| 1 |
VU N T, KIM H, LEE S, et al. Bacteriophage cocktail for biocontrol of soft rot disease caused by Pectobacterium species in Chinese cabbage[J]. Applied microbiology and biotechnology, 2023, 108(1): ID 11.
|
| 2 |
魏小春, 原玉香, 李林, 等. 大白菜抗干烧心病研究进展[J]. 中国瓜菜, 2022, 35(12): 1-6.
|
|
WEI X C, YUAN Y X, LI L, et al. Advances of tipburn resistance in Chinese cabbage[J]. China cucurbits and vegetables, 2022, 35(12): 1-6.
|
| 3 |
DENG L M, LI J, HAN Z Z. Online defect detection and automatic grading of carrots using computer vision combined with deep learning methods[J]. LWT-food science and technology, 2021, 149: ID 111832.
|
| 4 |
杨征鹤, 杨会民, 喻晨, 等. 设施蔬菜自动对靶喷药技术研究现状与分析[J]. 新疆农业科学, 2021, 58(8): 1547-1557.
|
|
YANG Z H, YANG H M, YU C, et al. Research status and analysis of automatic target spraying technology for facility vegetables[J]. Xinjiang agricultural sciences, 2021, 58(8): 1547-1557.
|
| 5 |
ZHAO Y, GAO R Z, MA C Q, et al. Design of an intelligent target spraying robot for processing hyphantria cunea larva nets[J]. Recent patents on engineering, 2021, 14(4): 620-628.
|
| 6 |
LIU M J, TANG W J, ZHAO R M, et al. Improving detection of wheat canopy chlorophyll content based on inhomogeneous light correction[J]. Computers and electronics in agriculture, 2024, 226: ID 109361.
|
| 7 |
ZHAO X G, WANG X, LI C L, et al. Cabbage and weed identification based on machine learning and target spraying system design[J]. Frontiers in plant science, 2022, 13: ID 924973.
|
| 8 |
WANG W H, WANG Y B, CAI L L, et al. Variable-rate fertilization in aCustard apple (annona squamosaL.) orchard based on the spatial variability of soil nutrients[J]. Applied fruit science, 2024, 66(3): 803-812.
|
| 9 |
AN Z, WANG C H, RAJ B, et al. Application of new technology of intelligent robot plant protection in ecological agriculture[J]. Journal of food quality, 2022, 2022: ID 1257015.
|
| 10 |
JIN X J, CHE J, CHEN Y. Weed identification using deep learning and image processing in vegetable plantation[J]. IEEE access, 2021, 9: 10940-10950.
|
| 11 |
PERUGACHI-DIAZ Y, TOMCZAK J M, BHULAI S. Deep learning for white cabbage seedling prediction[J]. Computers and electronics in agriculture, 2021, 184: ID 106059.
|
| 12 |
SUN X, ZHANG Y, TANG C L, et al. Development of the field of wheat plant protection precision spraying robot control system[J]. Applied mechanics and materials, 2016, 851: 427-432.
|
| 13 |
JALAL AL-SAMMARRAIE M A, JASIM N A. Determining the efficiency of a smart spraying robot for crop protection using image processing technology[J]. INMATEH agricultural engineering, 2021: 365-374.
|
| 14 |
赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15.
|
|
ZHAO C J, FAN B B, LI J, et al. Agricultural robots: Technology progress, challenges and trends[J]. Smart agriculture, 2023, 5(4): 1-15.
|
| 15 |
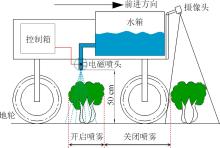
赵学观, 郑申玉, 易克传, 等. 考虑喷雾高度的大田蔬菜对靶喷雾系统设计与试验[J]. 农业工程学报, 2022, 38(11): 1-11.
|
|
ZHAO X G, ZHENG S Y, YI K C, et al. Design and experiment of the target-oriented spraying system for field vegetable considering spray height[J]. Transactions of the Chinese society of agricultural engineering, 2022, 38(11): 1-11.
|
| 16 |
权龙哲, 王建森, 奚德君, 等. 靶向灭草机器人药液喷洒空气动力学模型建立与验证[J]. 农业工程学报, 2017, 33(15): 72-80.
|
|
QUAN L Z, WANG J S, XI D J, et al. Aerodynamics modeling and validation on liquid medicine spraying of target weeding robot[J]. Transactions of the Chinese society of agricultural engineering, 2017, 33(15): 72-80.
|
| 17 |
JI X F, LI Y Z, HONG K L, et al. Design of a fully autonomous indoor spray robot[J]. International journal of intelligent robotics and applications, 2023, 7(4): 763-777.
|
| 18 |
MUSTAFID M A, SUBRATA I M, PRAMUHADI G, et al. Design and performance test of autonomous precision spraying robot for cabbage cultivation[J]. IOP conference series: Earth and environmental science, 2022, 1038(1): ID 012044.
|
| 19 |
孙竹,顾伟,崔龙飞,等. 智能植保装备关键技术研究现状与发展趋势 [J]. 智能化农业装备学报(中英文), 2024, 5 (4): 1-23.
|
|
SUN Z, GU W, CUI L, et al. Research status and development trends of key technologies for intelligent plant protection equipment[J]. Journal of intelligent agricultural mechanization, 2024, 5(4): 1-23.
|
| 20 |
FABULA J, SHARDA A, LUCK J D, et al. Nozzle pressure uniformity and expected droplet size of a pulse width modulation (PWM) spray technology[J]. Computers and electronics in agriculture, 2021, 190: ID 106388.
|
| 21 |
ZHOU M C, JIANG H Y, BING Z S, et al. Design and evaluation of the target spray platform[J]. International journal of advanced robotic systems, 2021, 18(2): ID 172988142199614.
|
| 22 |
MANGUS D L, SHARDA A, ENGELHARDT A, et al. Analyzing the nozzle spray fan pattern of an agricultural sprayer using pulse width modulation technology to generate an on-ground coverage map[J]. Transactions of the ASABE, 2017, 60(2): 315-325.
|
| 23 |
HASAN A S M M, SOHEL F, DIEPEVEEN D, et al. A survey of deep learning techniques for weed detection from images[J]. Computers and electronics in agriculture, 2021, 184: ID 106067.
|
| 24 |
孔维永. 关于盘州市大白菜常见病虫害防治的思考[J]. 种子科技, 2024, 42(10): 109-111.
|
|
KONG W Y. Thoughts on prevention and control of common diseases and pests of Chinese cabbage in Panzhou city[J]. Seed science & technology, 2024, 42(10): 109-111.
|
| 25 |
LOU H T, DUAN X H, GUO J M, et al. DC-YOLOv8: Small-size object detection algorithm based on camera sensor[J]. Electronics, 2023, 12(10): ID 2323.
|
| 26 |
农林机械 在用喷雾机的检测 第2部分: 水平喷杆式喷雾机: GB/T 32250.2—2022 [S]. 北京: 中国标准出版社, 2022.
|
 ), 胡军1,2(
), 胡军1,2(