Smart Agriculture ›› 2024, Vol. 6 ›› Issue (3): 1-16.doi: 10.12133/j.smartag.SA202312015
• Topic--Smart Agricultural Technology and Machinery in Hilly and Mountainous Areas • Previous Articles Next Articles
MU Xiaodong1,2, YANG Fuzeng1,2( ), DUAN Luojia1,2, LIU Zhijie1,2, SONG Zhuoying1,2, LI Zonglin1,2, GUAN Shouqing3
), DUAN Luojia1,2, LIU Zhijie1,2, SONG Zhuoying1,2, LI Zonglin1,2, GUAN Shouqing3
Received:2023-12-18
Online:2024-05-30
Foundation items:National Key R&D Program Project(2022YFD2001300); National Major Agricultural Special Project(NK2022160103)
About author:corresponding author:
CLC Number:
MU Xiaodong, YANG Fuzeng, DUAN Luojia, LIU Zhijie, SONG Zhuoying, LI Zonglin, GUAN Shouqing. Research Advances and Development Trend of Mountainous Tractor Leveling and Anti-Rollover System[J]. Smart Agriculture, 2024, 6(3): 1-16.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.smartag.net.cn/EN/10.12133/j.smartag.SA202312015
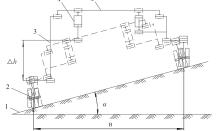
Fig. 1
Hydraulic differential height leveling mechanism


Fig. 2
Micro remote-controlled mountain tracked tractor driving on contour lines

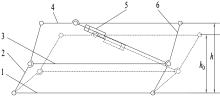
Fig. 3
Principle diagram of parallel four bar leveling

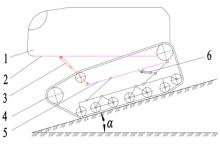
Fig. 4
Longitudinal leveling principle diagram of hillside tractor
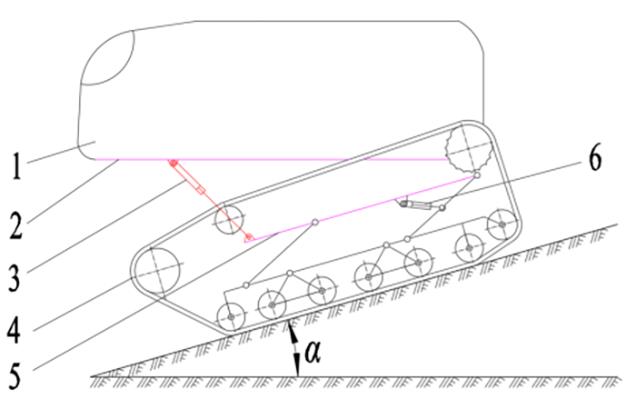
Fig. 5
Schematic diagram of adjustable center of gravity leveling mechanism
| a. 重心可调式履带小车三维 模型 | b. 重心可调式履带小车内部结构剖视图 |

Fig. 6
Structural diagram of the folding and twisting waist adjustment mechanism
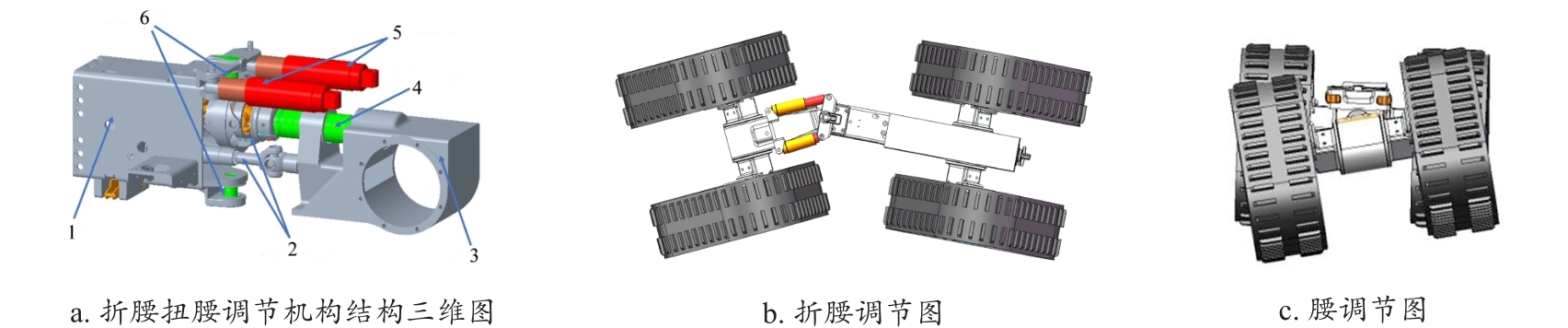

Fig. 7
MACH 4R hillside tractor of Italian Corolla company


Fig. 8
Sky-Jump-V950 hillside tractor of Italy BCS company


Fig. 9
Twisting and swinging wheeled hillside tractor


Fig. 10
Dongfanghong MH904M hilly and mountainous tractor


Fig. 11
Four wheel independent levelling grape harvester

Fig.12
Four wheel independent hydraulic leveling hilly tractor

Fig. 13
Omnidirectional leveling crawler type working machine
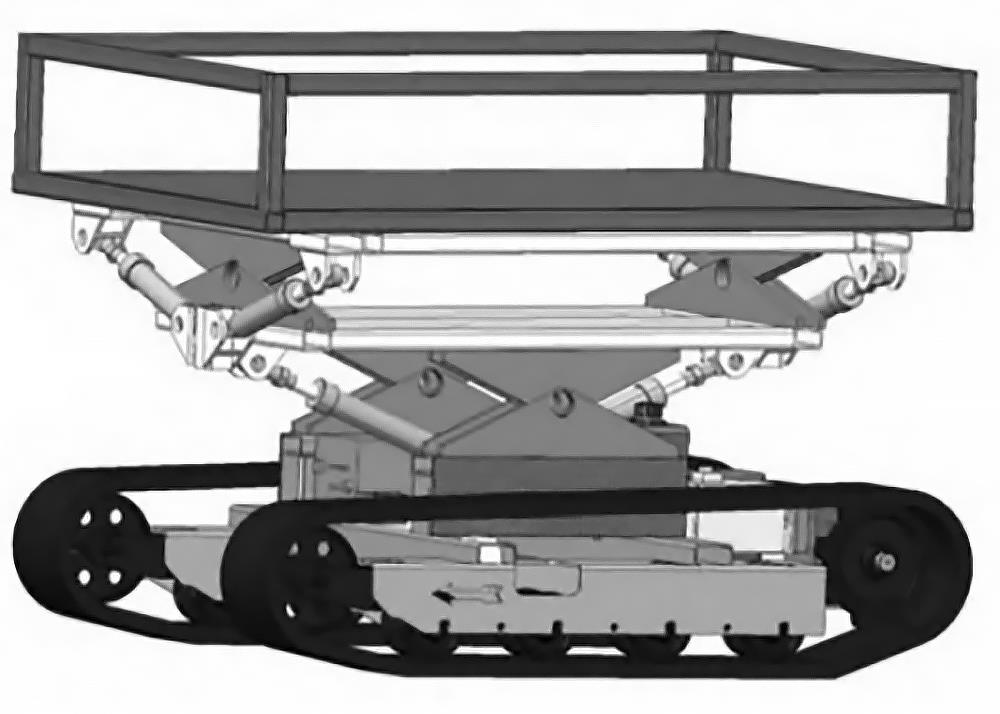
Table 1
Comparison of five types of leveling mechanisms
| 调平机构 | 优点 | 缺点 | 适合应用场景 |
|---|---|---|---|
| 液压差高式 | 1. 等高线作业效果好 2. 结构原理简单 3. 坡地适应性好 | 1. 上坡稳定性差 2. 地面附着性较差 | 1. 坡面起伏较缓 2. 坡地等高线作业 |
| 平行四杆式 | 1. 结构简单 2. 故障率低 | 调平自由度有限 | 1. 坡面起伏较缓 2. 坡地等高线作业 |
| 重心可调式 | 1. 牵引效率高 2. 上坡稳定性好 3. 坡地适应性好 | 1. 结构较复杂 2. 需要多层车架 | 1. 上、下陡坡作业 2. 坡面起伏较陡 |
| 折腰扭腰式 | 1. 对崎岖地面适应性好 2. 转弯半径小 3. 灵活性好 4. 结构紧凑 | 1. 不适合大坡度作业 2. 价格昂贵 3. 结构复杂 4. 对驾驶人员水平要求较高 | 1. 坡面崎岖不平 2. 碎小地块 3. 坡面起伏较缓 |
| 全向调平式 | 1. 牵引效率高 2. 上坡稳定性好 3. 坡地适应性好 | 1. 价格昂贵 2. 维修保养复杂 | 1. 上、下陡坡作业 2. 坡面起伏较陡 3. 坡面崎岖不平 |

Fig. 14
SKH-60 mountain tractor of Swiss St. Regis company


Fig. 15
Aebi Terratrac series mountain tractors of Switzerland company

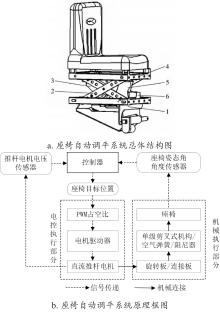
Fig. 16
Agricultural machinery seat automatic leveling system
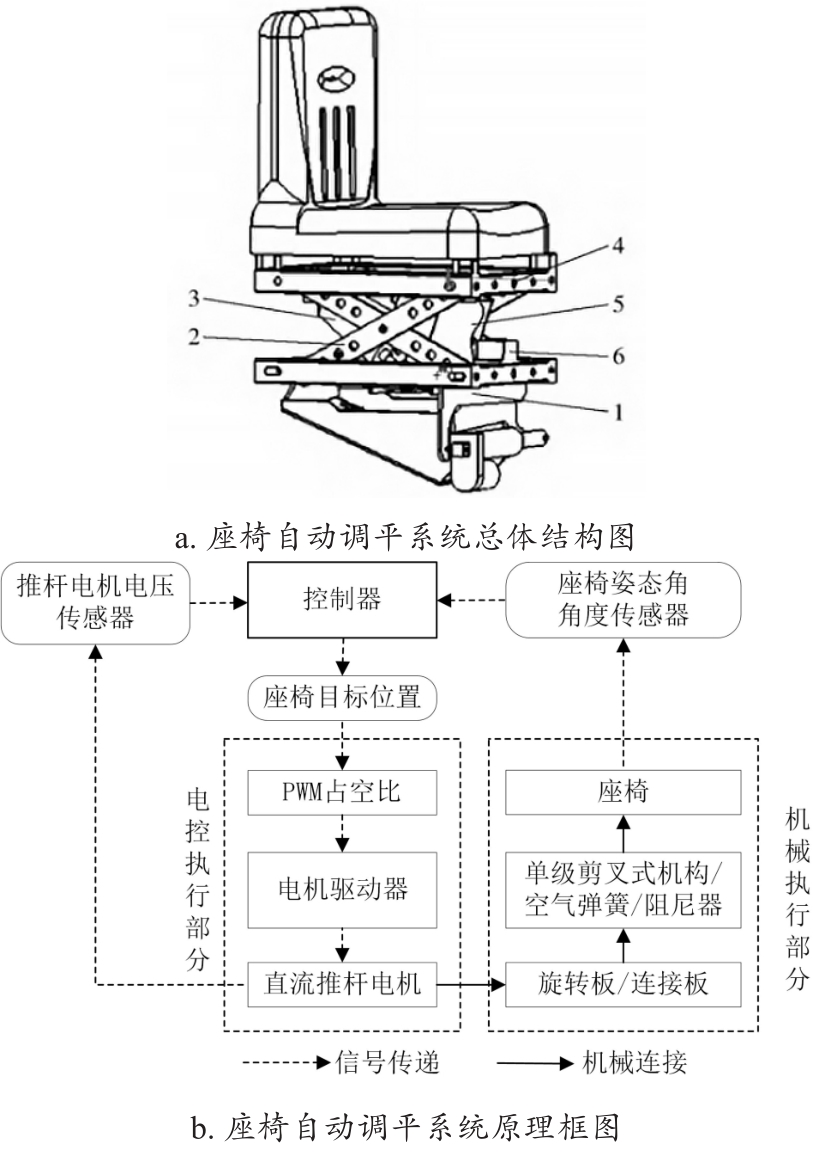

Fig. 17
Driving platform automatic leveling system
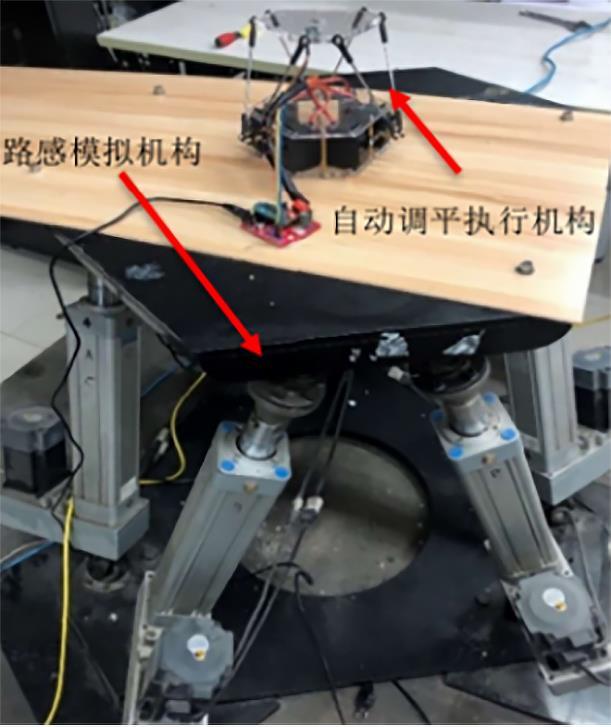

Fig. 18
Collaborative leveling of vehicle body and agricultural machinery on slopes
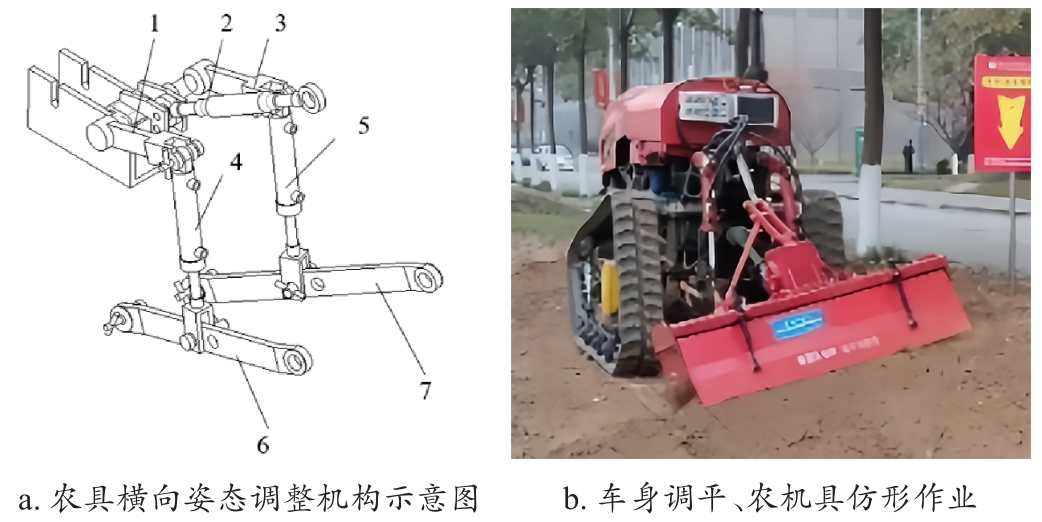
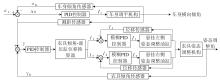
Fig. 19
Principle diagram of attitude cooperative control system for hillside tractor and farm tool


Fig. 20
Tractor roll protection structure


Fig. 21
Tractor rollover detection system
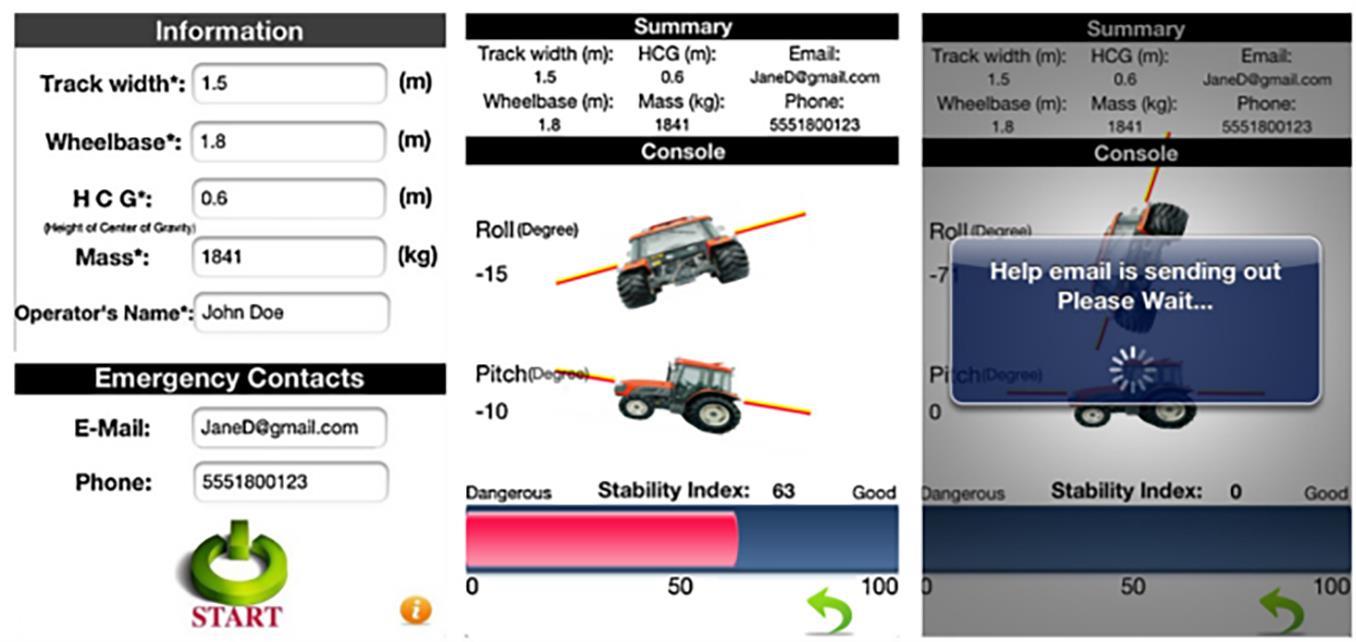

Fig. 22
Scale-model tractor rollover test
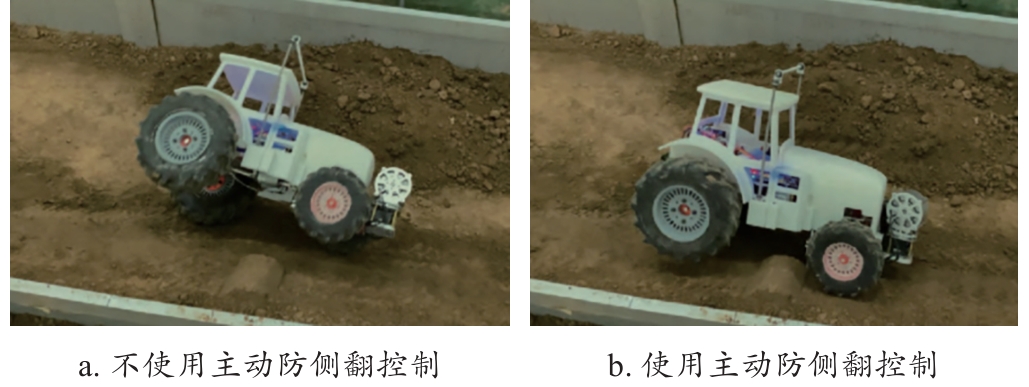
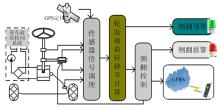
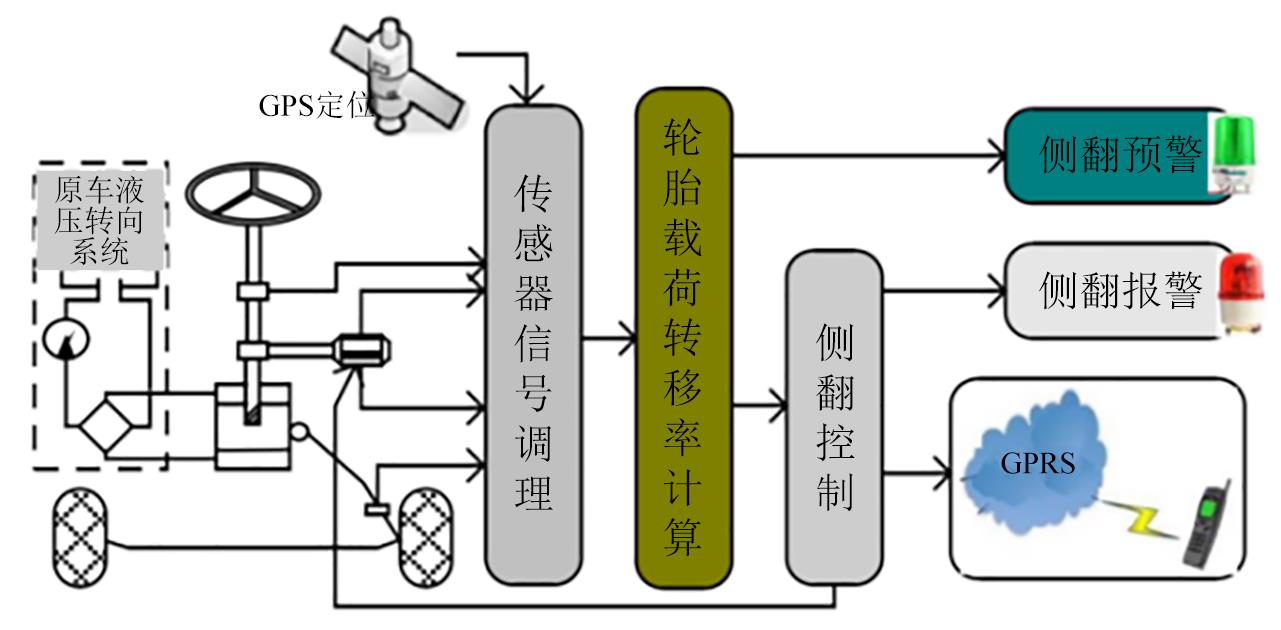
Fig. 23
Tractor anti-rollover warning and control system
| 1 |
罗锡文. 对发展丘陵山区农业机械化的思考[J]. 农机科技推广, 2011(2): 17-20.
|
|
|
|
| 2 |
中华人民共和国自然资源部. 第三次全国国土调查主要数据公报[EB/OL]. [2021-08-26].
|
| 3 |
孙景彬, 刘志杰, 杨福增, 等. 丘陵山地农业装备与坡地作业关键技术研究综述[J]. 农业机械学报, 2023, 54(5): 1-18.
|
|
|
|
| 4 |
白学峰, 常江雪, 滕兆丽, 等. 我国智能农业拖拉机关键技术研究进展[J]. 智能化农业装备学报(中英文), 2022, 3(2): 10-21.
|
|
|
|
| 5 |
夏长高, 杨宏图, 韩江义, 等. 山地拖拉机调平系统的研究现状及发展趋势[J]. 中国农业大学学报, 2018, 23(10): 130-136.
|
|
|
|
| 6 |
李轶林. 山地履带拖拉机姿态调平控制系统的研究与设计[D]. 杨凌: 西北农林科技大学, 2020.
|
|
|
|
| 7 |
王涛. 山地拖拉机车身自动调平控制系统的设计与试验[D]. 杨凌: 西北农林科技大学, 2014.
|
|
|
|
| 8 |
刘恒培, 杨福增, 刘世, 等. 差高机构对微型履带山地拖拉机稳定性的影响[J]. 拖拉机与农用运输车, 2013, 40(1): 18-21.
|
|
|
|
| 9 |
张季琴, 杨福增, 刘美丽, 等. 山地微耕机液压差高装置的设计[J]. 拖拉机与农用运输车, 2011, 38(3): 92-93, 96.
|
|
|
|
| 10 |
|
| 11 |
|
| 12 |
高墨尧. 丘陵山地农机动力底盘及车身调平装置研究[D]. 长春: 吉林农业大学, 2017.
|
|
|
|
| 13 |
韩振浩, 朱立成, 苑严伟, 等. 基于重心自适应调控的山地果园运输车设计与试验[J]. 农业机械学报, 2022, 53(2): 430-442.
|
|
|
|
| 14 |
宁普才. 电动拖拉机动力及重心纵向调整机构设计与试验[D]. 杨凌: 西北农林科技大学, 2021.
|
|
|
|
| 15 |
吴清分. BCS公司Sky-Jump-V950型半履带式拖拉机[J]. 拖拉机与农用运输车, 2019, 46(6): 8-10, 13.
|
|
|
|
| 16 |
张斓. 轮式丘陵山地拖拉机扭腰姿态调整装置的设计与试验[D]. 泰安: 山东农业大学, 2022.
|
|
|
|
| 17 |
|
| 18 |
王祉涵. 工程车辆机电式自动调平系统的研究[D]. 沈阳: 沈阳工业大学, 2022.
|
|
|
|
| 19 |
舒鑫. 高地隙植保机转向与调平控制系统研究[D]. 长沙: 湖南农业大学, 2019.
|
|
|
|
| 20 |
杨华兵. 基于模糊PID的丘陵山地拖拉机车身自动调平控制系统的研究[D]. 雅安: 四川农业大学, 2021.
|
|
|
|
| 21 |
齐文超. 丘山地拖拉机姿态主动调整系统研究[D]. 上海: 上海交通大学, 2020.
|
|
|
|
| 22 |
赵恩鹏. 丘陵山地拖拉机车身姿态自调整机构运动学与动力学分析[D]. 长春: 吉林大学, 2018.
|
|
|
|
| 23 |
李洪龙. 丘陵山地拖拉机调平液压系统动态特性仿真与实验研究[D]. 济南: 山东建筑大学, 2018.
|
|
|
|
| 24 |
刘平义, 王春燕, 李海涛, 等. 丘陵山区农用仿形行走动态调平底盘设计与试验[J]. 农业机械学报, 2018, 49(2): 74-81.
|
|
|
|
| 25 |
王忠山. 丘陵山地拖拉机车身调平系统及调平控制研究[D]. 长春: 吉林大学, 2022.
|
|
|
|
| 26 |
江洲. 拖拉机姿态自调整转向驱动桥振动分析与结构优化[D]. 长春: 吉林大学, 2021.
|
|
|
|
| 27 |
邹大庆, 丁仁凯, 石放辉, 等. 丘陵山区履带式作业机全向调平系统设计[J]. 农业装备技术, 2023, 49(4): 11-13.
|
|
|
|
| 28 |
孙泽宇, 夏长高, 蒋俞, 等. 基于QBP-PID的履带式作业机全向调平控制研究[J]. 农业机械学报, 2023, 54(12): 397-406.
|
|
|
|
| 29 |
唐瑜. 农机驾驶座椅自动调平系统研究[D]. 杨凌: 西北农林科技大学, 2010.
|
|
|
|
| 30 |
唐瑜, 朱瑞祥, 孙向楠, 等. 农机驾驶座椅自适应水平调节系统设计与实现[J]. 农机化研究, 2010, 32(1): 78-80.
|
|
|
|
| 31 |
唐瑜, 朱瑞祥. 农机驾驶座椅水平调节系统设计[J]. 农机化研究, 2012, 34(7): 139-142.
|
|
|
|
| 32 |
杨洋, 程尚坤, 齐健, 等. 基于人机工效学的农机座椅自动调平系统设计与试验[J]. 农业机械学报, 2022, 53(6): 434-442.
|
|
|
|
| 33 |
史名奇. 自动调平汽车座椅设计[J]. 无线互联科技, 2020, 17(19): 66-67.
|
|
|
|
| 34 |
姚宗伯. 林业装备驾驶平台自动调平系统设计与研究[D]. 北京: 北京林业大学, 2020.
|
|
|
|
| 35 |
王萧. 丘陵山地履带拖拉机车身自适应调平系统的研究[D]. 雅安: 四川农业大学, 2020.
|
|
|
|
| 36 |
张锦辉, 李彦明, 齐文超, 等. 基于神经网络PID的丘陵山地拖拉机姿态同步控制系统[J]. 农业机械学报, 2020, 51(12): 356-366.
|
|
|
|
| 37 |
周浩, 胡炼, 罗锡文, 等. 旋耕机自动调平系统设计与试验[J]. 农业机械学报, 2016, 47(S1): 117-123.
|
|
|
|
| 38 |
蒋俊, 张建, 冯贻江, 等. 丘陵山地拖拉机电液悬挂系统的设计与仿真分析[J]. 浙江师范大学学报(自然科学版), 2019, 42(1): 31-35.
|
|
|
|
| 39 |
杨福增, 牛瀚麟, 孙景彬, 等. 山地履带拖拉机与农具姿态协同控制系统设计与试验[J]. 农业机械学报, 2022, 53(1): 414-422.
|
|
|
|
| 40 |
吴帆. 旋耕机遥控驾驶与自动调平系统研究[D]. 长沙: 湖南农业大学, 2020.
|
|
|
|
| 41 |
谢斌, 李皓, 朱忠祥, 等. 基于倾角传感器的拖拉机悬挂机组耕深自动测量方法[J]. 农业工程学报, 2013, 29(4): 15-21.
|
|
|
|
| 42 |
|
| 43 |
|
| 44 |
|
| 45 |
|
| 46 |
United States Department of Labor. Census of fatal occupational injuries[R]. Washington DC: Bureau of Labor Statistics, 2005.
|
| 47 |
|
| 48 |
|
| 49 |
|
| 50 |
|
| 51 |
|
| 52 |
|
| 53 |
|
| 54 |
|
| 55 |
|
| 56 |
|
| 57 |
|
| 58 |
秦嘉浩, 李臻, 光岡宗司, 等. 基于模型实验的拖拉机配置对稳定性的影响差异[J]. 吉林大学学报(工学版), 2019, 49(4): 1236-1245.
|
|
|
|
| 59 |
郭腾飞. 东风304A拖拉机乘驾操作人机设计与侧翻预警研究[D]. 沈阳: 沈阳建筑大学, 2015.
|
|
|
|
| 60 |
康杰, 聂友红, 何培祥. 轮式拖拉机主动防侧翻系统的设计[J]. 农机化研究, 2023, 45(2): 236-240.
|
|
|
|
| 61 |
庄家鹏. 姿态可调丘陵山地拖拉机稳定性研究[D]. 济南: 山东大学, 2020.
|
|
|
|
| 62 |
李延凯. 考虑防侧翻的高地隙植保机路径跟踪控制方法[D]. 合肥: 安徽农业大学, 2021.
|
|
|
|
| 63 |
袁冠豪. 轮式拖拉机侧翻预警及主动转向防侧翻控制系统研究[D]. 聊城: 聊城大学, 2022.
|
|
|
| [1] | LONG Yuqiao, SUN Jing, WEN Yanru, WANG Chuya, DONG Xiuchun, HUANG Ping, WU Wenbin, CHEN Jin, DING Mingzhong. Remote Sensing Approaches for Cropland Abandonment Perception in Southern Hilly and Mountainous Areas of China: A Review [J]. Smart Agriculture, 2025, 7(6): 58-74. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||







