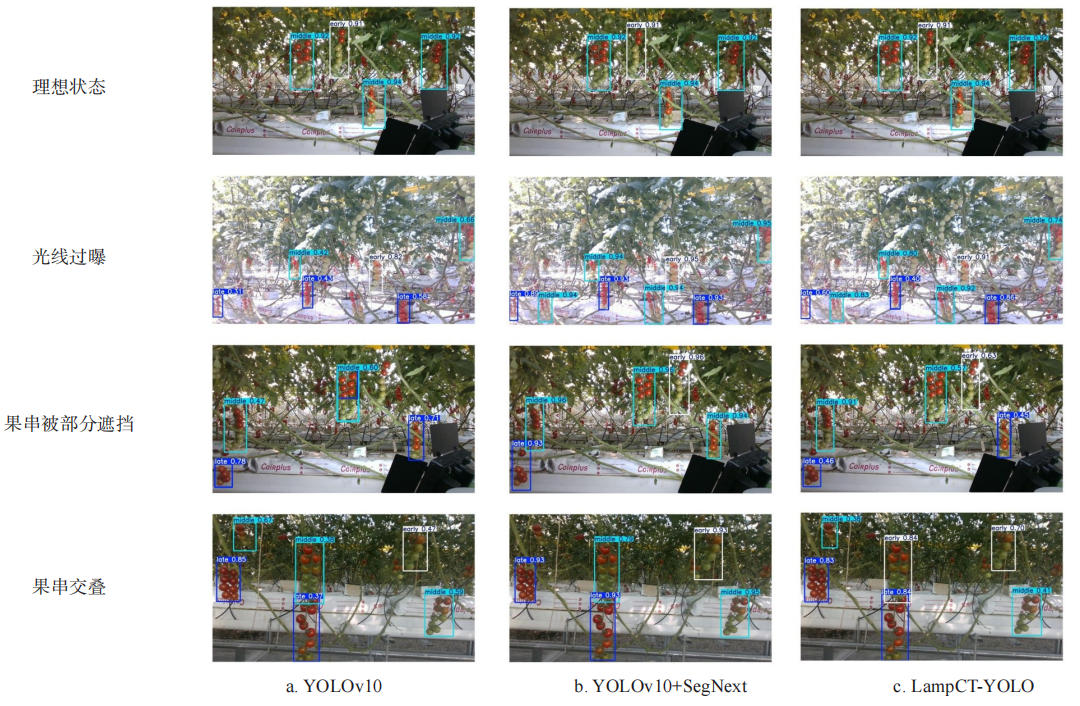

Fig. 12
On-site operation diagram of intelligent inspection equipment
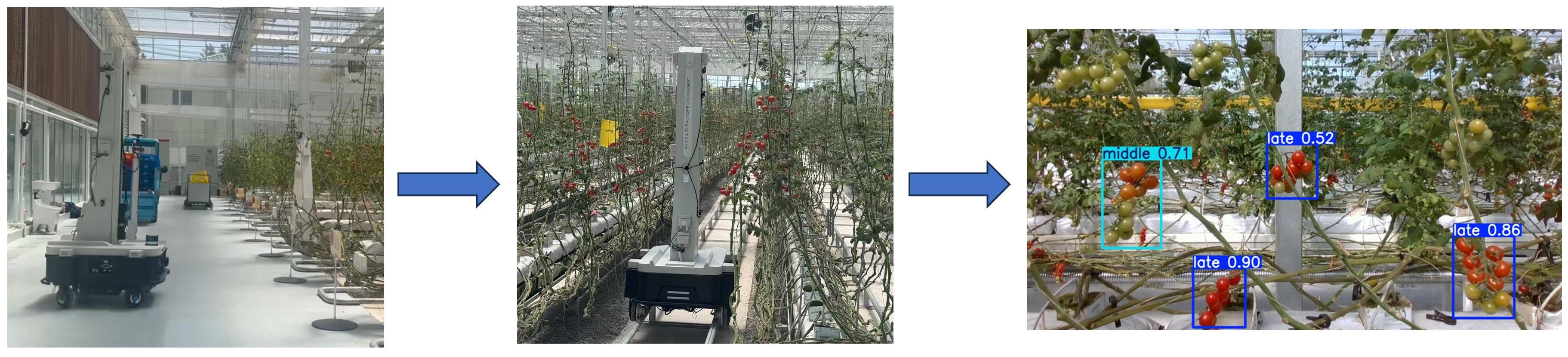
Table 6
Comparison between mobile device detection results of the LampCT-YOLO model and manual counts
| 红熟早期/串 | 红熟中期/串 | 红熟晚期/串 | 误检/串 | 漏检/串 | |
|---|---|---|---|---|---|
| 人工计数 | 92 | 70 | 294 | 0 | 0 |
| 设备检测 | 78 | 61 | 248 | 22 | 47 |
| [1] |
汉永乾, 孙步功, 张鹏, 等. 农业采摘机器人研究进展[J]. 林业机械与木工设备, 2023, 51(4): 4-8.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
张东彦, 高玥, 程涛, 等. 基于YOLOv8-FECA的密集场景下小麦赤霉病孢子目标检测[J]. 农业工程学报, 2024, 40(21): 127-136.
|
|
|
|
| [5] |
张勤, 陈建敏, 李彬, 等. 基于RGB-D信息融合和目标检测的番茄串采摘点识别定位方法[J]. 农业工程学报, 2021, 37(18): 143-152.
|
|
|
|
| [6] |
毕智健, 张若宇, 齐妍杰, 等. 基于机器视觉的番茄成熟度颜色判别[J]. 食品与机械, 2016, 32(12): 133-136.
|
|
|
|
| [7] |
|
| [8] |
王俊平,徐刚.机器视觉和电子鼻融合的番茄成熟度检测方法[J].食品与机械,2022,38(2):148-152.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
中华全国供销合作社. 中华人民共和国供销合作行业标准: GH/T 1193-2021 [S]. 北京: 中华全国供销合作社, 2021.
|
|
All China Supply and Marketing Cooperatives. Supply and Marketing Cooperation Industry Standard of the People's Republic of China: GH/T 1193-2021 [S]. Beijing: All China Supply and Marketing Cooperatives, 2021
|
|
| [13] |
王新, 唐灿, 朱建新, 等. 基于深度增强与特征抗噪的夜间串番茄成熟度识别方法[J]. 农业机械学报, 2025, 56(4): 363-374.
|
|
|
|
| [14] |
SA I,
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
WOO S,
|
| [20] |
|
| [21] |
KC K,
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
姚晓通, 曲绍业. 基于改进YOLOv12s的辣椒叶片病虫害轻量化检测方法[J]. 智慧农业(中英文), 2026, 8(1): 1-14.
|
|
|
| [1] | WU Chenxu, ZUO Haolong, LI Gang. Cross-Modal Attention for Multi-Source Remote Sensing Crop Classification under Cloud Occlusion and Complex Field Scenarios [J]. Smart Agriculture, 2026, 8(2): 118-132. |
| [2] | HUANG Xianguo, ZHU Qibing, HUANG Min. Online Detection System for Freshness of Fruits and Vegetables Based on Temporal Multi-source Information Fusion [J]. Smart Agriculture, 2026, 8(1): 203-212. |
| [3] | HU Yumeng, GUAN Feifan, XIE Dongchen, MA Ping, YU Youben, ZHOU Jie, NIE Yanming, HUANG Lüwen. Tea Leaf Disease Diagnosis Based on Improved Lightweight U-Net3+ [J]. Smart Agriculture, 2026, 8(1): 15-27. |
| [4] | CAI Yuqin, LIU Daming, XU Qin, LI Boyang, LIU Bojie. Greenhouse Temperature and Humidity Prediction Method Based on Adaptive Kalman Filter and GWO-LSTM-Attention [J]. Smart Agriculture, 2026, 8(1): 148-155. |
| [5] | YAO Xiaotong, QU Shaoye. Lightweight Detection Method for Pepper Leaf Diseases and Pests Based on Improved YOLOv12s [J]. Smart Agriculture, 2026, 8(1): 1-14. |
| [6] | DANG Shanshan, QIAO Shicheng, BAI Mingyu, ZHANG Mingyue, ZHAO Chenyu, PAN Chunyu, WANG Guochen. Small Target Detection Method of Maize Leaf Disease Based on DCC-YOLOv10n [J]. Smart Agriculture, 2025, 7(5): 124-135. |
| [7] | LIU Yiheng, LIU Libo. Beef Cattle Object Detection Method Under Occlusion Environment Based on Improved YOLOv12 [J]. Smart Agriculture, 2025, 7(5): 182-192. |
| [8] | WANG Yi, XUE Rong, HAN Wenting, SHAO Guomin, HOU Yanqiao, CUI Xitong. Estimation of Maize Aboveground Biomass Based on CNN-LSTM-SA [J]. Smart Agriculture, 2025, 7(4): 159-173. |
| [9] | CHANG Jian, WANG Bingbing, YIN Long, LI Yanqing, LI Zhaoxin, LI Zhuang. The Lightweight Bee Pollination Recognition Model Based On YOLOv10n-CHL [J]. Smart Agriculture, 2025, 7(3): 185-198. |
| [10] | PENG Qiujun, LI Weiran, LIU Yeqiang, LI Zhenbo. High-Precision Fish Pose Estimation Method Based on Improved HRNet [J]. Smart Agriculture, 2025, 7(3): 160-172. |
| [11] | XIE Jiyuan, ZHANG Dongyan, NIU Zhen, CHENG Tao, YUAN Feng, LIU Yaling. Accurate Detection of Tree Planting Locations in Inner Mongolia for The Three North Project Based on YOLOv10-MHSA [J]. Smart Agriculture, 2025, 7(3): 108-119. |
| [12] | LI Zusheng, TANG Jishen, KUANG Yingchun. A Lightweight Model for Detecting Small Targets of Litchi Pests Based on Improved YOLOv10n [J]. Smart Agriculture, 2025, 7(2): 146-159. |
| [13] | SI Chaoguo, LIU Mengchen, WU Huarui, MIAO Yisheng, ZHAO Chunjiang. Chilli-YOLO: An Intelligent Maturity Detection Algorithm for Field-Grown Chilli Based on Improved YOLOv10 [J]. Smart Agriculture, 2025, 7(2): 160-171. |
| [14] | NIU Ziang, QIU Zhengjun. Extraction Method of Maize Plant Skeleton and Phenotypic Parameters Based on Improved YOLOv11-Pose [J]. Smart Agriculture, 2025, 7(2): 95-105. |
| [15] | WU Liuai, XU Xueke. Lightweight Tomato Leaf Disease and Pest Detection Method Based on Improved YOLOv10n [J]. Smart Agriculture, 2025, 7(1): 146-155. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







