| 1 |
YU Y B, CHOI J H, KANG J C, et al. Shrimp bacterial and parasitic disease listed in the OIE: A review[J]. Microbial pathogenesis, 2022, 166: ID 105545.
|
| 2 |
LEE D, YU Y B, CHOI J H, et al. Viral shrimp diseases listed by the OIE: A review[J]. Viruses, 2022, 14(3): ID 585.
|
| 3 |
蔡欣欣. 池塘养殖凡纳滨对虾急性肝胰腺坏死病(AHPND)的预警数学模型构建[D]. 上海: 上海海洋大学, 2021.
|
|
CAI X X. Early warning mathematical model of acute hepatopancreatic necrosis disease (AHPND) in pond cultured shrimp Litopenaeus vannamei [D]. Shanghai: Shanghai Ocean University, 2021.
|
| 4 |
KHIEM N M, TAKAHASHI Y, YASUMA H, et al. Use of GIS and machine learning to predict disease in shrimp farmed on the east coast of the Mekong Delta, Vietnam[J]. Fisheries science, 2022, 88(1): 1-13.
|
| 5 |
TUYEN T T, AL-ANSARI N, NGUYEN D D, et al. Prediction of white spot disease susceptibility in shrimps using decision trees based machine learning models[J]. Applied water science, 2023, 14(1): 1-15.
|
| 6 |
孙世玉, 江敏, 金若晨, 等. 凡纳滨对虾池塘养殖过程中水质与虾虹彩病毒病发生的相关性[J]. 上海海洋大学学报, 2020, 29(5): 641-649.
|
|
SUN S Y, JIANG M, JIN R C, et al. Correlation between water quality and shrimp hemocyte iridescent virus disease occurrence of Litopenaeus vannamei in ponds[J]. Journal of Shanghai ocean university, 2020, 29(5): 641-649.
|
| 7 |
RAMACHANDRAN L, MOHAN V. A novel neural network model for shrimp segmentation to detect white spot syndrome[J]. Journal of intelligent & fuzzy systems: Applications in engineering and technology, 2022, 43(1): 1453-1466.
|
| 8 |
WANG Q P, QIAN C, NIE P C, et al. Rapid detection of Penaeus vannamei diseases via an improved LeNet[J]. Aquacultural engineering, 2023, 100: ID 102296.
|
| 9 |
刘子豪, 张素兰, 贾小军, 等. 基于自适应卷积神经网络的染病虾识别方法[J]. 农业机械学报, 2022, 53(5): 246-256.
|
|
LIU Z H, ZHANG S L, JIA X J, et al. Diseased shrimp identification method based on adaptive convolutional neural networks[J]. Transactions of the Chinese society for agricultural machinery, 2022, 53(5): 246-256.
|
| 10 |
JIANG B, SONG H B, WANG H, et al. Dairy cow lameness detection using a back curvature feature[J]. Computers and electronics in agriculture, 2022, 194: ID 106729.
|
| 11 |
CHEN J X, ZHOU J, LIU L S, et al. Sow farrowing early warning and supervision for embedded board implementations[J]. Sensors, 2023, 23(2): ID 727.
|
| 12 |
张然. 蛋鸡啄羽现象识别及羽毛覆盖度计算研究[D]. 保定: 河北农业大学, 2023.
|
|
ZHANG R. Study on identification of feather pecking phenomenon and calculation of feather coverage in laying hens[D]. Baoding: Hebei Agricultural University, 2023.
|
| 13 |
XU Y L, NIE J, CEN H L, et al. Spatio-temporal-based identification of aggressive behavior in group sheep[J]. Animals: An open access journal from MDPI, 2023, 13(16): ID 2636.
|
| 14 |
位威. 高密度水产养殖鱼视觉监测技术研究[D]. 福州: 福建工程学院, 2022.
|
|
WEI W. Research on visual monitoring technology of high-density aquaculture fish[D]. Fuzhou: Fujian University of Technology, 2022.
|
| 15 |
周超, 徐大明, 吝凯, 等. 基于近红外机器视觉的鱼类摄食强度评估方法研究[J]. 智慧农业, 2019, 1(1): 76-84.
|
|
ZHOU C, XU D M, LIN K, et al. Evaluation of fish feeding intensity in aquaculture based on near-infrared machine vision[J]. Smart agriculture, 2019, 1(1): 76-84.
|
| 16 |
刘朝阳. 室外养殖池塘智能投饵管控系统设计[D]. 天津: 天津科技大学, 2022.
|
|
LIU C Y. Design of intelligent feeding contorl system for outdoor aquaculture pond[D]. Tianjin: Tianjin University of Science & Technology, 2022.
|
| 17 |
刘世晶, 涂雪滢, 钱程, 等. 基于帧间光流特征和改进RNN的草鱼摄食状态分类[J]. 水生生物学报, 2022, 46(6): 914-921.
|
|
LIU S J, TU X Y, QIAN C, et al. Feeding state classification of grass carp based on optical flow and improved RNN[J]. Acta hydrobiologica sinica, 2022, 46(6): 914-921.
|
| 18 |
汪峰. 基于计算机视觉的虾苗活力分析研究[D]. 上海: 上海海洋大学, 2022.
|
|
WANG F. Research on the vitality analysis of shrimp fry based on computer vision[D]. Shanghai: Shanghai Ocean University, 2022.
|
| 19 |
ZHAO J, GU Z B, SHI M M, et al. Spatial behavioral characteristics and statistics-based kinetic energy modeling in special behaviors detection of a shoal of fish in a recirculating aquaculture system[J]. Computers and electronics in agriculture, 2016, 127: 271-280.
|
| 20 |
HAN F F, ZHU J C, LIU B, et al. Fish shoals behavior detection based on convolutional neural network and spatiotemporal information[J]. IEEE access, 2020, 8: 126907-126926.
|
| 21 |
LI X H, LIU M Q, ZHANG S L, et al. Fish trajectory extraction based on object detection[C]// 2020 39th Chinese Control Conference (CCC). Piscataway, New Jersey, USA: IEEE, 2020: 6584-6588.
|
| 22 |
LI W R, LI F, LI Z B. CMFTNet: Multiple fish tracking based on counterpoised JointNet[J]. Computers and electronics in agriculture, 2022, 198: ID 107018.
|
| 23 |
XU W K, LIU C, WANG G X, et al. Behavioral response of fish under ammonia nitrogen stress based on machine vision[J]. Engineering applications of artificial intelligence, 2024, 128: ID 107442.
|
| 24 |
PÉREZ-ESCUDERO A, VICENTE-PAGE J, HINZ R C, et al. idTracker: Tracking individuals in a group by automatic identification of unmarked animals[J]. Nature methods, 2014, 11(7): 743-748.
|
| 25 |
FARNEBÄCK G. Two-frame motion estimation based on polynomial expansion[M]// BIGUN J, GUSTAVSSON T. Eds. Image analysis. Berlin, Heidelberg: Springer Berlin Heidelberg, 2003: 363-370.
|
| 26 |
CHEN J R, KAO S H, HE H, et al. Run, don't walk: Chasing higher FLOPS for faster neural networks[C]// 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, New Jersey, USA: IEEE, 2023: 12021-12031.
|
| 27 |
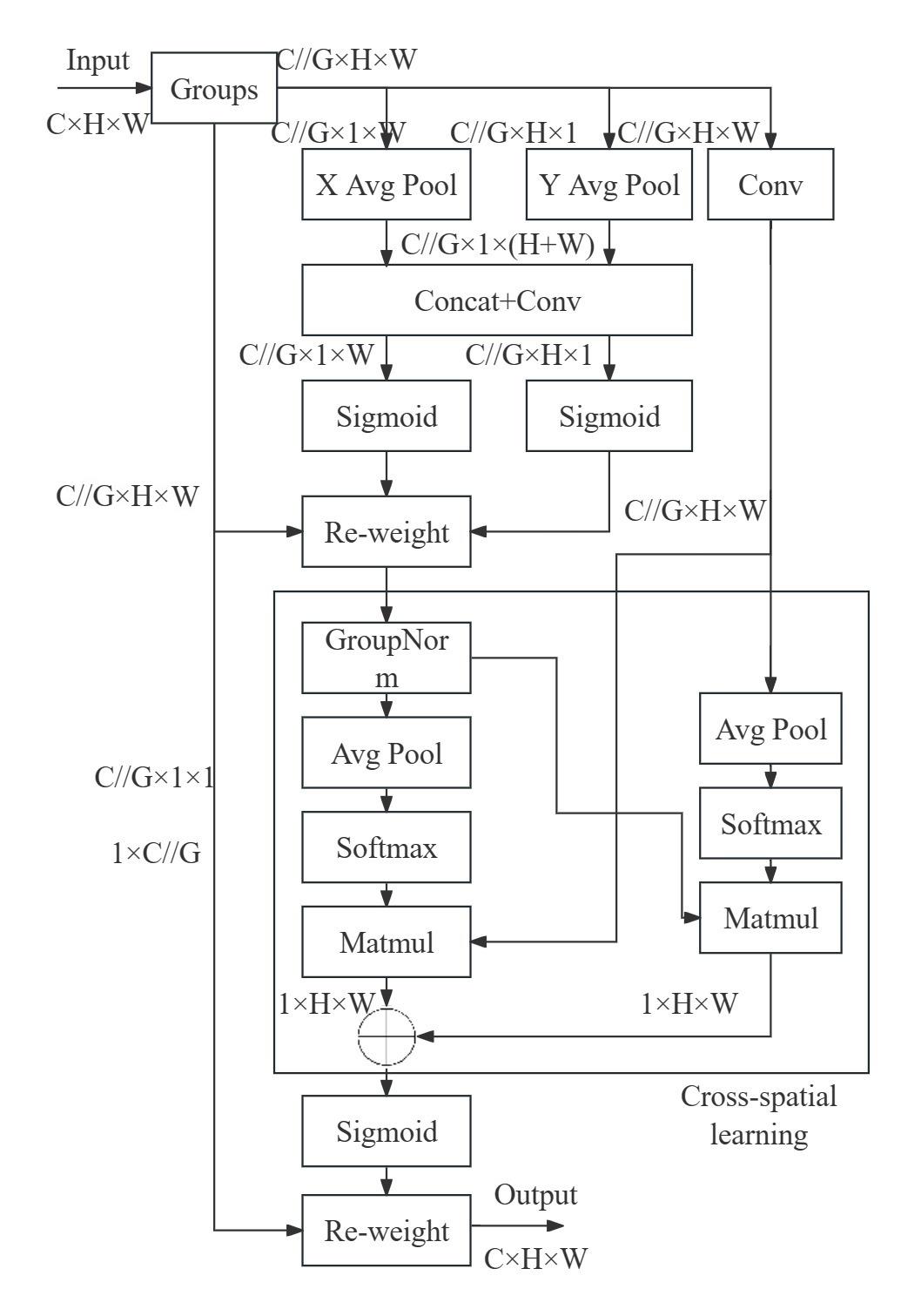
OUYANG D L, HE S, ZHANG G Z, et al. Efficient multi-scale attention module with cross-spatial learning[C]// ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Piscataway, New Jersey, USA: IEEE, 2023: 1-5.
|
| 28 |
陈凯琳. 南美白对虾栖息、生长及游泳特性试验研究[D]. 舟山: 浙江海洋大学, 2020.
|
|
CHEN K L. Experimental study on Penaeus vannamei's habitat, growth and swimming characteristics[D]. Zhoushan: Zhejiang Ocean University, 2020.
|
| 29 |
LIAO X X, CAI Z M, CHEN J, et al. Physics-based optical flow estimation under varying illumination conditions[J]. Signal processing: Image communication, 2023, 117: ID 117007.
|
| 30 |
CHEN H, WANG Y, GUO J, et al. VanillaNet: The power of minimalism in deep learning[EB/OL]. arXiv:2305.12972v2, 2023.
|
| 31 |
CHENG G, YUAN X, YAO X W, et al. Towards large-scale small object detection: Survey and benchmarks[C]// IEEE Transactions on Pattern Analysis and Machine Intelligence. Piscataway, New Jersey, USA: IEEE, 2023: 13467-13488.
|
 ), 陈琛1,3,4(
), 陈琛1,3,4(